登录社区云,与社区用户共同成长
邀请您加入社区
深圳市考计算机素质测试备考资料,包含视频教程,上千题库,连续3年真题,含答案+解析。20年真题+答案+解析。22年真题+答案+解析。23年真题+答案+解析。
计算机题库
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
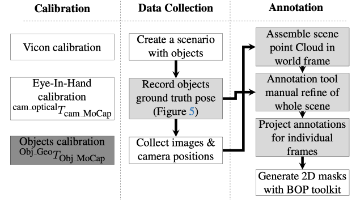
MR6D:移动机器人6D姿态估计基准测试
单臂路由实验
基于VMD-CPA-KELM-IOWAl-CSA-LSSVM碳排放的混合预测模型研究附Matlab代码
一、研究背景与意义随着机器人技术在工业制造、物流运输、灾害救援、服务领域等场景的广泛应用,机器人的自主移动能力成为核心技术之一,而路径规划作为自主移动的关键环节,直接决定了机器人的运动效率、安全性与任务完成质量。机器人路径规划的核心目标是在存在障碍物的环境中,寻找一条从起始点到目标点的最优路径,通常以路径长度最短、运动时间最少、能耗最低、路径平滑度最高等为优化指标。
扫一扫分享内容






















 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)