kuka机器人外部轴异步_(技术)机器人维保10个常见问题解答
A1:Kuka机器人无法连接KRC(如图1)?Q1:购买一个如下备份U盘(如图2)机器人开机的时候机器人主机硬盘镜像备份(跟电脑做镜像备份一样),若系统或者网络错误等可以直接还原镜像备份。A2:具体怎样判断是电机,编码器,抱闸故障Q2:首先根据报警提示找故障,有些故障报警提示很明确,例如编码器电源缺失,电机过热,等等如果无法通过报警直接确定A3:在调试库卡机器人,配置外部信号时机器人示教器界面..

A1:Kuka机器人无法连接KRC(如图1)?

Q1:
- 购买一个如下备份U盘(如图2)
- 机器人开机的时候机器人主机硬盘镜像备份(跟电脑做镜像备份一样),若系统或者网络错误等可以直接还原镜像备份。
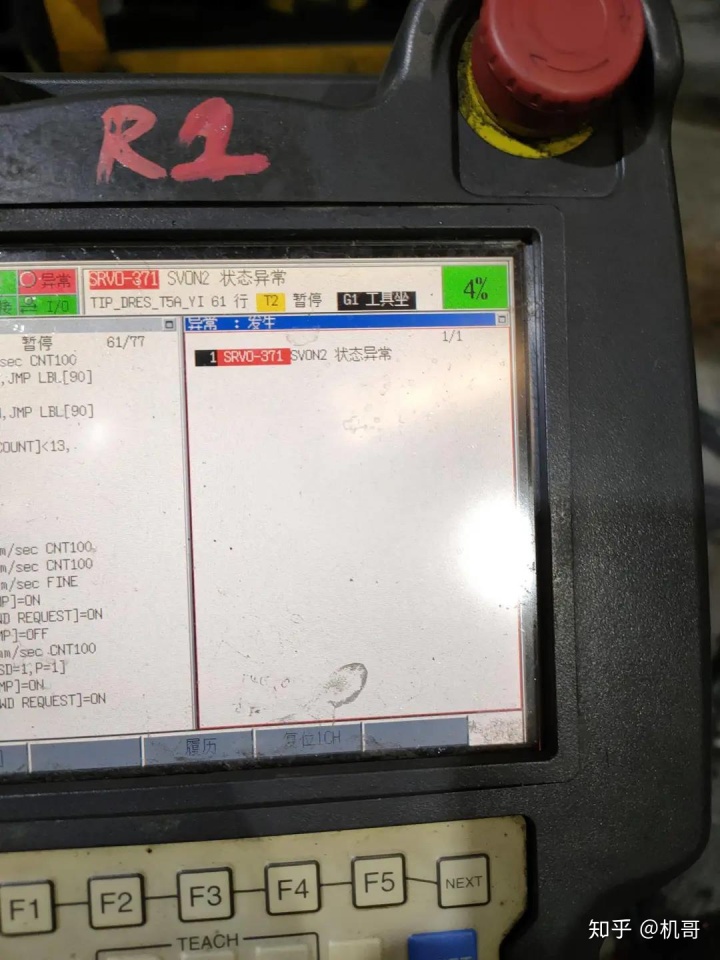
