NAVSIM数据集---Data-Driven Non-Reactive Autonomous Vehicle Simulation and Benchmarking
Non-Reactive仿真是一种基于真实数据的自动驾驶算法评估方法,其核心特点是在仿真过程中,环境中的其他车辆和行人不会对自动驾驶车辆(AV)的决策做出反应。这种仿真方法通过短期固定规划(如4秒)来评估AV的行驶轨迹,并在简化的鸟瞰图视角下进行。评估指标PDMS(Planning Decision Making Score)由惩罚项和加权平均项组成,其中惩罚项(如无碰撞NC和可行驶区域合规性DA
Non-Reactive如何理解?
1、基于真实数据: 算法的输入仍然是真实世界采集的传感器数据(比如某一时刻的摄像头图像、雷达点云)。
2、短期固定规划: 算法根据这一刻的输入,规划出未来一小段时间(比如4秒)的行驶轨迹。
3、环境“不理你”: 在这4秒的仿真里,环境中的其他车辆、行人等,会完全按照它们在原始数据记录中的方式运动,就好像你的车不存在,或者你的车没有做出任何新的规划一样。它们不会因为你的算法规划了变道而减速,也不会因为你的算法规划了刹车而从你旁边超过去。你的算法的决策不会影响环境中其他物体的行为。
4、鸟瞰图抽象: 仿真在一个简化的鸟瞰图(Bird’s Eye View, BEV)视角下进行。
指标

简单来说,就是:
PDMS = (所有惩罚项分数的乘积) × (多个目标项的加权平均分) 【惩罚项至关重要】
如果任何一个“惩罚项”的得分很低(尤其是0),那么总的PDMS就会变得很低(甚至是0),无论“加权平均项”里的其他表现有多好。这体现了安全是驾驶的首要前提。
Penalties(惩罚项)
绝对不能违反的硬性规则(比如安全和基本合规性)。这些项是相乘的,一旦某一项为0,整个PDMS就为0
NC (No Collision - 无碰撞): 评价AV是否与其他交通参与者或物体发生碰撞。
1、score_NC = 0: 如果AV与道路使用者(如其他车辆、行人、自行车)发生碰撞。
案例1(与
车辆碰撞): AV计划变道,但在其4秒的模拟轨迹中,它在第2.5秒时与侧方车道正常行驶的另一辆车(该车在NAVSIM中按其原始记录轨迹行驶,不理会AV)发生了重叠。此时 score_NC = 0,导致该场景的 PDMS 直接为 0。
案例2(与行人碰撞): AV计划右转通过人行横道,但其模拟轨迹在第3秒时撞到了一个正在按原始记录过马路的行人。此时 score_NC = 0,PDMS 为 0。
2、score_NC = 0.5: 如果AV与静态物体(如路边的树、电线杆、停放的车辆)发生碰撞。这被认为是一个较轻的惩罚
案例3(与
