怎样用诺宝制作循迹机器人_基于诺宝RC环境下的机器人走简单轨迹
第1页共18页基于诺宝RC环境下的机器人走简单轨迹李发成摘要:机器人走轨迹是诺宝RC的最基本应用之一,也是机器人常规比赛项目之一,走轨迹包含了程序设计的三种基本结构,能充分体现程序设计的基本思想和方法,有助于学生对程序设计思想和方法的理解。本文研究的主要内容是机器人走简单轨迹,按机器人行走的的方式分类有“沿边法”和“靠中法”;按程序结构的分类有“单分支对称结构”、“二重分支对称结构”和“三重分支非
第
1
页
共
18
页
基于诺宝
RC
环境下的机器人走简单轨迹
李发成
摘要
:机器人走轨迹是诺宝
RC
的最基本应用之一,也是机器人常规比赛项目之
一,
走轨迹包含了程序设计的三种基本结构
,
能充分体现程序设计的基本思想和方法,
有助于学生对程序设计思想和方法的理解。
本文研究的主要内容是机器人走简单轨迹,
按机器人行走的的方式分类有
“沿边
法”和“靠中法”
;按程序结构的分类有“单分支对称结构”
、
“二重分支对称结构”
和“三重分支非对称结构”
。
本文通过对二种行走方式和三种程序结构的研究和对比,
揭示它们之间的内在联
系,通过实验分析,归纳程序与参数组合搭配对机器人行走速度和稳定性的影响。
关键词
:机器人,走轨迹,轨迹识别传感器,轨迹变量,沿边法,靠中法
机器人走轨迹看似简单,
但深究起来还是比较复杂的,
还别说含直锐角转弯、
缺
口、终点标志、色带瑕疵、障碍、传感源、宽窄不一等复杂的场地,就算对于简单轨
迹还是有许多情况需要讨论的。本文讨论的目的是通过研究各种程序和参数的变化,
对走轨迹进行定性和定量的分析和研究,
总结出程序和参数的组合优劣,
使机器人行
走的路径尽量的短、速度尽量的快、稳定性尽量的高。
第一章
基础知识
一、走轨迹与轨迹变量
1
、机器人走轨迹的概念
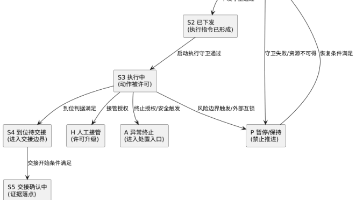
:机器人走轨迹是指机器人在色带上行走,有时可能会
临时偏离色带,但必需能再次寻找到色带,如下图
1
:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)