工业AMR场景融合设计原理8——任务阶段与跃迁守卫
自主移动机器人(AMR)任务阶段与跃迁守卫的工程实践解读
在智能制造与智慧物流场景中,自主移动机器人(AMR)已成为柔性自动化的重要载体。然而,AMR的价值不仅仅在于“能够移动”,更在于其任务执行过程的可预测、可审计、可裁决。本文将基于“任务阶段与迁移守卫”工程框架,深入解读AMR在实际应用场景中如何实现从任务创建到关闭的全过程受控管理。
一、AMR任务的阶段化建模:从物理动作到可审计里程碑
1.1 AMR典型任务阶段划分
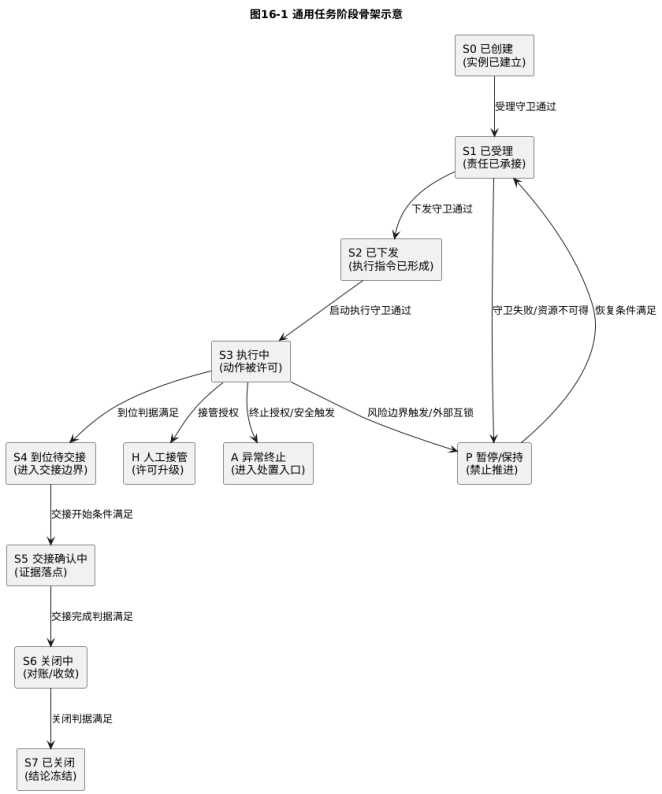
基于第16章提出的通用骨架,AMR物料搬运任务可细化为以下阶段:
| 阶段ID | 阶段名称 | AMR场景释义 |
|---|---|---|
| S0 | 已创建 | 任务指令已接收,实例ID生成,待分配 |
| S1 | 已受理 | 调度系统确认承接,AMR资源已匹配,责任主体明确 |
| S2 | 已下发 | 路径规划完成,数字指令已下发至AMR车载控制器 |
| S3 | 执行中 | AMR已启动,沿规划路径移动,实时上报状态 |
| S4 | 到位待交接 | AMR到达目标点(如上下料点),定位精度满足要求,等待交接条件 |
| S5 | 交接确认中 | 与目标设备(如输送线、提升机)进行物理/逻辑交互,证据收集 |
| S6 | 关闭中 | 任务成果对账,资源释放,异常结算 |
| S7 | 已关闭 | 任务记录冻结,进入历史库,支持事后审计 |
1.2 阶段即许可边界:AMR场景中的动作管控
每个阶段对应一组明确的“许可边界”:
-
S2(已下发)阶段:允许AMR预加载地图、自检传感器,但禁止实际驱动电机
-
S3(执行中)阶段:允许申请路径令牌、避障重规划,但禁止跨区域越权行驶
-
S4(到位待交接)阶段:允许微调定位、发送就绪信号,但禁止擅自执行装卸动作
二、迁移守卫在AMR场景中的三层事实裁决
2.1 物理事实(PF)层守卫
示例:S3→S4(执行中→到位待交接)守卫
yaml
guard_id: GD-AMR-ARRIVAL 依赖输入: - PF1: AMR定位坐标(激光SLAM/视觉定位) - PF2: 到位传感器状态(光电/机械触发) - PF3: 安全区域扫描结果(3D视觉/TOF) 判定规则: - 定位坐标与目标点偏差 < 50mm - 到位传感器持续触发 > 2秒 - 安全区域无动态障碍物 输出:通过/保持/升级 证据要求:定位数据片段 + 传感器事件序列 + 环境点云快照
2.2 社会事实(SF)层守卫
示例:S2→S3(已下发→执行中)守卫
yaml
guard_id: GD-AMR-RESOURCE-TOKEN 依赖输入: - SF1: 路径区域令牌获取状态(来自交通管理系统) - SF2: 操作员人工放行授权记录 - SF3: 交班期间任务冻结标志 判定规则: - 关键路口令牌已获取(互斥资源) - 如需人工确认,则必须有授权日志 - 非交班冻结时段 输出:通过/保持/终止 证据要求:令牌申请响应报文 + 授权操作日志 + 系统时间戳
2.3 业务事实(BF)层守卫
示例:S5→S6(交接确认中→关闭中)守卫
yaml
guard_id: GD-AMR-HANDOVER-VERIFY 依赖输入: - BF1: MES系统收货确认信号 - BF2: 物料ID扫码校验结果 - BF3: 任务超时计时器状态 判定规则: - MES确认收货 或 备选确认机制生效 - 物料ID与任务单匹配 - 未超过最长交接等待时间 输出:通过/升级(进入对账) 证据要求:MES接口响应 + 扫码记录 + 计时器快照

三、AMR任务失败的语义化落点与处置
3.1 典型失败场景与处理策略
| 失败场景 | 失败类型 | 阶段迁移 | 处置动作 | 恢复路径 |
|---|---|---|---|---|
| 激光导航信号丢失 | 保持 | S3→P(暂停) | AMR急停,启动重定位程序 | 信号恢复后自动继续 |
| 路径被临时障碍物阻断 | 保持 | S3→P | 等待超时后触发绕路重规划 | 规划成功则迁移回S3 |
| 充电桩被占用导致无法返航 | 升级 | S6→H(人工接管) | 通知调度员人工指派备用充电桩 | 人工确认后进入充电任务 |