静态物体碰撞): AV在路边停车,规划的轨迹过于贴近路肩,其模拟车身在第2秒时剐蹭到了一个消防栓。此时 score_NC = 0.5。如果其他惩罚项都是1,那么最终PDMS至少会减半。
3、score_NC = 1: 在4秒的模拟规划中,没有发生任何碰撞。
特殊情况: 论文提到会忽略某些不被认为是AV“过错”的碰撞,例如
AV完全静止时被追尾(尽管在非反应式仿真中,其他车辆也是按固定轨迹行驶,这种情况可能较少或有特定定义)。
DAC (Drivable Area Compliance - 可行驶区域合规性): 评价AV是否一直保持在规定的可行驶区域内。
1、score_DAC = 0: 如果AV的模拟轨迹有任何部分驶出了可行驶区域(例如,开上了人行道、中央隔离带、逆行车道等)。
案例1(驶出路面): AV在转弯时速度过快或路径规划不当,其模拟轨迹显示车辆在第2秒时冲上了路肩或人行道。此时 score_DAC = 0,导致该场景的 PDMS 直接为 0。
案例2(严重违规变道): AV为了超车,规划的轨迹长时间压实线行驶或进入了禁止驶入的区域。此时 score_DAC = 0,PDMS 为 0。
2、score_DAC = 1: AV在4秒的模拟规划中,完全保持在合法的可行驶区域内。
Weighted Average (加权平均项)
EP (Ego Progress - 自车进展): 衡量AV沿着规划路线有效前进的程度。
权重 weight_EP = 5。
得分 score_EP 是AV实际进展与一个“安全进展上限”(由一个名为PDM-Closed的基于规则的规划器估算得出,代表在该场景下安全、合理的最大进展)的比值,结果会被限制在[0, 1]之间。如果这个上限太低(比如小于5米),这个分数可能不作考虑。
案例1(进展良好):AV的任务是直行通过一段30米长的路。PDM-Closed估算出在此4秒内,安全进展上限是25米。AV规划的轨迹实际前进了22米。那么score_EP = 22 / 25 = 0.88。
案例2(进展不足):同样是直行30米的任务,安全进展上限25米。但AV规划得非常保守,只前进了5米。那么 score_EP = 5 / 25 = 0.2。
案例3(无法进展/进展为负): 如果AV规划倒车或原地不动,而任务是前进,那么EP得分会很低或为0。
TTC (Time-to-Collision - 碰撞时间): 确保AV与其他车辆保持足够的安全距离,通常是向前车。
权重 weight_TTC = 5。score_TTC 默认值为1(表示安全)。如果在4秒模拟的任何时间点,AV以当前速度和方向匀速前进,会在一个设定的时间阈值(例如2秒或3秒)内与前车或其他相关车辆发生碰撞,那么 score_TTC 就会被设为0。
案例1(保持安全TTC): AV在4秒的规划中,始终与前车保持着,若按当前状态行驶,则至少需要4秒才会追尾的距离。这个TTC大于安全阈值(比如阈值是2.5秒)。那么 score_TTC = 1。