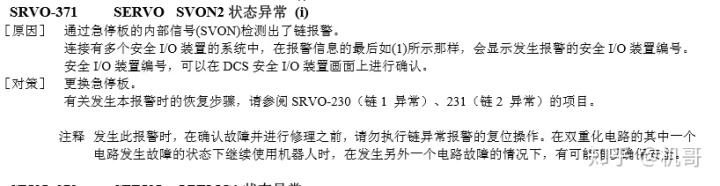
A2:具体怎样判断是电机,编码器,抱闸故障
Q2:首先根据报警提示找故障,有些故障报警提示很明确,例如编码器电源缺失,电机过热,等等 如果无法通过报警直接确定

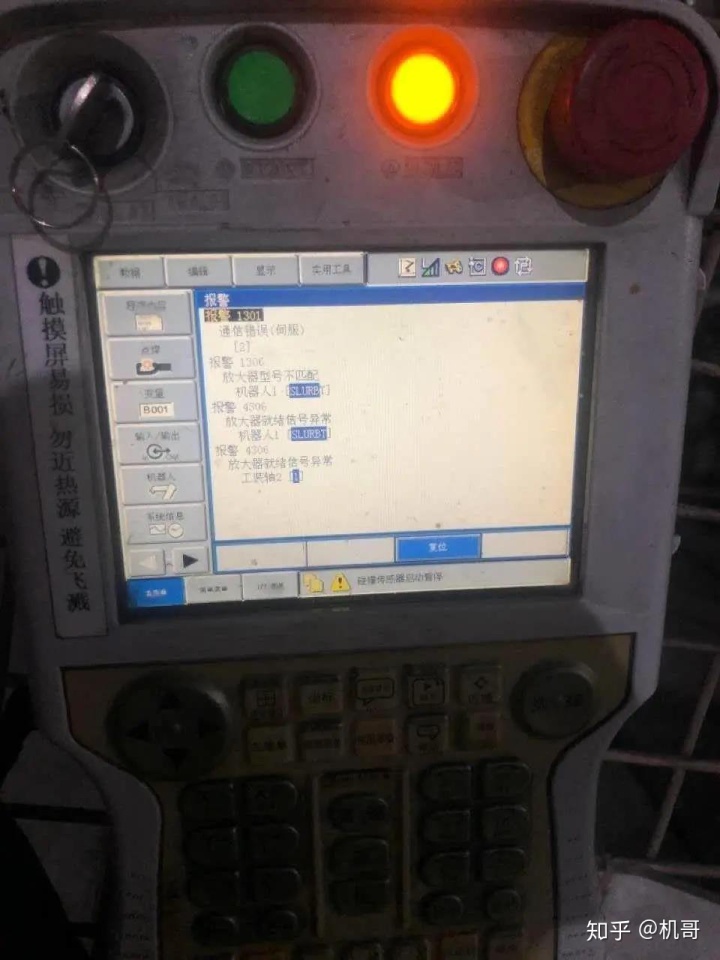
A3:在调试库卡机器人,配置外部信号时机器人示教器界面卡住无反应,重启后就报图片中的报警
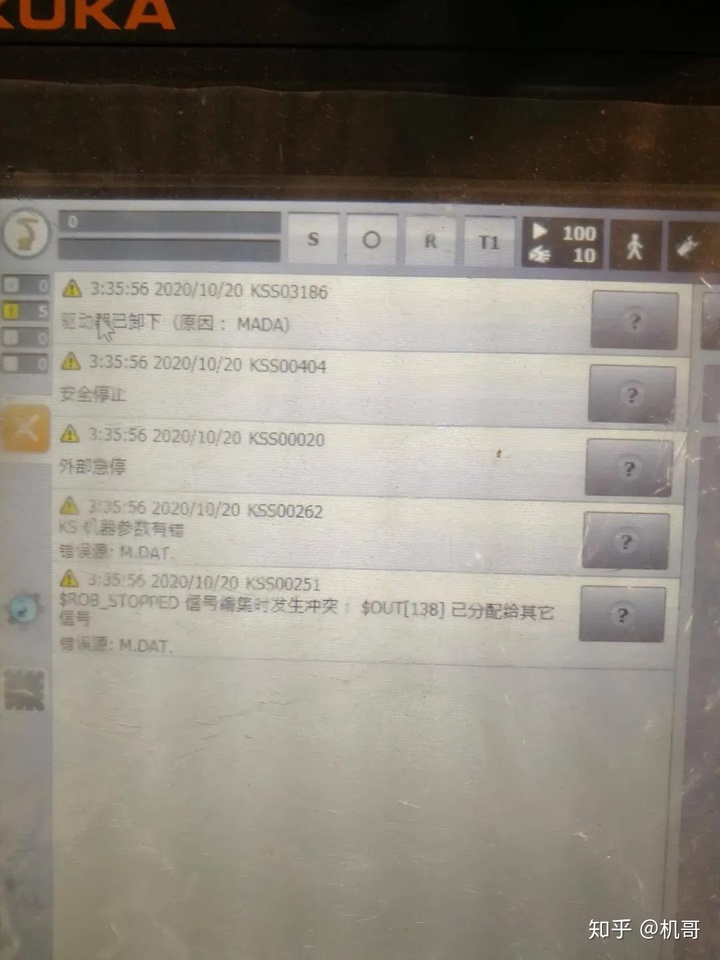
Q3:通过图片上的报错信息看到你在配置信号的时候输出端138号口和其他信号有重复使用的,先把这个重复的信号重新配置下看看,然后其他的报错最好能把你配置的详细界面发过来或者程序备份发过来看下。
A4:X44通讯报警
