ros机器人仿真
ros机器人仿真
1、urdf->机器人的搭建,可以用xml文件表示机器人
gazebo->创建仿真环境,
rviz->感知环境三维可视化工具
2、仿真优势:低成本、高效、高安全性
3、机器人分为关节和连杆两大部分,连杆->机器人可见部分,关节->现实中的连接出的不可见的东西
=======================
urdf语法
-robot标签
-link标签
-joint标签
一、robot
urdf 中为了保证 xml 语法的完整性,使用了robot标签作为根标签,所有的 link 和 joint 以及其他标签都必须包含在 robot 标签内,在该标签内可以通过 name 属性设置机器人模型的名称
1.属性
name: 指定机器人模型的名称
2.子标签
其他标签都是子级标签
二、link
urdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性,比如: 机器人底座、轮子、激光雷达、摄像头...每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性

转存失败重新上传取消
1.属性
- name ---> 为连杆命名
2.子标签
-
visual ---> 描述外观(对应的数据是可视的)
-
geometry 设置连杆的形状
-
标签1: box(盒状)
- 属性:size=长(x) 宽(y) 高(z)
-
标签2: cylinder(圆柱)
- 属性:radius=半径 length=高度
-
标签3: sphere(球体)
- 属性:radius=半径
-
标签4: mesh(为连杆添加皮肤)
- 属性: filename=资源路径(格式:package://<packagename>/<path>/文件)
-
-
origin 设置偏移量与倾斜弧度
-
属性1: xyz=x偏移 y便宜 z偏移
-
属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)
-
-
metrial 设置材料属性(颜色)
-
属性: name
-
标签: color