案例2(TTC过低):AV规划跟车行驶,在第3秒时,如果它和前车都保持当前速度,它将在1.5秒后撞上前车。这个1.5秒低于安全阈值(比如2.5秒)。那么 score_TTC = 0。这个0分会严重拉低加权平均分的总分。
时刻 t = 1.5秒 (AV规划的第1.5秒):
AV瞬时速度: 40 km/h (直线向前)
前车瞬时速度: 35 km/h (直线向前)
两车当前距离: 8米
TTC计算:AV比前车快5km/h (约1.39m/s)。要追上8米的距离需要 8 / 1.39 ≈ 5.75秒。
比较: 5.75秒 > 2.5秒。此瞬间TTC通过。 score_TTC 仍为 1。
时刻 t = 2.8秒 (AV规划的第2.8秒):
AV瞬时速度: 50 km/h (直线向前) (AV可能计划继续加速或保持此速度)
前车瞬时速度: 40 km/h (直线向前) (前车在原始数据中可能此时减速了,或者AV靠得太近了)
两车当前距离: 6米 TTC
计算: AV比前车快10km/h (约2.78m/s)。要追上6米的距离需要 6 / 2.78 ≈ 2.16秒。
比较: 2.16秒 < 2.5秒 (安全阈值)! 此瞬间TTC违规!
score_TTC 的最终结果: 因为在 t = 2.8秒 这个时刻检测到了TTC违规,所以不管其他时刻TTC是否安全,最终这个4秒规划的 score_TTC 直接被设定为 0。
C (Comfort - 舒适度): 评价AV规划轨迹的平顺性,主要看加速度和加加速度(jerk,即加速度的变化率)是否在舒适范围内。
权重 weight_C = 2。score_C 是根据AV轨迹的加速度和jerk与预设舒适阈值比较得出的,通常在[0, 1]之间。越平稳,得分越高。
案例1(舒适): AV规划的加速、减速和转向都非常平缓,最大加速度没有超过2.0 m/s²,最大jerk没有超过2.5m/s³。score_C 可能会得到 0.9 或更高。
案例2(不舒适): AV规划了一个急刹车(比如加速度达到 -4.0 m/s²)或者一个非常突兀的转向(导致很大的侧向加速度或jerk)。score_C 可能会很低,比如 0.3。
实验
原始的自动驾驶数据集(如OpenScene)包含大量简单、无挑战性的场景(如静止、匀速直线行驶),这些场景无法有效评估高级自动驾驶算法的性能,因为简单的基线模型在这些场景下也能获得不错的评分。
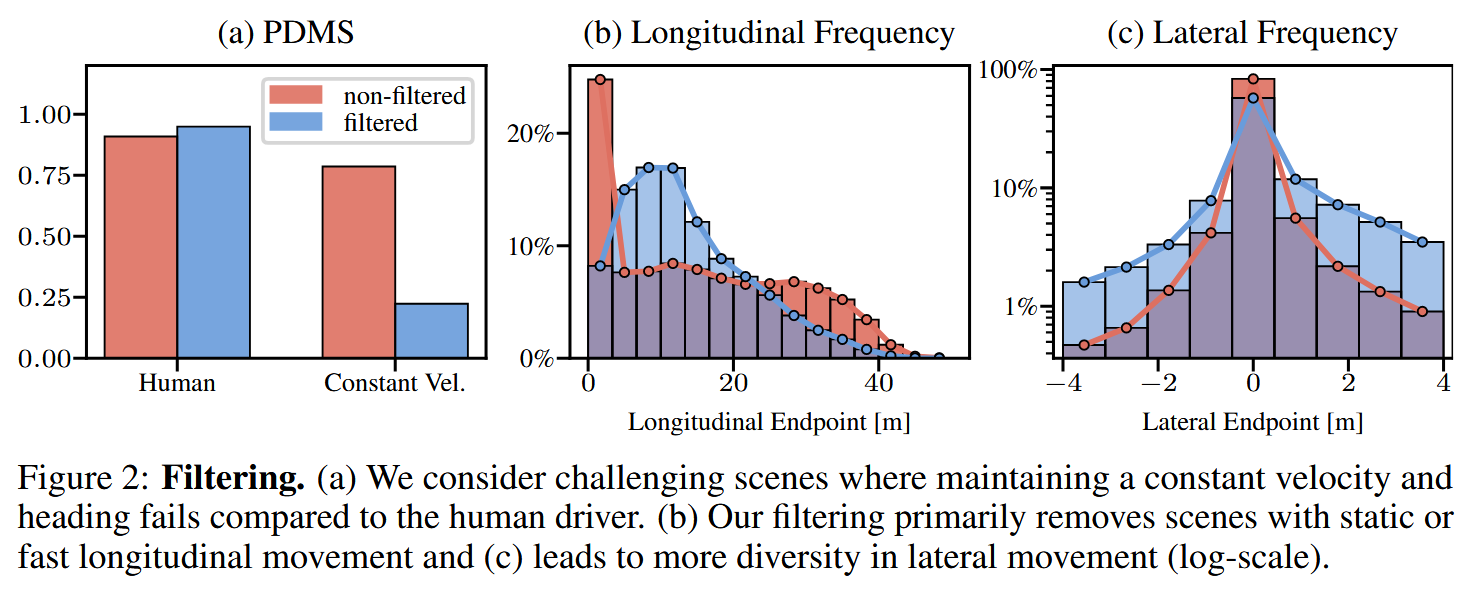
图2(a) 直观展示了筛选后,简单基线模型的性能大幅下降,而人类驾驶员的性能略有提升,两者差距显著拉大,证明了筛选后数据集的挑战性显著提高。
