工业机器人位置准确度和重复性指标的测量方法与计算
位置性能代表的是机器人在工作空间内运动点的特性,对于机器人在笛卡尔空间的运动,空间坐标系的原点代表机器人的指令位置,球状的点集群表示多个实际位置。那么,机器人的位置性能的评估主要包括:机器人的指令点位置和实际点位置的之间的相对关系评估;实际点位置之间的相互关系的评估。参考国标GB/T-12642,对位置准确度和重复性指标进行介绍。
一、前言
位置性能代表的是机器人在工作空间内运动点的特性,对于机器人在笛卡尔空间的运动,空间坐标系的原点代表机器人的指令位置,球状的点集群表示多个实际位置。那么,机器人的位置性能的评估主要包括:机器人的指令点位置和实际点位置的之间的相对关系评估;实际点位置之间的相互关系的评估。参考国标GB/T-12642,对位置准确度和重复性指标进行介绍。
二、测试点和轨迹的选取
选取测量点与轨迹原则
避开机器人工作空间边界和奇异点位置;点与点之间的距离尽量大一些;点与点之间尽量包含多个关节的变化。
测试空间
结合国标,在机器人工作空间里,建立一个测试立方体(长宽高=自定义,尽量大一些),取如图1所示的平面为测试平面,选取点P1(X1,Y1,Z1,W1,P1,R1),P2(X2,Y2,Z2,W2,P2.R2),P3(X3,Y3,Z3,W3,P3.R3),P4(X4,Y4,Z4,W4,P4,R4),P5(X5,Y5,Z5,W5,P5.R5)为测试点,取P1-P2-P3-P4-P5-P1为测试轨迹。
三、测试项目
3.1 位置准确度
定义
表示指令点位置和多次从同一方向接近该指令位置的实际位置平均值之间的偏差。如图所示OG的距离即表示位置准确度。
计算公式
其中:
3.2 位置重复性
定义
位置重复性表示的是从同一个方向到达相同的指令位置的所有实际位置的一致程度,主要代表了机器人重复到达固定点位姿的能力,保证位置重复性在一个较小的范围内是绝对定位精度测量的基本要求。
计算公式
位置重复性可表示为所有实际点到位置集群的中心的平均值,数据散布范围为3倍的标准偏差:
其中:ljl_jlj 表示单个点位置距点集群中心的距离; l‾\overline{l}l表示所有点位置距点集群中心距离的平均值; SlS_lSl表示的标准偏差,表达式如下: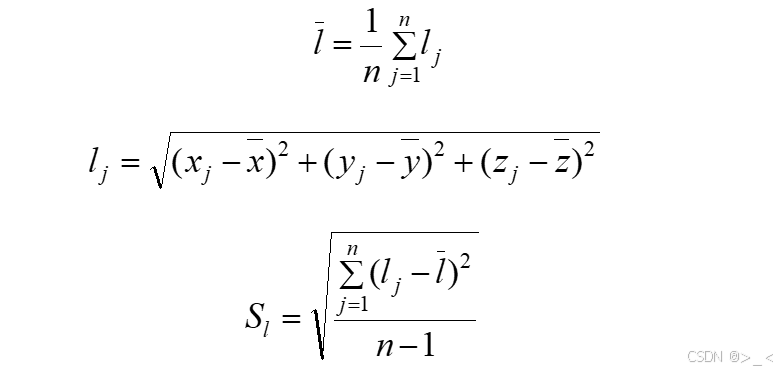

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 18
18 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)