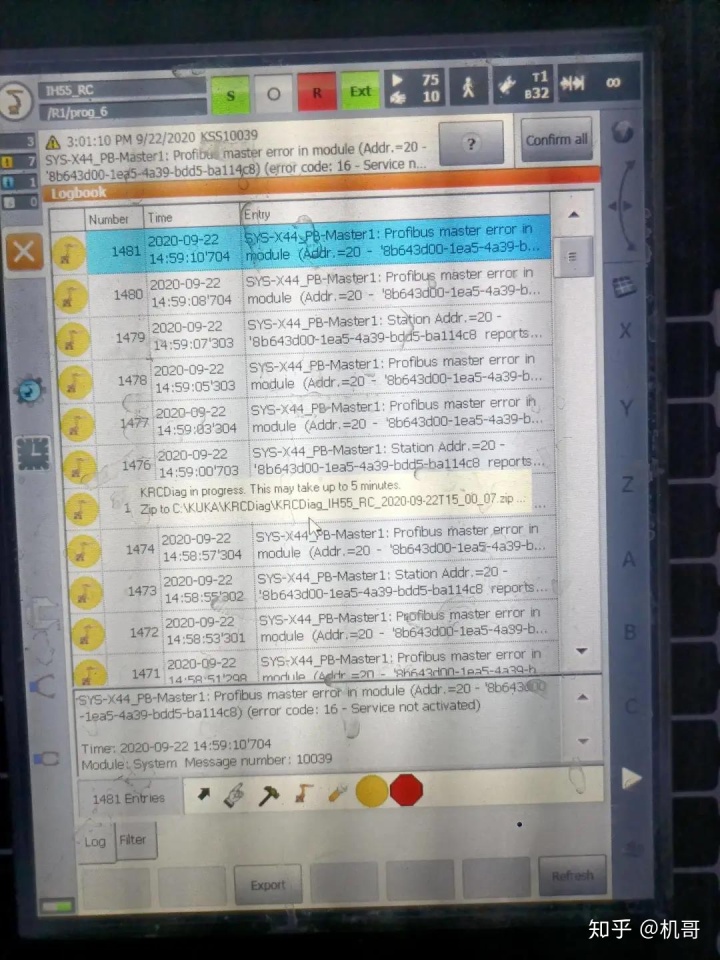
Q4:板卡配置错误
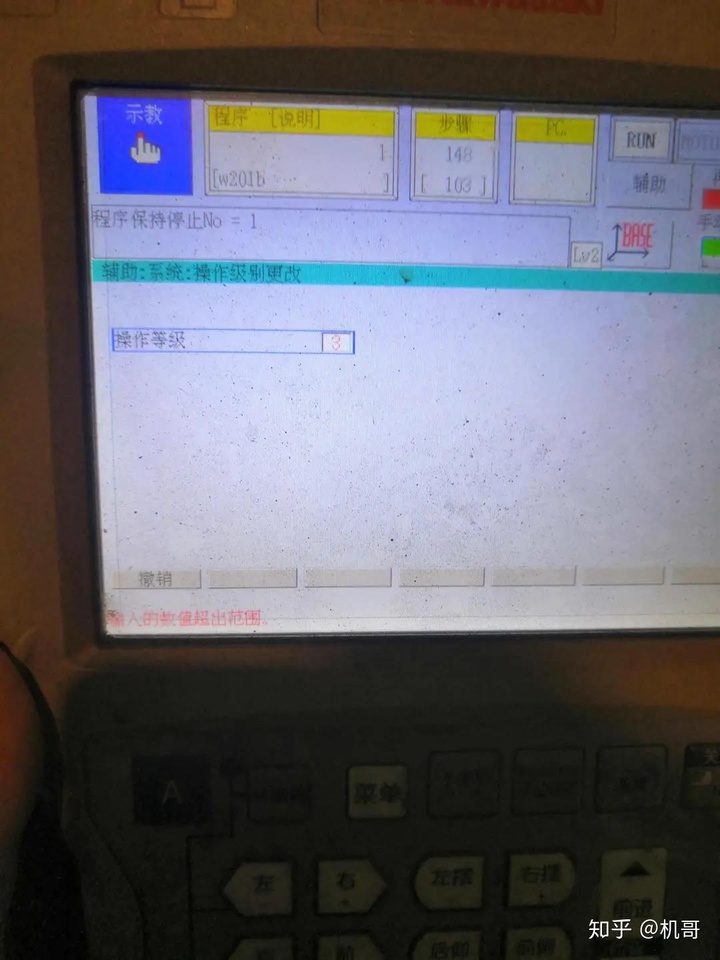
A5:安川机器人用户坐标和发那科的用户坐标有那些不同
Q5:机器人的用户坐标原理都是一样的,只不过不同的机器人他们的叫法不一样而已。
A6:做系统与电气信号配对
Q6:是否是外部自动。外部自动的话基本需要机器人就绪,机器人在外部自动状态,机器人复位,程序运行,机器人停止,机器人在原点等信号。每款机器人所需要的外部信号并不一致,如果有对应型号的机器人需要打外部自动,可以到指南车APP上提出问题会有工程师详细回答。
A7:安川机器人第七轴(焊钳)伺服控制板用7-8小时后烧毁,换3块原因没有找到
Q7:重新给焊钳做焊接压力标定排除焊钳伺服电机用错误的负载去控制焊钳压力
