PX4水下机器人源码分析
一、Px4版本1.14.1机型文件
PX4Autopilotmain\ROMFS\px4fmu_common\init.d\airframes路径下
这个脚本设置了BlueROV2(重型配置)的各种参数和初始化步骤,包括电池设置、通信设置、机架和旋翼配置以及PWM输出功能的映射。通过这些设置,可以确保机器人在启动时加载正确的配置,并按照预期的方式运行
# 加载默认的UUV配置
. ${R}etc/init.d/rc.uuv_defaults
# 设置参数
|
param |
set-default |
|
CBRK_IO_SAFETY |
22027 |
|
MAV_1_CONFIG |
102 |
|
BAT1_A_PER_V |
37.8798 |
|
BAT1_CAPACITY |
18000 |
|
BAT1_V_DIV |
11 |
|
BAT1_N_CELLS |
4 |
|
BAT_V_OFFS_CURR |
0.33 |
# 机架和旋翼配置
|
param |
set-default |
|
CA_AIRFRAME |
7 |
|
CA_ROTOR_COUNT |
8 |
|
CA_R_REV |
255 |
# 旋翼0参数
|
param |
set-default |
|
CA_ROTOR0_AX |
1 |
|
CA_ROTOR0_AY |
-1 |
|
CA_ROTOR0_AZ |
0 |
|
CA_ROTOR0_KM |
0 |
|
CA_ROTOR0_PX |
0.5 |
|
CA_ROTOR0_PY |
0.3 |
|
CA_ROTOR0_PZ |
0.2 |
# 旋翼1参数
|
param |
set-default |
|
CA_ROTOR1_AX |
1 |
|
CA_ROTOR1_AY |
1 |
|
CA_ROTOR1_AZ |
0 |
|
CA_ROTOR1_KM |
0 |
|
CA_ROTOR1_PX |
0.5 |
|
CA_ROTOR1_PY |
-0.3 |
|
CA_ROTOR1_PZ |
0.2 |
# 旋翼2参数
|
param |
set-default |
|
CA_ROTOR2_AX |
1 |
|
CA_ROTOR2_AY |
1 |
|
CA_ROTOR2_AZ |
0 |
|
CA_ROTOR2_KM |
0 |
|
CA_ROTOR2_PX |
-0.5 |
|
CA_ROTOR2_PY |
0.3 |
|
CA_ROTOR2_PZ |
0.2 |
# 旋翼3参数
|
param |
set-default |
|
CA_ROTOR3_AX |
1 |
|
CA_ROTOR3_AY |
-1 |
|
CA_ROTOR3_AZ |
0 |
|
CA_ROTOR3_KM |
0 |
|
CA_ROTOR3_PX |
-0.5 |
|
CA_ROTOR3_PY |