图2(b)和 (c ) 展示了筛选后数据集在场景类型上的变化:减少了静止和单调的直线行驶场景,增加了转弯、变道等更复杂、更多样性的横向和纵向驾驶行为的比例。
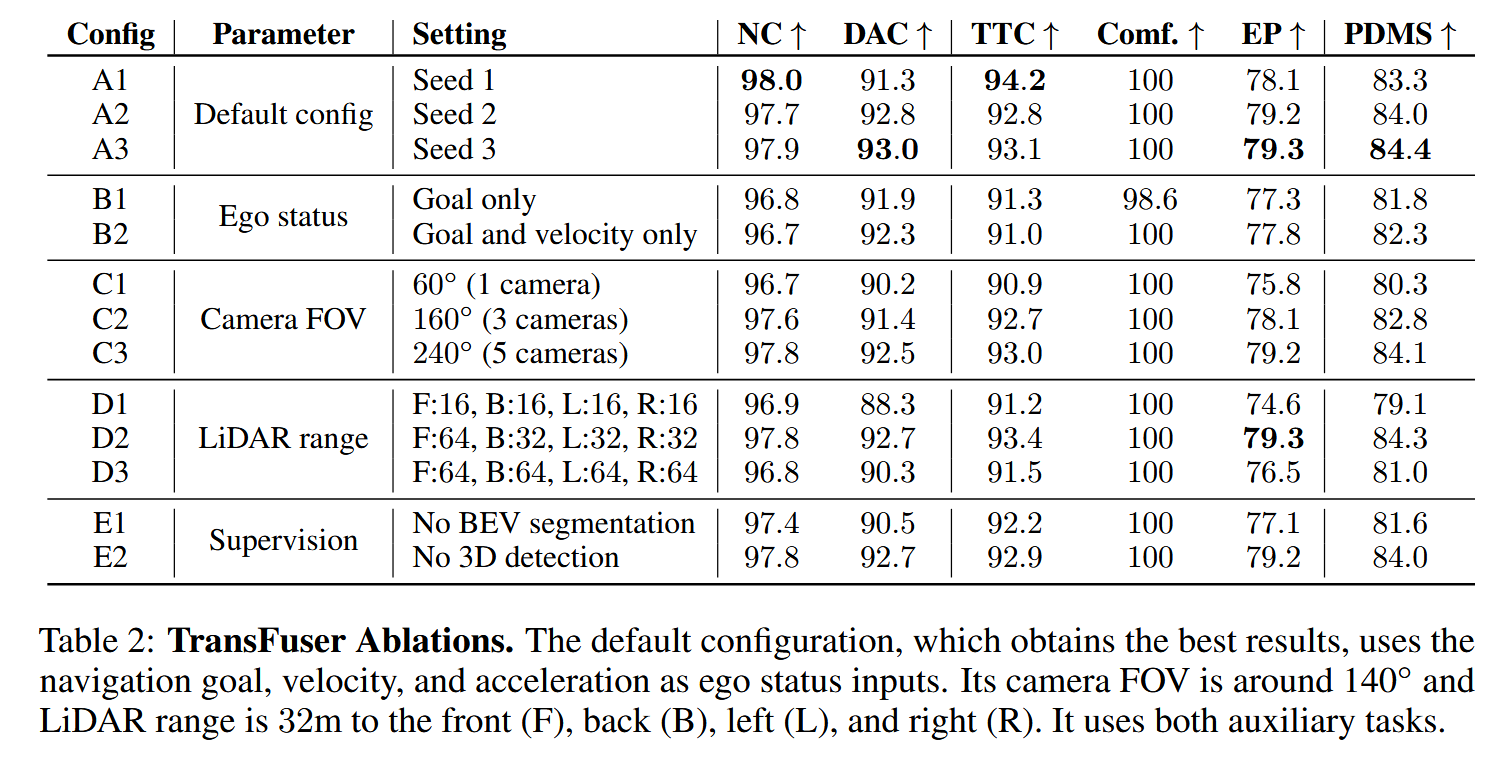
1、自车状态信息的重要性: 速度和加速度等信息对模型有益,但模型并非完全依赖它们,传感器数据起着关键作用。
2、传感器配置的权衡:摄像头: 适度的广角视野(如3摄像头约140°-160°)优于单前视窄角摄像头,但盲目增加摄像头数量和视野,收益有限。
3、LiDAR: 存在一个最佳的探测范围(默认的32米表现不错)。范围过小(16米)甚至不如不用LiDAR;范围过大(64米)也无益或有害,这可能与辅助任务的有效性有关。
4、辅助任务的价值: 鸟瞰图语义分割对提升模型性能有积极作用,而3D物体检测在当前实验设置下的贡献不明显。
缺点
1、高PDMS得分不完全等同于高CLS得分 (缺乏真实反应性和误差累积考量)
NAVSIM 的 PDMS是通过一种“非反应式”开环仿真计算的,这意味着环境中的其他交通参与者不会对被测AV(自动驾驶车辆)的规划做出反应。同时,它评估的是一次性的短期规划,没有考虑在连续的闭环驾驶中,微小误差可能随时间累积并放大的效应。
2、PDMS继承了nuPlan CLS的某些固有缺陷
3、未考虑所有交通规则和效率指标
案例1 (交通规则-停止标志): AV 接近一个停止标志(Stop Sign)。如果路口没有其他车辆,AV 可能规划了一个缓慢通过但不完全停稳的动作。只要这个动作没有导致碰撞、没有开出路面、TTC也安全,PDMS分数可能依然不错。但实际上,AV 违反了“停止标志前必须完全停止”的交通规则。NAVSIM 当前的评分体系可能不会直接惩罚这种违规。
案例2 (交通规则-红灯): 类似地,如果AV在一个没有其他车辆的红灯路口直接通过,只要没发生直接的危险(碰撞等),PDMS 可能不会充分反映这个闯红灯的严重违规行为。
4、“非过错方”追尾定义导致后向感知重要性降低
在 NAVSIM(以及 nuPlan CLS)当前的碰撞责任判定中,如果自车被后方车辆追尾,通常不被认为是自车的“过错”(at-fault)。
这就导致了车辆后方感知(比如后视摄像头、后向雷达)以及避免被追尾的驾驶策略(比如平稳减速、提前观察后方来车)在NAVSIM的评分体系中的重要性被削弱了。因为即使发生了这类追尾,如果自车不被判责,PDMS分数也不会因此大幅降低。
鉴于 NAVSIM 的这些局限性(尤其是其非反应式特性),作者强烈建议研究者在开发规划算法时,同时使用像 CARLA 这样的基于图形的闭环模拟器作为 NAVSIM 的补充基准测试工具。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)