基于firefly rk3399 Android 7.1实现的ros服务小机器人
·
系统是用的firefly提供的Android 7.1自己编译的,系统层面改动不多,由于是在Android上实现ros功能,所以涉及的移植工作相对来说比较多且繁琐;
程序主要以apk形式运行,涉及到的算法都通过交叉编译编译成so库,通过jni调用; 手机和板子之间使用的是websocket通讯,通过手机可以很好的控制小车进行导航,定位,自动回冲等常见功能;
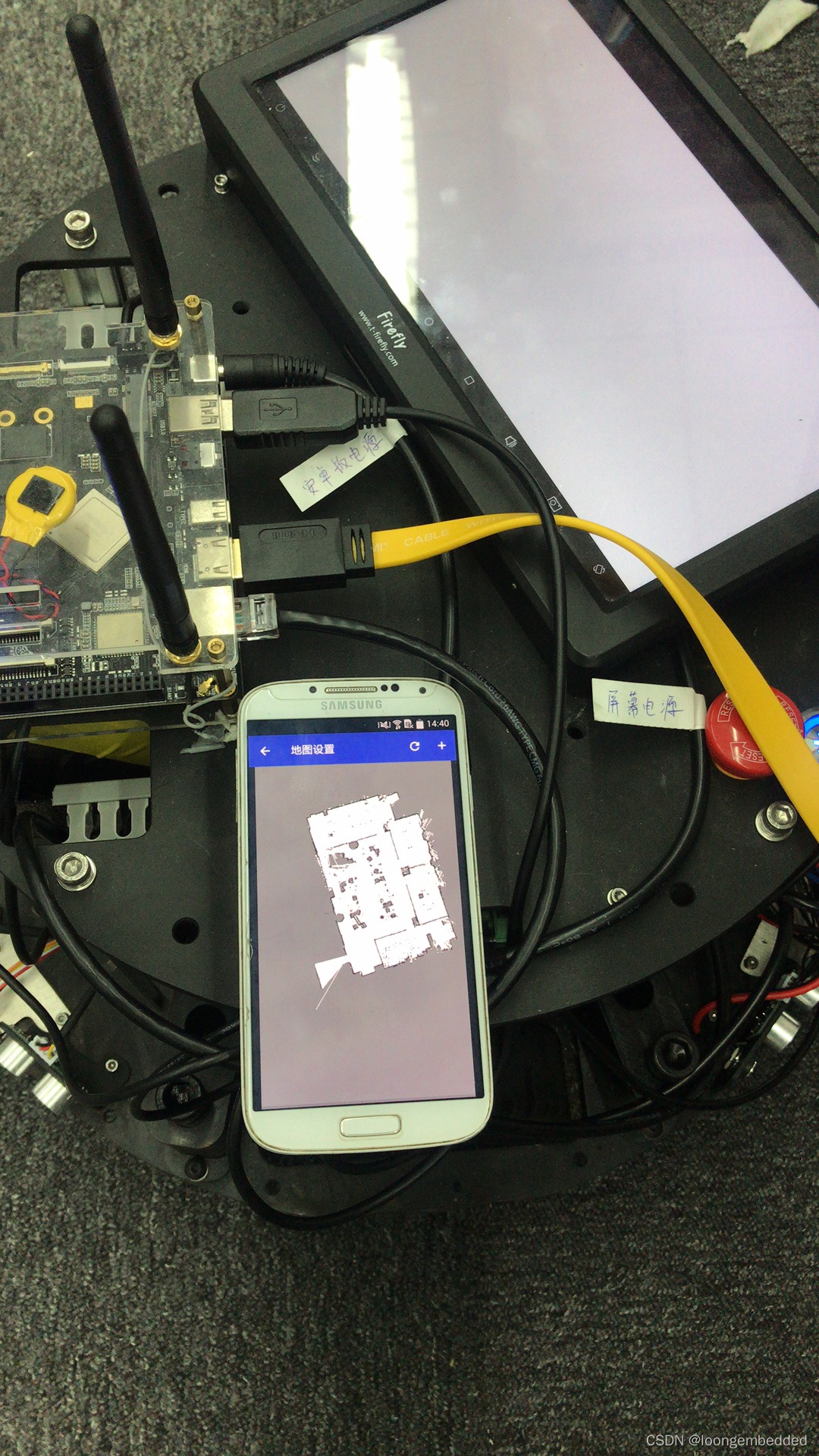
第一张是主要组成介绍,那个显示器其实没啥用,不过不接显示器你怎么知道是Android系统呢; 第二张是之前已经建好的图,还算工整; 第三张打开的建图程序,手机上显示的是激光扫出来的东西


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)