机器人仿真-gazebo学习笔记(1)
摆烂才是王道
·
0.前言
Gazebo是一个功能强大的三维物理仿真平台,具有强大的物理引擎、高质量的图形渲染能力、重点是他是开源的、免费的。
1.Gazebo具备以下几个特点:
1.动力学仿真:支持多种高性能物理引擎,像ODE、Bullet等.
2.三维可视化环境:x、y、z三维环境。
3.传感器仿真:支持传感器数据的仿真。
4.多种机器人模型:官方提供了大量的机器人模型,同时也支持自定义机器人模型
2.对于想要入门ros、slam的同学来说gazebo是强烈建议学习的
3.gazebo的使用前提
0.更新gazebo到gazebo11
1)查看我们的gazebo插件(我这里已经是gazebo11了,但对于ubuntu18.04的同学来说应该是gazebo9)
dpkg -l | grep gazebo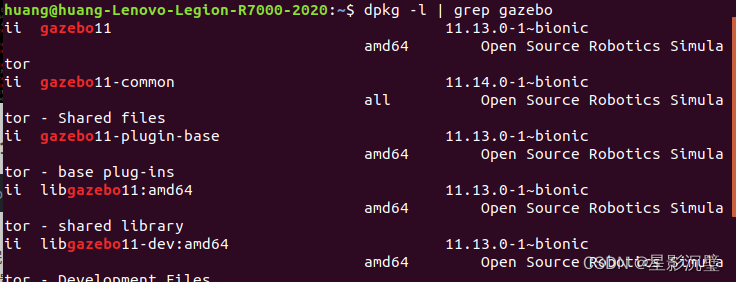
2)卸载gazebo9的插件
sudo apt-get purge gazebo9 gazebo9-common gazebo9-plugin-base libgazebo9:amd64 libgazebo9-dev:amd64 ros-melodic-gazebo-*
3)配置镜像
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
4) 设置Key
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
5)更新
sudo apt-get update6)安装gazebo11
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev
7)安装gazebo的ros插件
sudo apt install ros-melodic-gazebo11-*
8)检验gazebo安装
gazebo9)启动ros和gazebo
roscore
rosrun gazebo_ros gazebo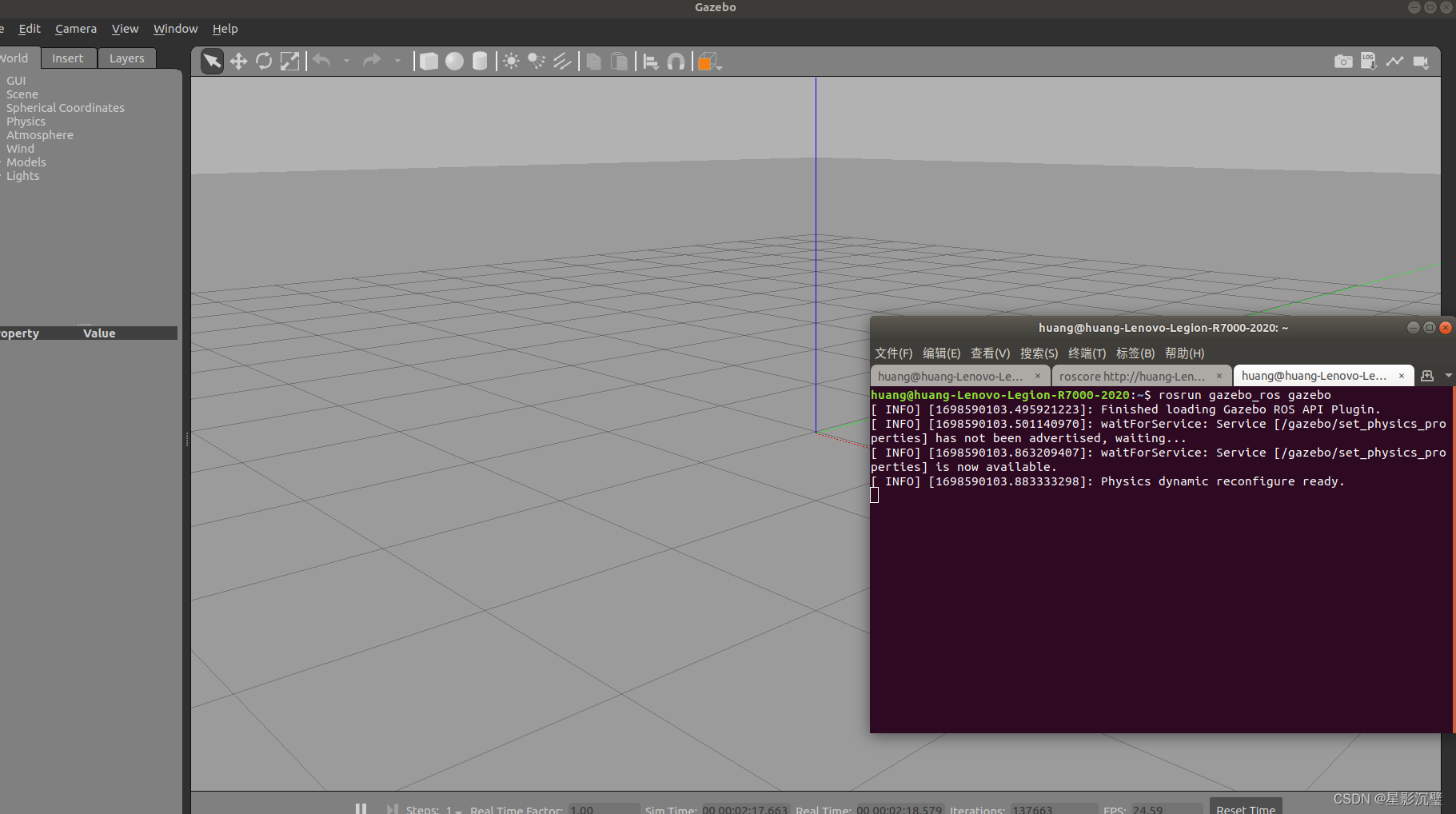
10)验证ros和gazebo连接成功
rostopic list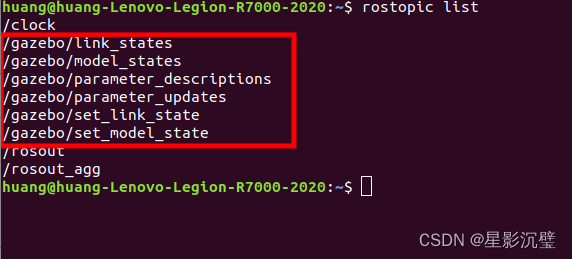
11)gazebo的服务列表
rosservice list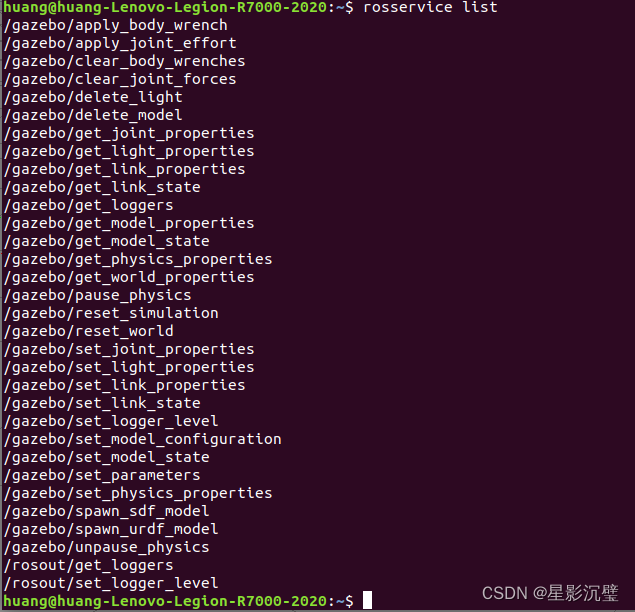
1.先建立一个工作空间
mkdir -p gazebo_ws/src
cd gazebo_ws/src/