- 属性: rgba=红绿蓝权重值与透明度 (每个权重值以及透明度取值[0,1])
-
-
-
collision ---> 连杆的碰撞属性
-
Inertial ---> 连杆的惯性矩阵
三、joint
urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 parent link 与 child link)以"关节"的形式相连接,不同的关节有不同的运动形式: 旋转、滑动、固定、旋转速度、旋转角度限制....,比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上。
joint标签对应的数据在模型中是不可见的
1.属性
-
name ---> 为关节命名
-
type ---> 关节运动形式
-
continuous: 旋转关节,可以绕单轴无限旋转
-
revolute: 旋转关节,类似于 continues,但是有旋转角度限制
-
prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
-
planer: 平面关节,允许在平面正交方向上平移或旋转
-
floating: 浮动关节,允许进行平移、旋转运动
-
fixed: 固定关节,不允许运动的特殊关节
-
2.子标签
-
parent(必需的)
parent link的名字是一个强制的属性:
- link:父级连杆的名字,是这个link在机器人结构树中的名字。
-
child(必需的)
child link的名字是一个强制的属性:
- link:子级连杆的名字,是这个link在机器人结构树中的名字。
-
origin
- 属性: xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。
必须加name属性的标签有:robot link joint material
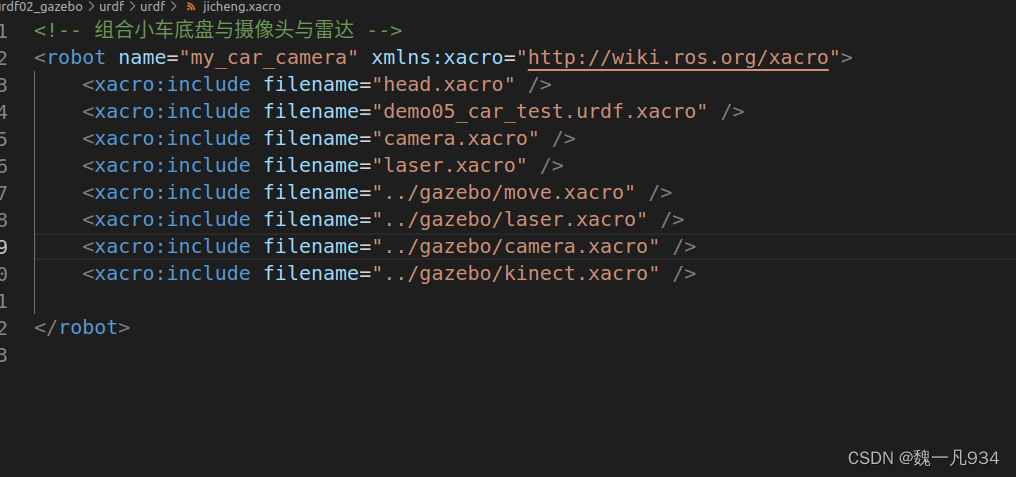
xacro可为不同组件分为不同的文件
xacro要特别注意joint的关系
rqt控制
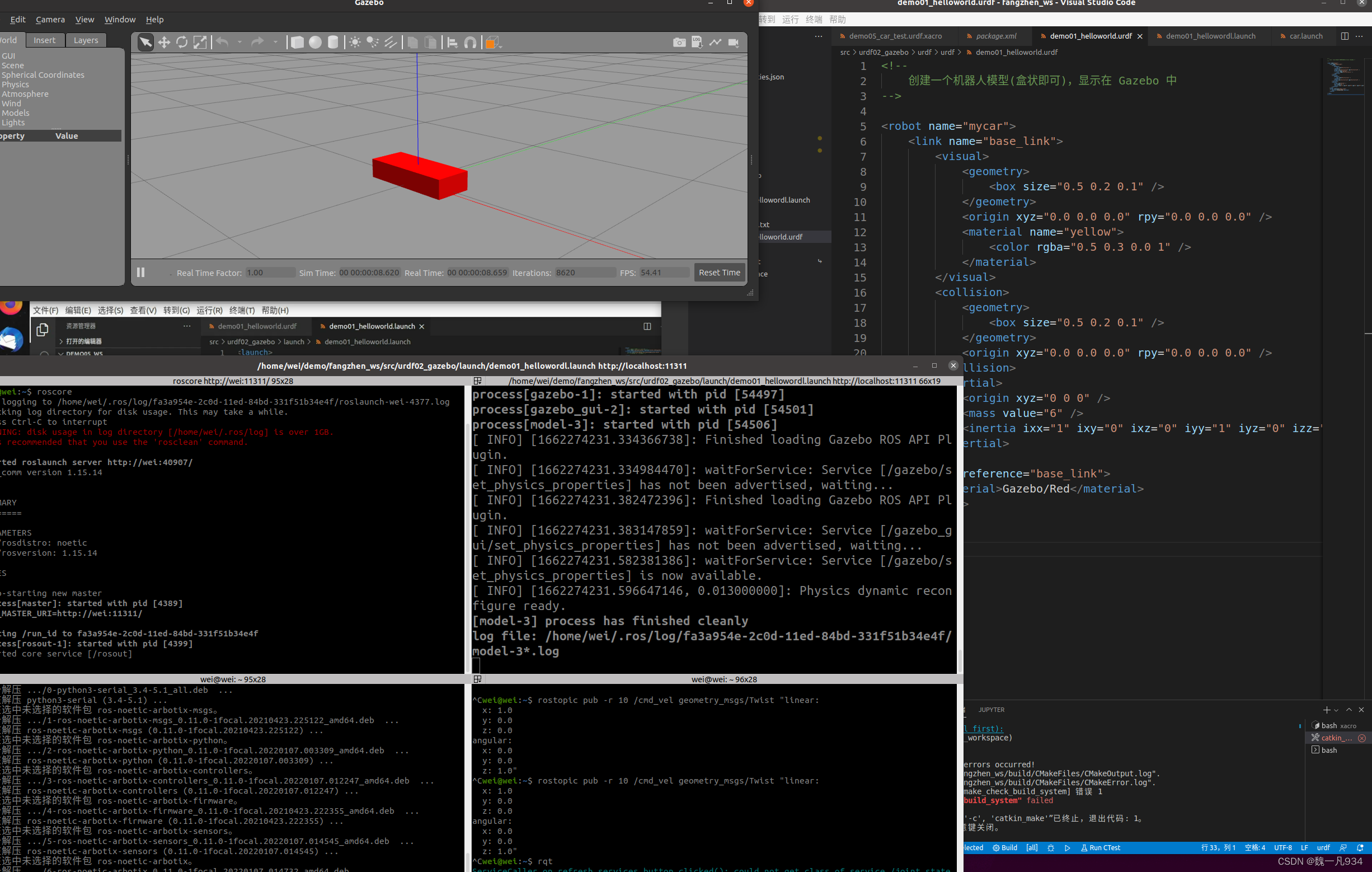
