基于三维点云的机器人杆件目标识别与抓取(七)
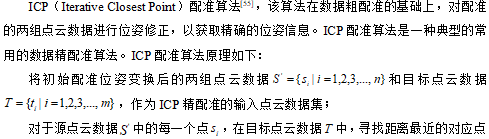
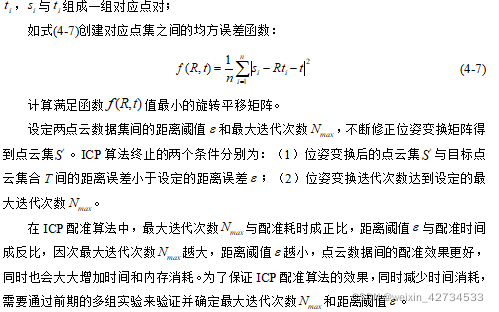
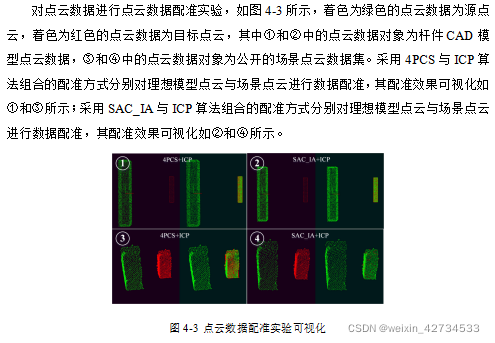
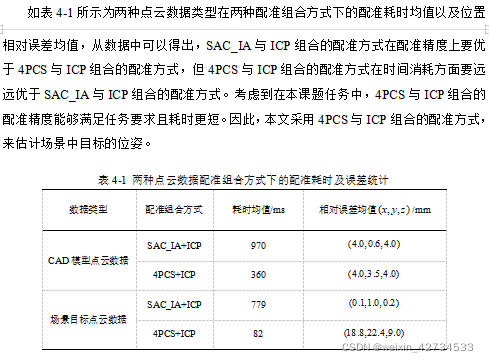
@点云数据精配准经点云数据粗配准算法SAC_IA算法或4PCS算法配准处理后,源点云与目标点云基本重合,但仍存在匹配偏差。为了降低彼此间的匹配偏差,需要在粗配准结果的基础上采用精配准处理,对当前位姿进行修正,从而提高源点云数据与目标点云数据之间的配准精度。本文采用的精配准算法为最近点迭代配准算法。提示:以下是本篇文章正文内容,下面案例可供参考ICP数据精配准2 点云数据配准实验及分析...
·

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)