-0.3 |
|
CA_ROTOR3_PZ |
0.2 |
# 旋翼4参数
|
param |
set-default |
|
CA_ROTOR4_AZ |
-1 |
|
CA_ROTOR4_KM |
0 |
|
CA_ROTOR4_PX |
0.5 |
|
CA_ROTOR4_PY |
0.5 |
# 旋翼5参数
|
param |
set-default |
|
CA_ROTOR5_AZ |
1 |
|
CA_ROTOR5_KM |
0 |
|
CA_ROTOR5_PX |
0.5 |
|
CA_ROTOR5_PY |
-0.5 |
# 旋翼6参数
|
param |
set-default |
|
CA_ROTOR6_AZ |
1 |
|
CA_ROTOR6_KM |
0 |
|
CA_ROTOR6_PX |
-0.5 |
|
CA_ROTOR6_PY |
0.5 |
# 旋翼7参数
|
param |
set-default |
|
CA_ROTOR7_KM |
0 |
|
CA_ROTOR7_PX |
-0.5 |
|
CA_ROTOR7_PY |
-0.5 |
# PWM功能映射
|
param |
set-default |
|
PWM_MAIN_FUNC1 |
101 |
|
PWM_MAIN_FUNC2 |
102 |
|
PWM_MAIN_FUNC3 |
103 |
|
PWM_MAIN_FUNC4 |
104 |
|
PWM_MAIN_FUNC5 |
105 |
|
PWM_MAIN_FUNC6 |
106 |
|
PWM_MAIN_FUNC7 |
107 |
|
PWM_MAIN_FUNC8 |
108 |
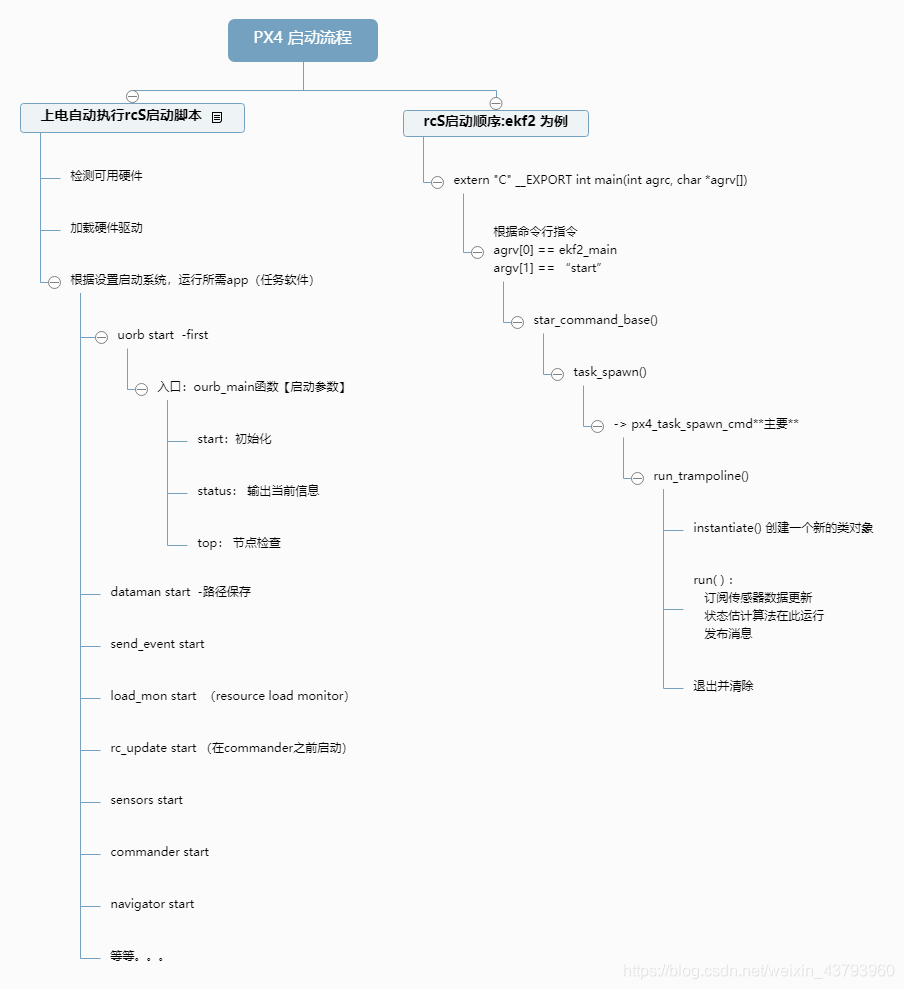
二、Rcs启动脚本
启动脚本是一个神奇的东西,它能够识别出你对应的飞机类型,加载对应的混控器,选择对应的姿态、位置估计程序以及控制程序,初始化你需要的驱动程序。
启动脚本实现了挂载SD卡,设置存储好的飞行控制初始参数(可以通过地面站修改),启动所有外设传感器,启动与地面站通行的Mavlink服务,以及机型的选择后对应启动的控制服务(以uuv为例,启动了ekf2,uuv_att_control,uuv_pos_control等服务),打开navigator服务。
启动机架代码
# Configure vehicle type specific parameters.
# Note: rc.vehicle_setup is the entry point for all vehicle type specific setup.
. ${R}etc/init.d/rc.vehicle_setup进入rc.vehicle_setup 后,可以看到有一个机型判断
# UUV setup
#
if [ $VEHICLE_TYPE = uuv ]
