Nachi_那智机器人_SETUSRCRD(FN837)
这里需要向各位说明的是:我司机器人坐标体现形式是X、Y、Z、r、p、y,这的r对应Rz(下图中Z轴周围旋转量),p对应Ry(下图中Y轴周围旋转量),y对应Rx(下图中X轴周围旋转量),这个问题还体现在LETR指令上,当用FN按键输入该指令时,可以看到它内部参数的顺序是:X、Y、Z、Rx=y、Ry=p、Rz=r;3.获取当前用户坐标系偏移量(当前用户坐标系与基准用户坐标系之间的偏差量),通常我们是通
SETUSRCRD:set user coordinate(修正用户坐标系原点)
说明:本指令用于修正用户坐标系原点
参数说明:SETUSRCRD 1,V31!,1
1. 1:想要修正的用户坐标系号码
2. V31!【V31!~V36!】:用户坐标系原点坐标(X,Y,Z,r,p,y)
3. 1:机构号码,通常情况下一般都是1,除非有焊枪或者外部轴(含行走轴)时会额外设定机构
使用方法:
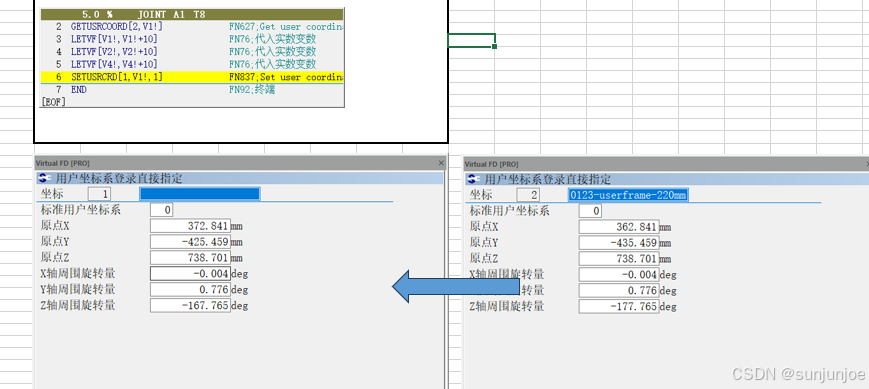
1.示教户坐标系的三个点(o,x和y)并登记:
需要注意的是:通常把这个用户坐标系登记两个,一个作为基准,它是不会被改变的;另一个作为修正后的新用户坐标系;
2.使用GETUSRCOORD(FN627)获取基准用户坐标系原点的值:
GETUSRCOORD 2,V31!
获取基准用户坐标系2#原点的值,并保存到V31!~V36!
3.获取当前用户坐标系偏移量(当前用户坐标系与基准用户坐标系之间的偏差量),通常我们是通过视觉获得的,与视觉约定在原点处制作模板,每次拍一次照获得偏移量
4.使用SETUSRCRD指令修正用户坐标系1#的原点。
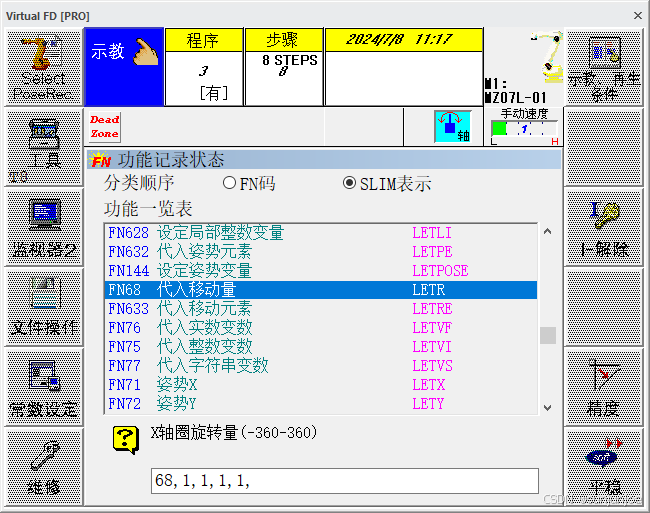
这里需要向各位说明的是:我司机器人坐标体现形式是X、Y、Z、r、p、y,这的r对应Rz(下图中Z轴周围旋转量),p对应Ry(下图中Y轴周围旋转量),y对应Rx(下图中X轴周围旋转量),这个问题还体现在LETR指令上,当用FN按键输入该指令时,可以看到它内部参数的顺序是:X、Y、Z、Rx=y、Ry=p、Rz=r;但当使用语言形式直接对R寄存器赋值时,它的顺序是X、Y、Z、Rz=r、Ry=p、Rx=y。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 7
7 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)