注意, 当 URDF 需要与 Gazebo 集成时,和 Rviz 有明显区别:
1.必须使用 collision 标签,因为既然是仿真环境,那么必然涉及到碰撞检测,collision 提供碰撞检测的依据。
2.必须使用 inertial 标签,此标签标注了当前机器人某个刚体部分的惯性矩阵,用于一些力学相关的仿真计算。
3.颜色设置,也需要重新使用 gazebo 标签标注,因为之前的颜色设置为了方便调试包含透明度,仿真环境下没有此选项。
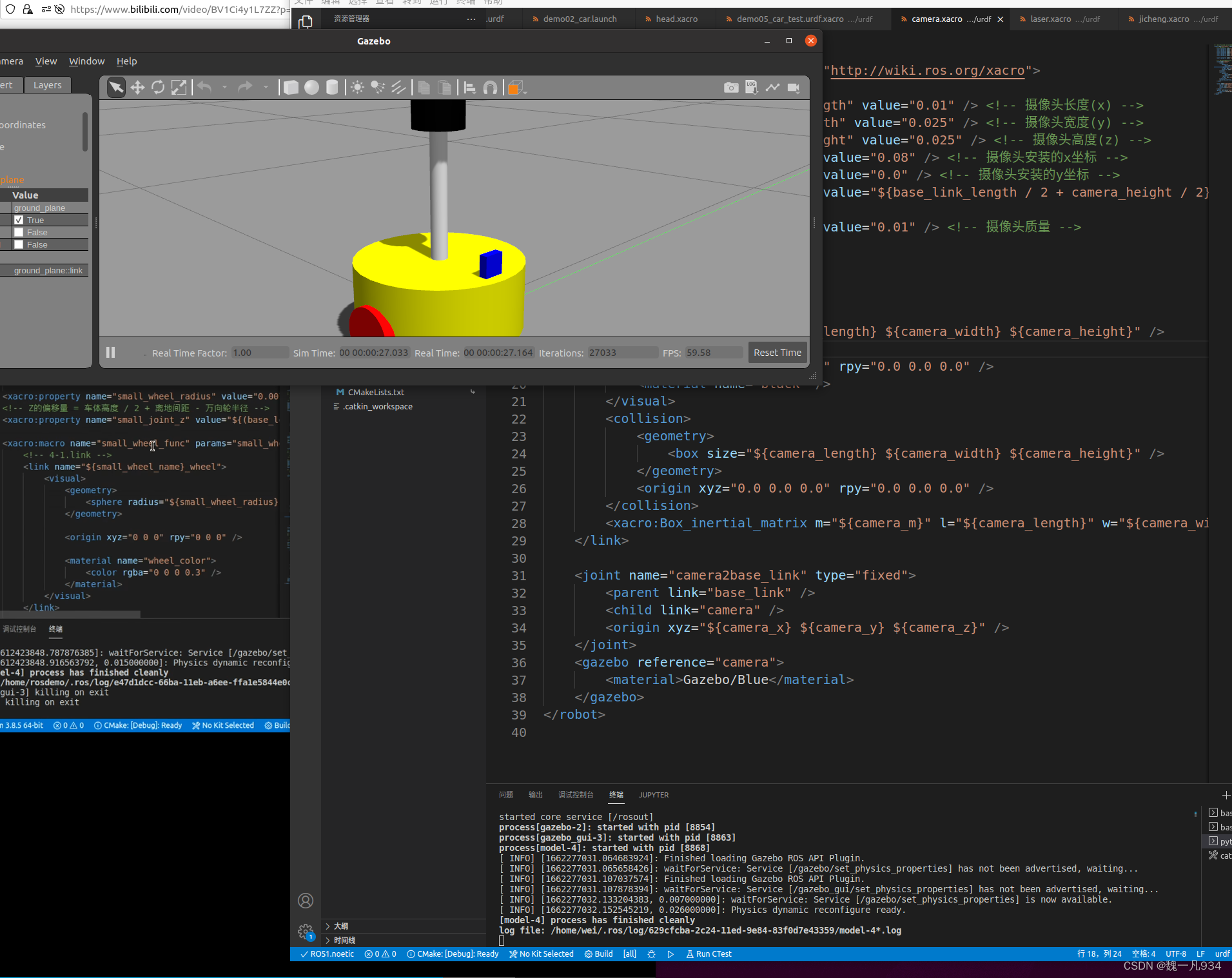
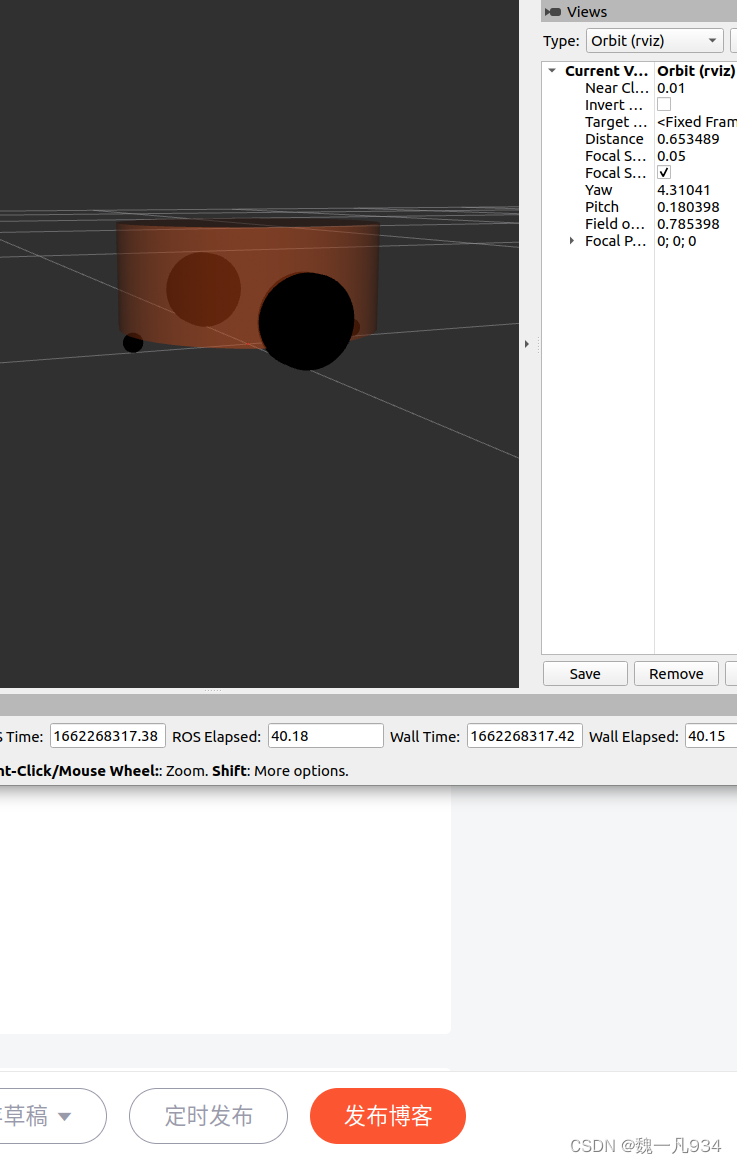
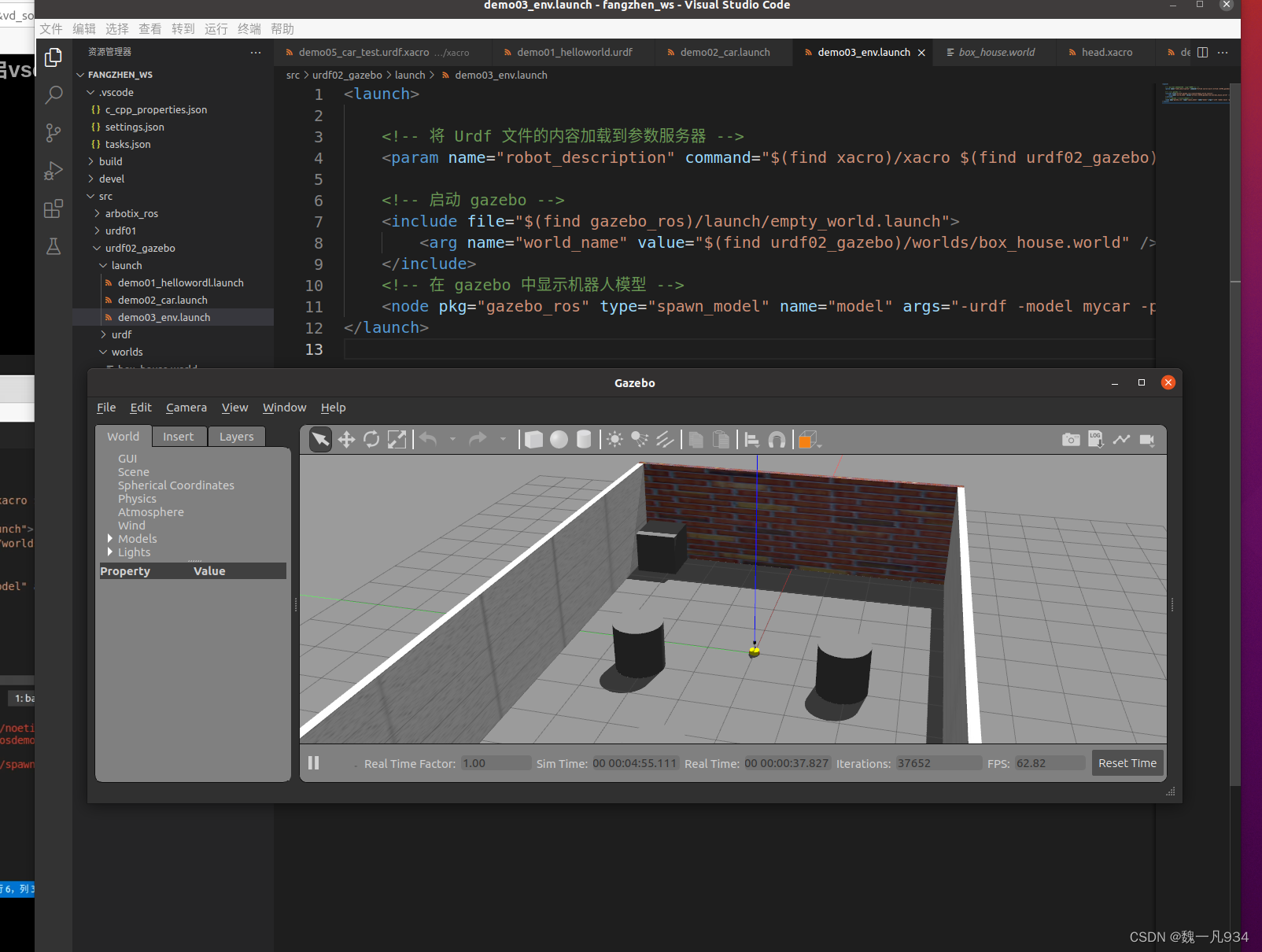