then
# Start standard vtol apps.
. ${R}etc/init.d/rc.uuv_apps
fi然后进入rc.uuv.app
# Start Control Allocator
#
control_allocator start
#
# Start UUV Attitude Controller.
#
uuv_att_control start
#
# Start UUV Land Detector.
#
land_detector start rover可以看到启动控制分配器、UUV姿态控制器和UUV着陆检测器的命令。
三、然后我们进入到uuv_att_control.h
先来看它的头文件,uuv_att_control.h定义了一个名为 UUVAttitudeControl的类,它继承了ModuleBase、ModuleParams 和 px4::WorkItem。
公有成员函数
- 构造函数和析构函数
UUVAttitudeControl(); ~UUVAttitudeControl(); );- 任务启动
static int task_spawn(int argc, char *argv[]);- 定义命令
static int custom_command(int argc, char *argv[]);-
打印用法
static int print_usage(const char *reason = nullptr);-
初始化函数
bool init();私有成员函数
-
发布扭矩设定点
void publishTorqueSetpoint(const hrt_abstime ×tamp_sample);-
发布推理设定点
void publishThrustSetpoint(const hrt_abstime ×tamp_sample);-
运行函数(主要控制逻辑)
void Run() override;-
参数更新
void parameters_update(bool force = false);-
姿态控制
void control_attitude_geo(const vehicle_attitude_s &attitude, const vehicle_attitude_setpoint_s &attitude_setpoint, const vehicle_angular_velocity_s &angular_velocity, const vehicle_rates_setpoint_四、然后我们进入到uuv_att_control.cpp
1、函数constrain_actuator_commands
用于约束并设置姿态控制和推力控制的命令,以确保这些命令在合理的范围内。具体地说,它处理滚转(roll)、俯仰(pitch)、偏航(yaw)以及在 x、y、z 方向上的推力(thrust)的控制命令。以其中一个举例:
检查滚转命令(roll_u)
if (PX4_ISFINITE(roll_u)) {
roll_u = math::constrain(roll_u, -1.0f, 1.0f);4. _vehicle_torque_setpoint.xyz[0] = roll_u;
} else {
_vehicle_torque_setpoint.xyz[0] = 0.0f;
}- 首先检查roll_u是否为有限值(不是无穷大或NaN)
- 如果是有限值,则将roll_u约束在 [-1.0, 1.0] 范围内,并设置为车辆的滚转扭矩设定点。
- 如果不是有限值,则将滚转扭矩设定点设置为 0。
2、control_attitude_geo函数,使用比例和微分控制器调节水下机器人的姿态。
通过计算姿态误差和角速度误差,生成控制力矩,并结合推力设定值,生成最终的控制命令。通过 constrain_actuator_commands 函数,将这些命令约束在合理范围内,以确保机器人的稳定性和安全性。
1)从四元数提取姿态和设定值
Eulerf euler_angles(matrix::Quatf(attitude.q));
float roll_body = attitude_setpoint.roll_body;
float pitch_body = attitude_setpoint.pitch_body;
float yaw_body = attitude_setpoint.yaw_body;
float roll_rate_desired = rates_setpoint.roll;
float pitch_rate_desired = rates_setpoint.pitch;
float yaw_rate_desired = rates_setpoint.yaw;- 将姿态四元数转换为欧拉角。
- 提取设定的姿态(滚转、俯仰、偏航)和角速度。
2)计算旋转矩阵
/* get attitude setpoint rotational matrix */
Dcmf rot_des = Eulerf(roll_body, pitch_body, yaw_body);
/* get current rotation matrix from control state quaternions */
Quatf q_att(attitude.q);
Matrix3f rot_att = matrix::Dcm<float>(q_att);
;- 将设定的欧拉角转换成旋转矩阵rot_des。
-
将当前姿态四元数转换为旋转矩阵rot_att。
3)计算姿态误差
/* Compute matrix: attitude error */
Matrix3f e_R = (rot_des.transpose() * rot_att - rot_att.transpose() * rot_des) * 0.5;
/* vee-map the error to get a vector instead of matrix e_R */
e_R_vec(0) = e_R(2, 1); /**< Roll */
e_R_vec(1) = e_R(0, 2); /**< Pitch */
e_R_vec(2) = e_R(1, 0); /**< Yaw */- e_R(2, 1)表示矩阵e_R的第3行第2列元素。
- 计算姿态误差矩阵e_R该矩阵表示当前姿态与期望姿态之间的误差。
- 使用vee-map将误差矩阵转换为误差向量e_R_vec分别对应滚转、俯仰和偏航的误差。
4)计算角速度误差并应用PD控制器
/**< P-Control */
torques(0) = - e_R_vec(0) * _param_roll_p.get(); /**< Roll */
torques(1) = - e_R_vec(1) * _param_pitch_p.get(); /**< Pitch */
torques(2) = - e_R_vec(2) * _param_yaw_p.get(); /**< Yaw */
/**< PD-Control */
torques(0) = torques(0) - omega(0) * _param_roll_d.get(); /**< Roll */
torques(1) = torques(1) - omega(1) * _param_pitch_d.get(); /**< Pitch */
torques(2) = torques(2) - omega(2) * _param_yaw_d.get(); /**< Yaw */
float roll_u = torques(0);
float pitch_u = torques(1);
float yaw_u = torques(2);
// take thrust as
float thrust_x = attitude_setpoint.thrust_body[0];
float thrust_y = attitude_setpoint.thrust_body[1];
float thrust_z = attitude_setpoint.thrust_body[2];- 计算当前角度与设定角度之间的误差omega。
- 通过P控制器计算初步的控制力矩。
- 通过PD控制器(比例微分控制器)调整控制力矩。
五、提取推力设定值并约束控制命令
constrain_actuator_commands(roll_u, pitch_u, yaw_u, thrust_x, thrust_y, thrust_z);
/* Geometric Controller END*/
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 25
25 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)