A8:电机电流错误,有更换过驱动器,一段时间以后又出现这个问题
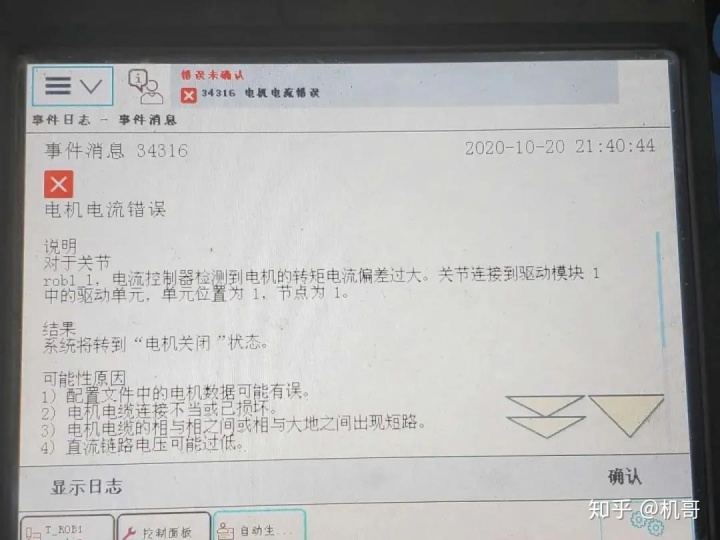
Q8:首先排查一下驱动单元上的线缆连接是否正常;
如果有备件建议更换一下驱动单元,判断一下是否为驱动单元故障;
如果驱动正常,线缆连接正常,再排查电机动力线连接是否正常以及电机本身是否正常。
A9:机器人报警。不能复位。重启OK
Q9:
A10:IRB2600.IRB6700换油时各轴度数
Q10:
ABB 机器人换油时,对机器人姿态没有严格的要求,但是有两个原则,一个是方便操作,第二个是,出油口位置要在注油口的下方。
作者:指南车朱老师

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)