国内首款软、硬件开源GNSS/INS组合导航开发平台(七)
最近对天璇OEM板载IMU(TDK IIM-46234)进行了静止条件下的测试,数据采集了8小时,采样率100Hz。从图3可以看出,陀螺的精度和数据手册给出的1.9°/h比较符合。原始数据已经上传到网盘,感兴趣的小伙伴可以下载下来进一步分析。链接:https://pan.baidu.com/s/1dEQJ5gWv_TMrmDj_o0VkMg提取码:5vhd。
·
前言
最近对天璇OEM板载IMU(TDK IIM-46234)进行了静止条件下的测试,数据采集了8小时,采样率100Hz。
一、处理工具
数据处理采用西工大严龚敏老师的matlab工具箱(psins230923)。
二、数据处理
1、数据导入
代码如下(示例):
clear;
close all;
glvs;
ts = 1/100;
load iim-46234-8h.mat;
imuplot(imu);
imumeanplot(imu,10/ts,glv.dph);
avars(imu(:,1:3)/ts/glv.dph, ts);
2、数据处理
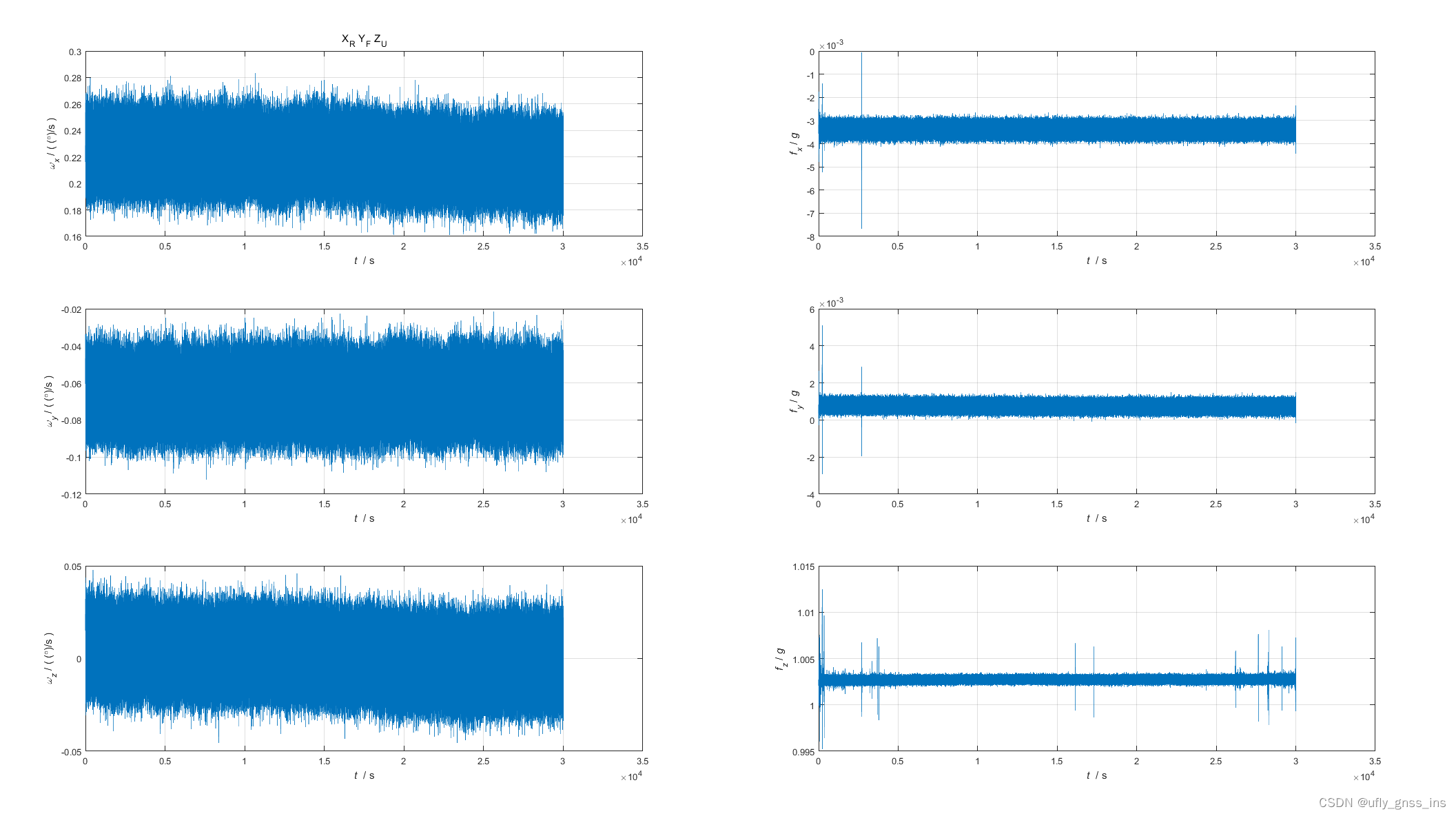
图1 IMU原始数据