| 物料扫码与任务单不匹配 | 终止 | S5→A(异常终止) | 进入异常处理流程,记录差异 | 需创建新的纠错任务 |
3.2 失败证据链的构建
text
AMR任务失败证据包示例: 1. 事件时间轴: - 15:30:02 进入S4阶段 - 15:30:45 发送“到位就绪”信号 - 15:33:00 仍未收到MES确认(超时) 2. 关键证据片段: - EVP-001: 到位传感器数据(持续触发) - EVP-002: 与MES通信报文(显示未响应) - EVP-003: 任务计时器状态(已超时) 3. 失败落点: - 阶段:S5→S6迁移失败 - 原因码:EC-MES-NO-RESPONSE - 处置入口:BP-0123(MES通信异常处理规程)
四、AMR场景中的交付资产实例
4.1 阶段规则表示例(片段)
yaml
asset_id: PG-AMR-MOVE-001
task_type: AMR_MATERIAL_TRANSPORT
stage_id: S3
stage_name: "执行中"
entry_criteria: "路径令牌获取成功,安全传感器自检通过"
allowed_actions_ref: PB-AMR-001#S3
exit_transitions:
- to_stage: S4
guard_ref: GD-AMR-ARRIVAL
- to_stage: P
guard_ref: GD-AMR-EMERGENCY_STOP
failure_landings:
- reason_code: EC-NAV-SIGNAL-LOST
action: HOLD
bp_ref: BP-AMR-005
required_evidence:
- "TOKEN_ACQUISITION_RECORD"
- "SAFETY_SENSOR_SNAPSHOT"
- "PERIODIC_POSITION_REPORT"
4.2 许可边界表示例(片段)
yaml
stage_id: S3
allow:
- "ADAPTIVE_PATH_PLANNING"
- "DYNAMIC_OBSTACLE_AVOIDANCE"
- "SPEED_ADJUSTMENT"
deny:
- "CROSS_ZONE_BOUNDARY"
- "SKIP_PREDEFINED_CHECKPOINTS"
escalate:
- action: "MANUAL_OVERRIDE_CONTROL"
require_auth: "SUPERVISOR_LEVEL"
audit_required: true
evidence_hint: "OVERRIDE_AUTHORIZATION_LOG"
五、工程实践价值与挑战
5.1 核心价值
-
争议收敛:当AMR任务出现异常时,可快速定位到具体阶段和守卫条件,避免“扯皮”
-
回归测试:基于阶段模型的测试用例设计,支持自动化回归验证
-
运维标准化:预定义的失败落点与处置规程,降低对专家经验的依赖
-
跨系统集成:基于事实层的守卫机制,统一AMR、MES、WMS、安全系统的裁决口径
5.2 实施挑战与对策
| 挑战 | 对策建议 |
|---|---|
| 传感器数据不一致 | 建立PF事实仲裁层,融合多源数据,定义置信度阈值 |
| 人工干预的审计难题 | 所有人工操作强制双因子认证,操作过程视频片段关联至证据包 |
| 多AMR协同冲突 | 引入分布式令牌机制,守卫条件中增加“协作伙伴状态”输入维度 |
| 老旧设备接口不支持 | 在事实层增加“设备代理适配器”,统一将老旧信号转换为标准事实表述 |
结语:从单机智能到系统可信
AMR的智能化不仅体现在单机的感知与决策能力,更体现在其任务执行全过程的可工程化、可审计化、可裁决化。通过“阶段模型+迁移守卫”的框架,AMR系统从“能够执行任务”升级为“可信地执行任务”——每一次推进都有据可查,每一次异常都有径可循,每一次裁决都有法可依。
这种工程化思维,正是AMR从实验室原型走向规模化工业应用的关键桥梁,也是构建未来智慧工厂“数字信任体系”的重要基石。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 22
22 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)