2.安装功能包
git clone https://gitee.com/bingda-robot/bingda_tutorials

3.编译工作空间
cd ..
catkin_make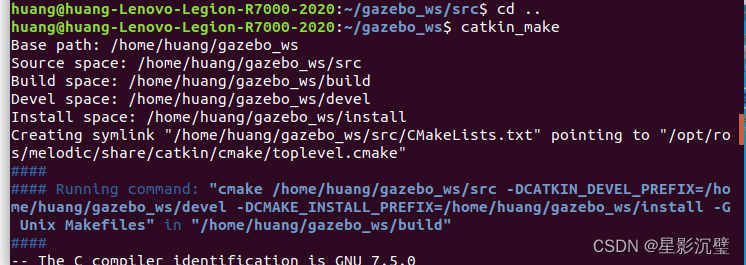
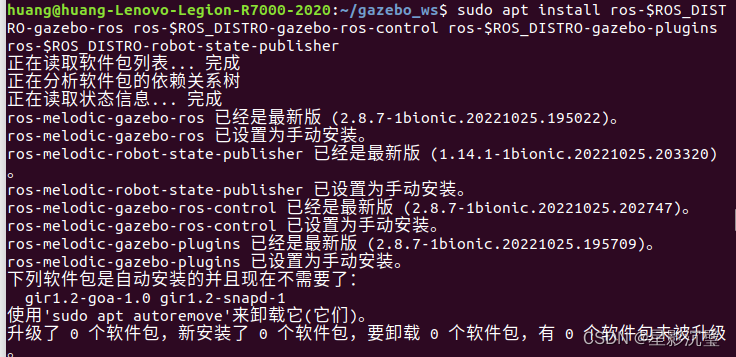
4.安装依赖
sudo apt install ros-$ROS_DISTRO-gazebo-ros ros-$ROS_DISTRO-gazebo-ros-control ros-$ROS_DISTRO-gazebo-plugins ros-$ROS_DISTRO-robot-state-publisher

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 2
2 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)