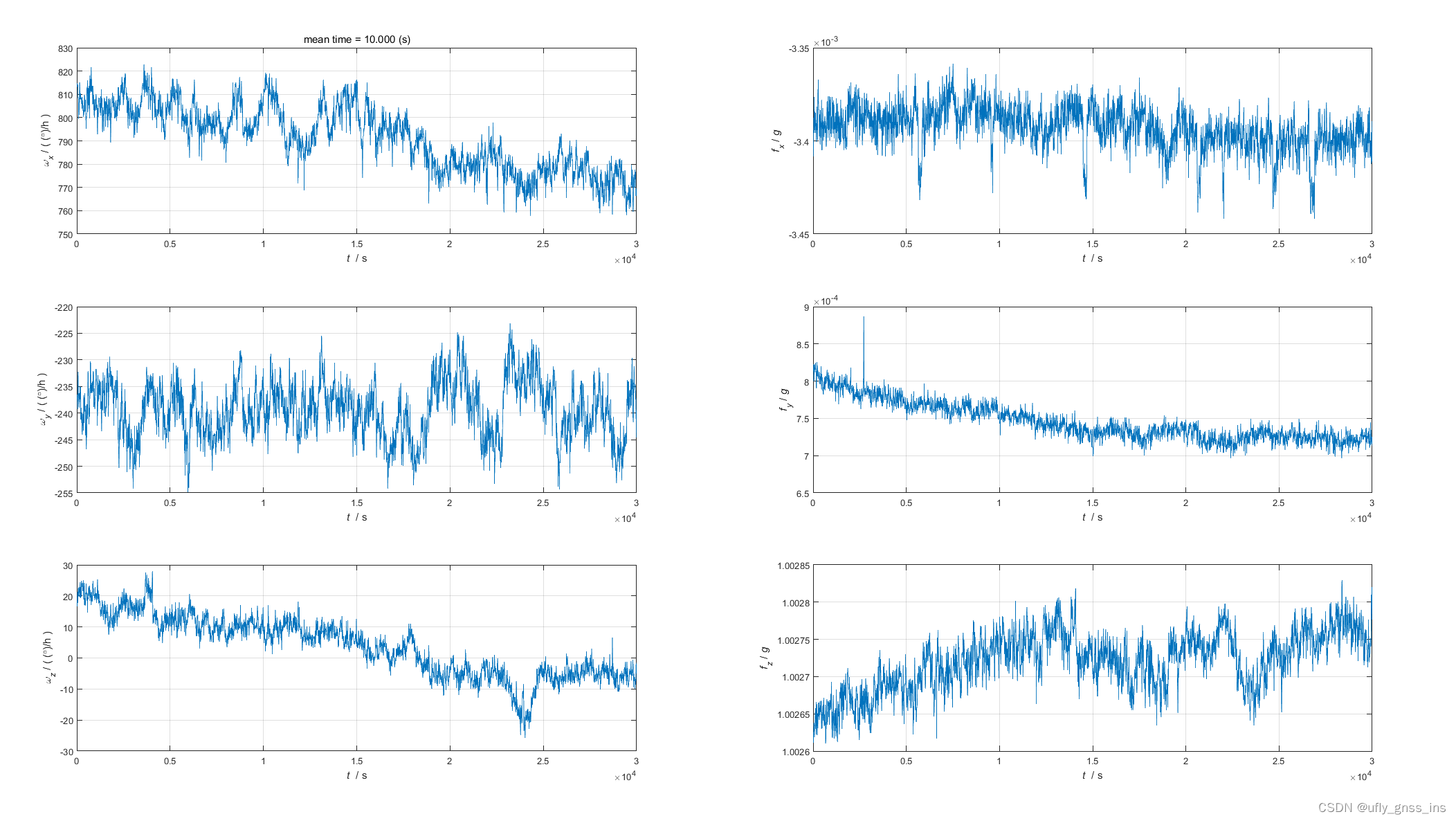
图2 IMU原始数据10秒平滑
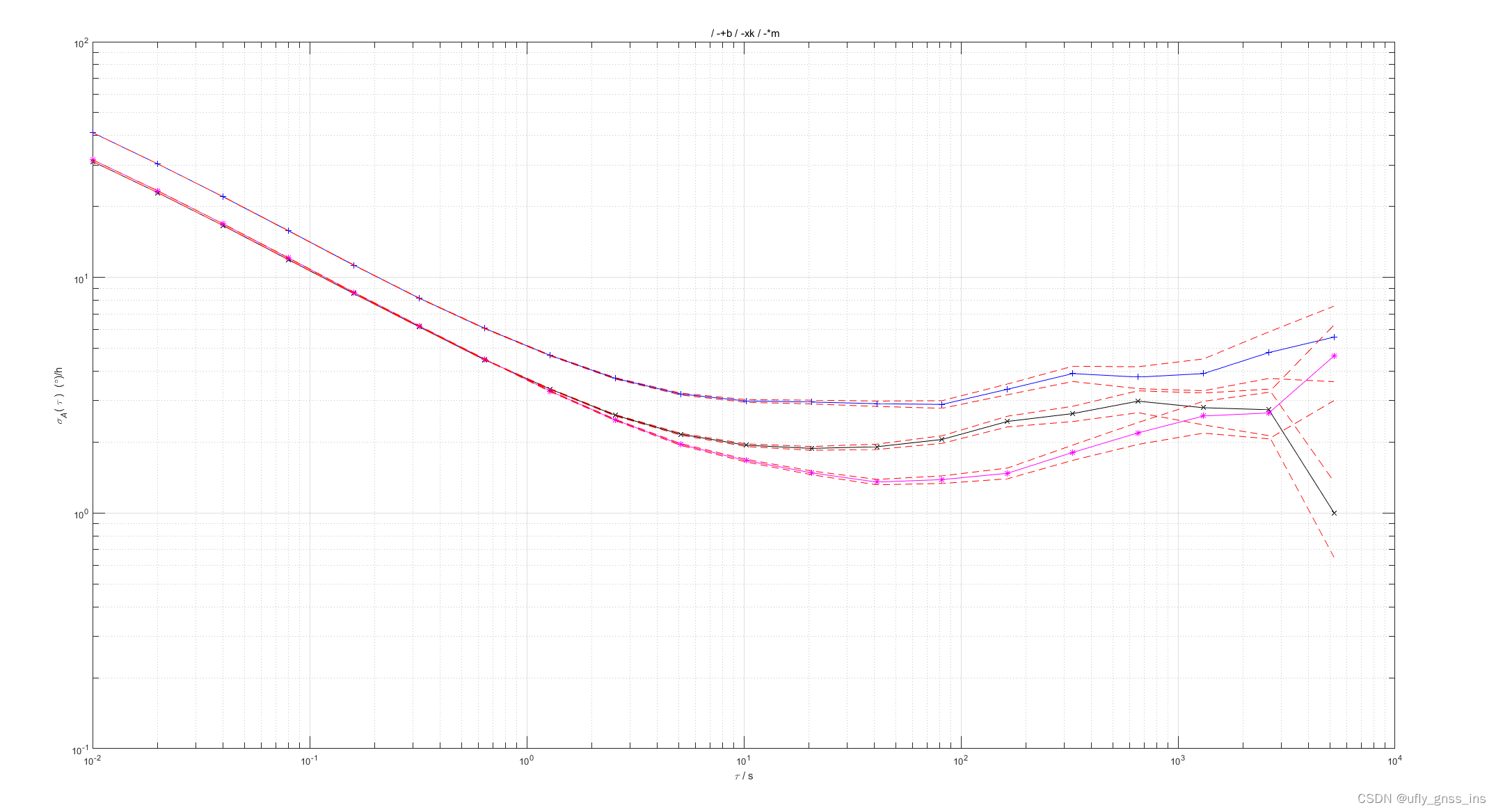
图3 陀螺Allan方差曲线图
总结
从图3可以看出,陀螺的精度和数据手册给出的1.9°/h比较符合。
原始数据已经上传到网盘,感兴趣的小伙伴可以下载下来进一步分析。
链接:https://pan.baidu.com/s/1dEQJ5gWv_TMrmDj_o0VkMg
提取码:5vhd

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)