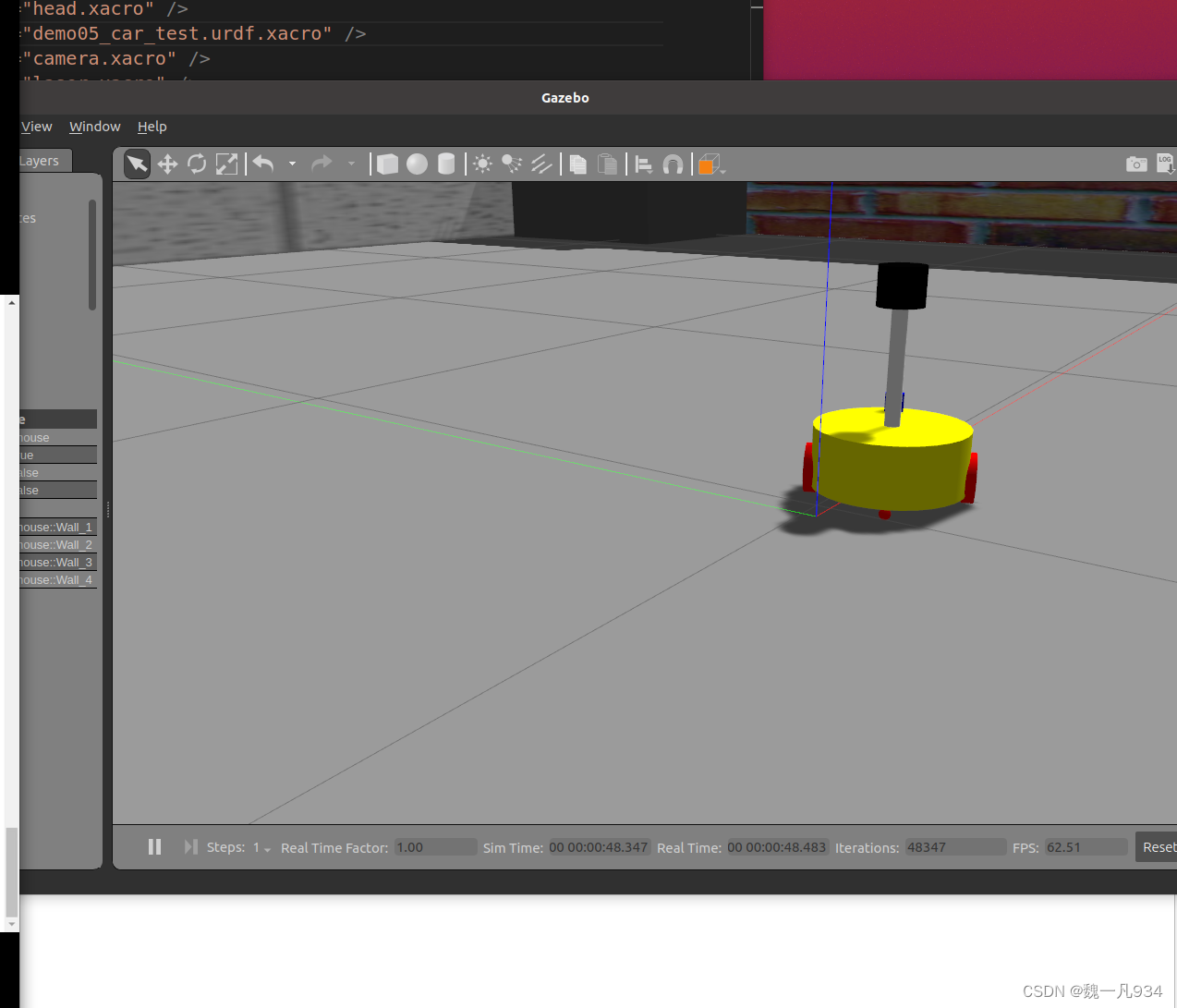
gazebo显示小车
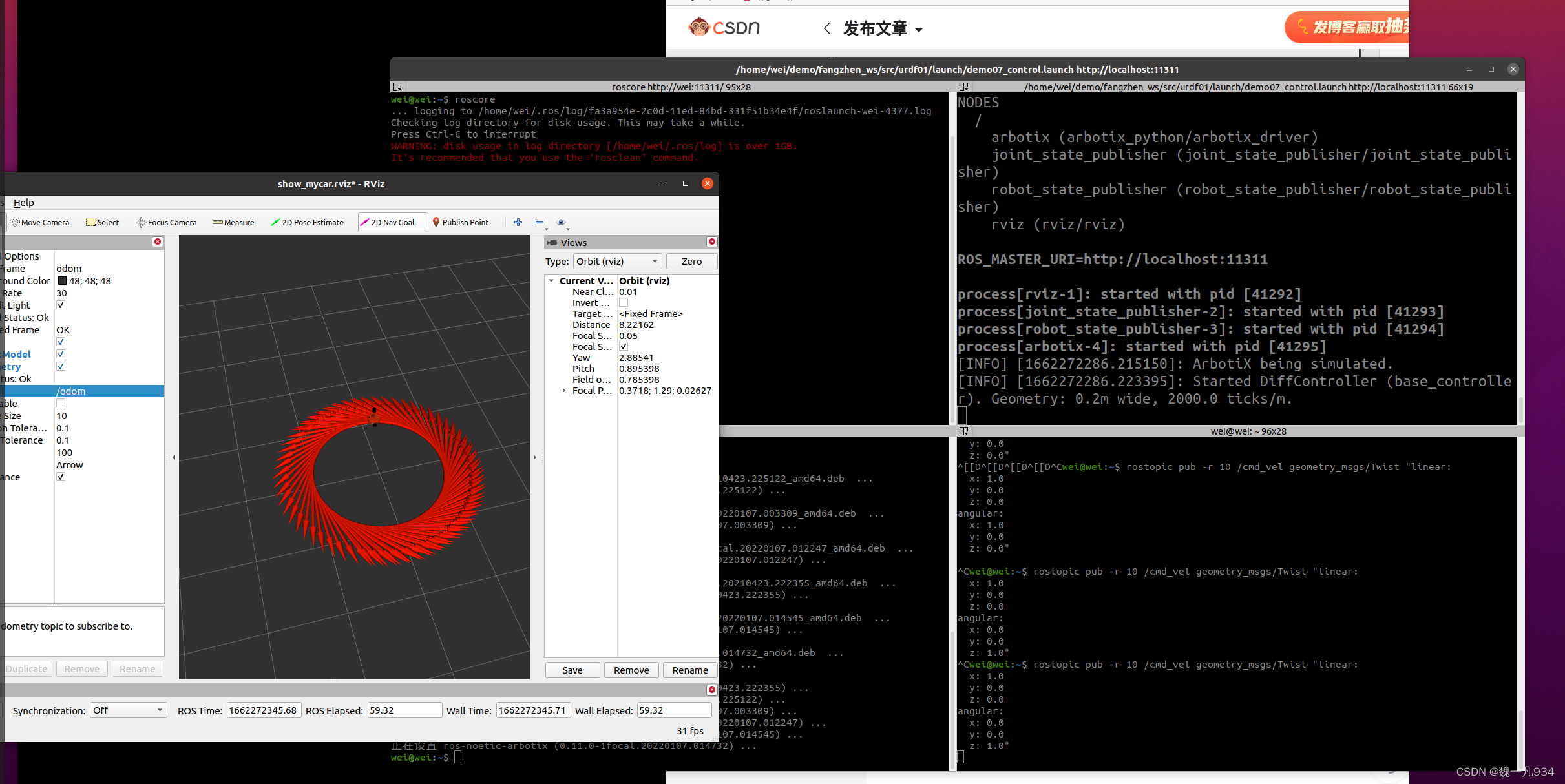
差速
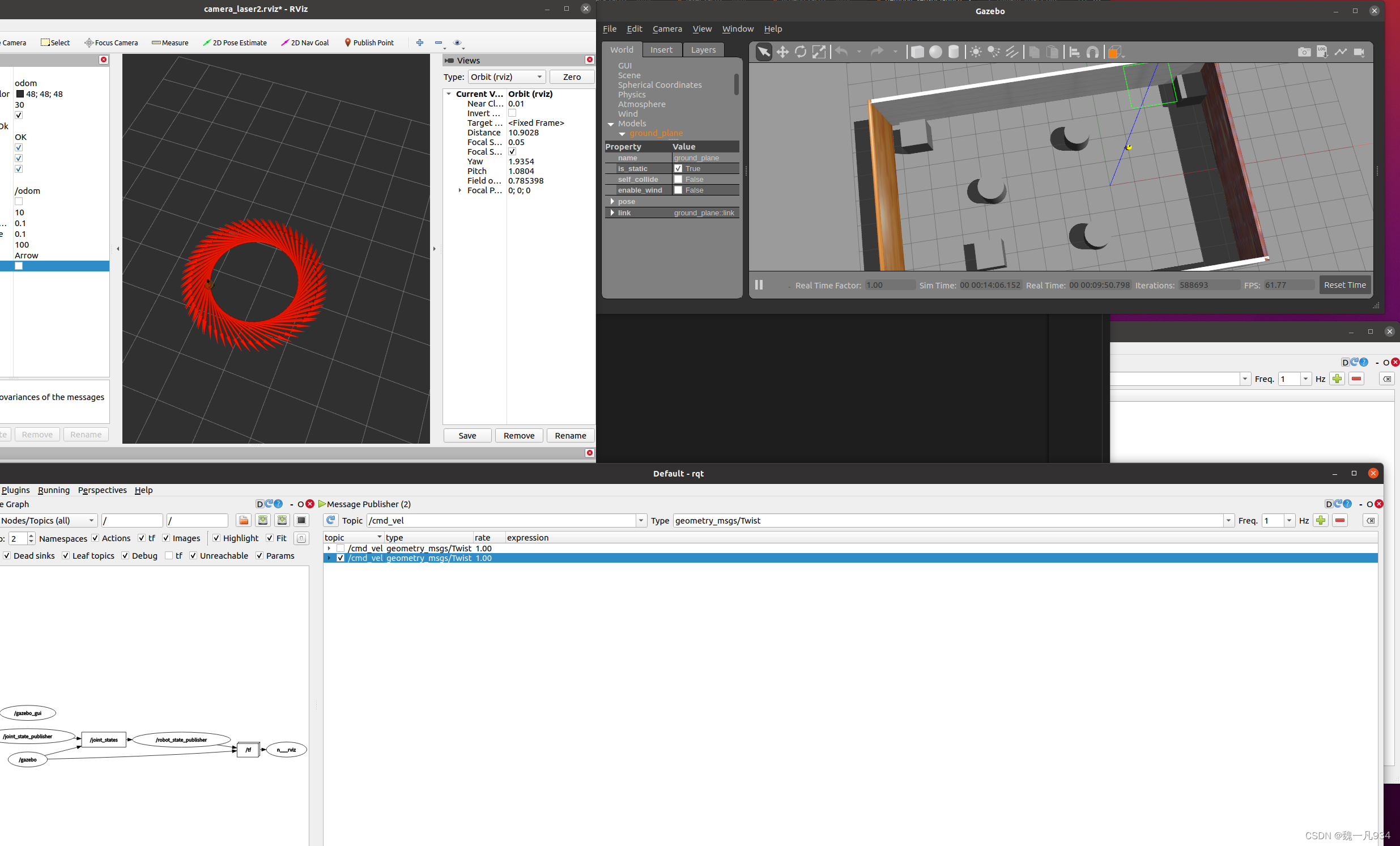
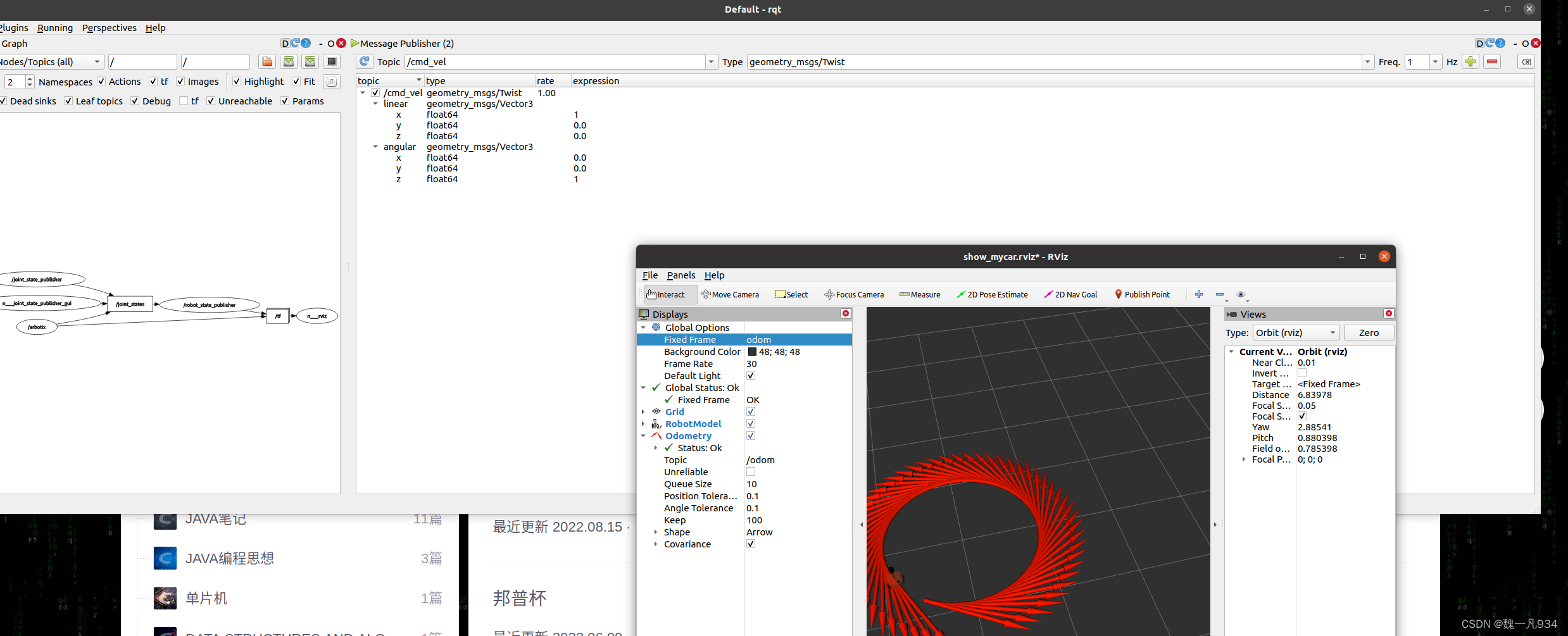
联合仿真,rqt发布
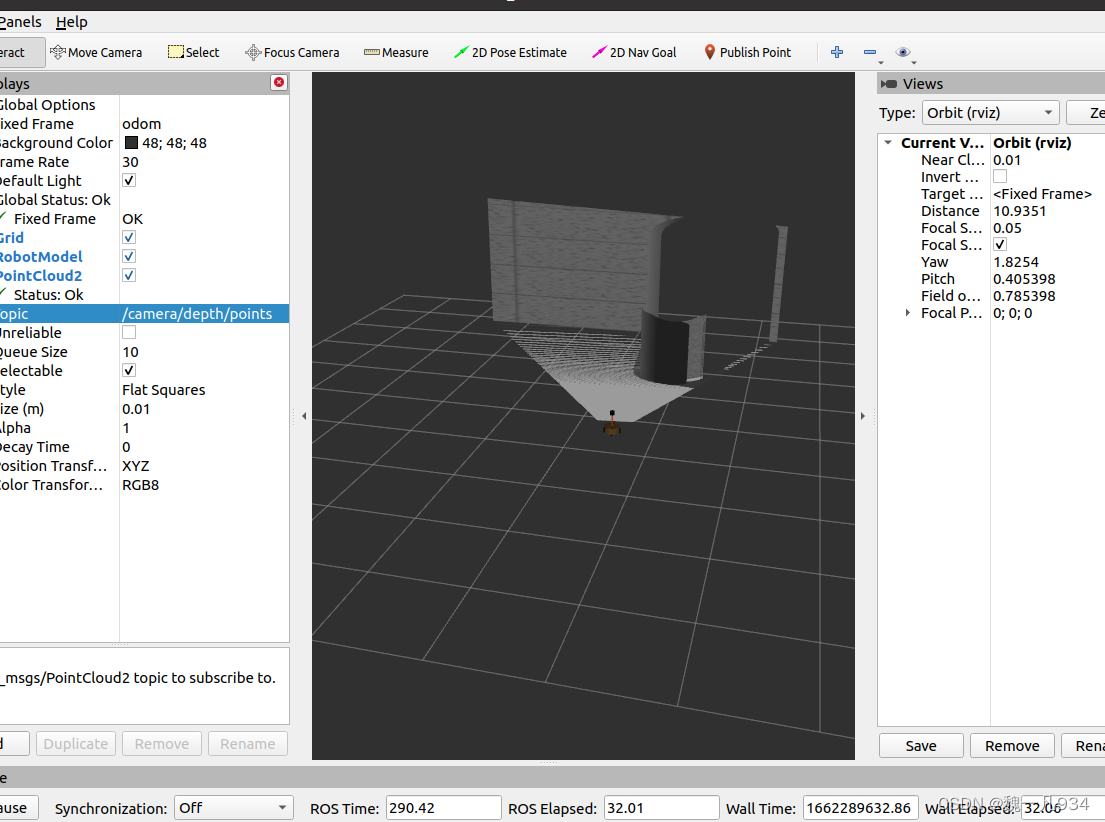
pointcloud 2

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)