柔性体没有应变_一种带扭矩、位置传感器的柔性机器人关节驱动器实现方案——串联弹性驱动器(SEA)...
有小伙伴留言给我,询问带力控SEA驱动器的设计方案,这篇文章就给大家介绍一下我们研究所(Italian Institute of Technology)驱动器的设计方案,大家取各家所长。PS:我只写Paper上你能看的到的内容,工程经验上的Trick就不能写了,尊重我们这里Technician的劳动成果。我们知道在机器人平台上,在动态解耦(Dynamic Coupling)和运动、力控制的关键因素
有小伙伴留言给我,询问带力控SEA驱动器的设计方案,这篇文章就给大家介绍一下我们研究所(Italian Institute of Technology)驱动器的设计方案,大家取各家所长。
PS:我只写Paper上你能看的到的内容,工程经验上的Trick就不能写了,尊重我们这里Technician的劳动成果。

我们知道在机器人平台上,在动态解耦(Dynamic Coupling)和运动、力控制的关键因素就是精确地传递力矩。传统的纯位置控制已经不能满足目前机器人动态运动性能控制的硬件需要,因此带精确力反馈的驱动器设计就迫在眉睫。而在人型机器人领域,对输出(力矩/质量)密度、以及一定柔性(Compliance)的要求,决定了驱动器需要配备谐波减速器(Harmonic Drive)以及柔性体(Compliant Structure)。
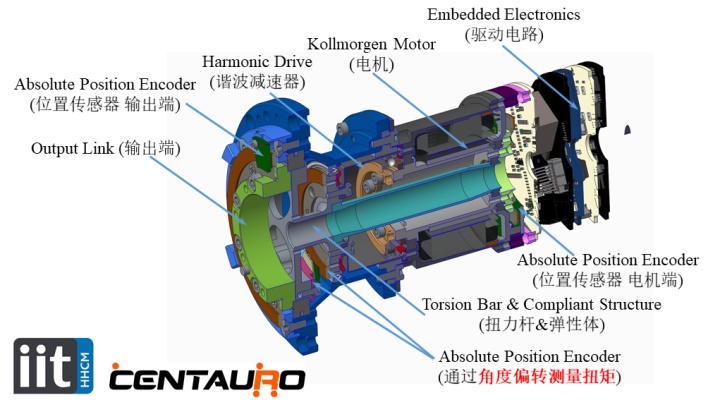
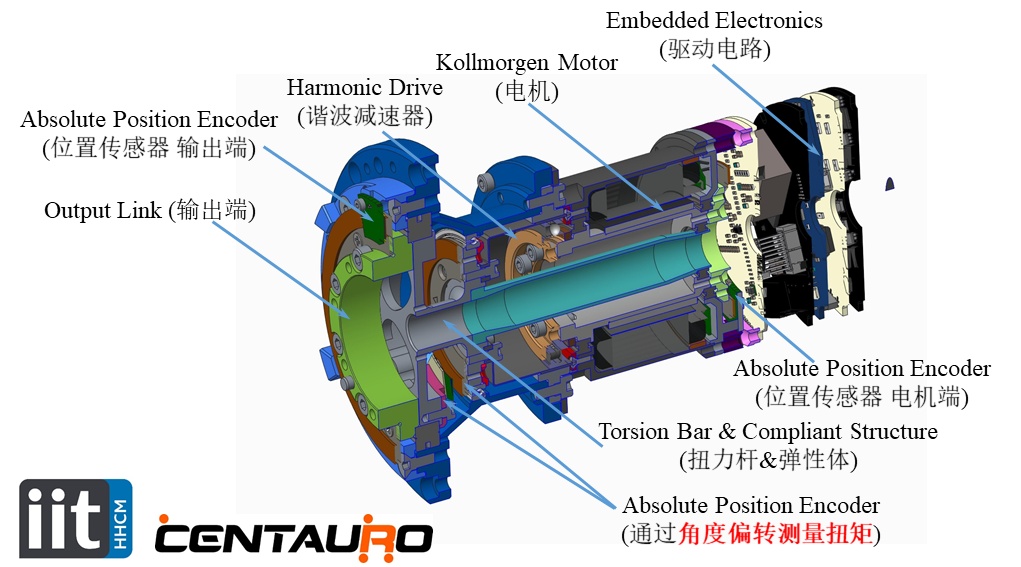
如上图所示,是我们部门第二代SEA驱动器的截面(Section)结构图,从左至右整个驱动器由以下五部分组成:输出端+弹性体+谐波减速器+电机+驱动电路
这里需要着重解释的是扭矩测量的方案:
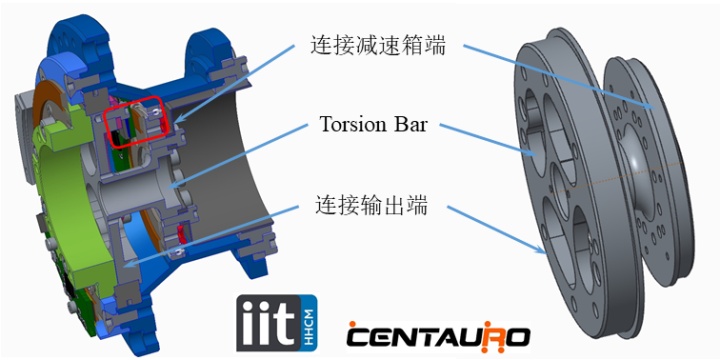
如上图,驱动器中的力矩是通过安装在弹性体两个平面的位置传感器实现的,而这两个平面通过一个扭力杆(Torsion Bar)连接,这两个平面一端连接着输出端(Output Link)另外一段连接在谐波减速器端(Harmonic Drive)。当输出端驱动机器人关节运动时,这两个平面会在轴向(Axial)扭转产生一个偏角
注意:在这里,我们并没有采用应变片(Strain Gauge)的原理测量扭矩,之后也会写篇文章介绍:为什么我们会选择基于位置传感器测量的角度偏转来得到扭矩的原因,以及关节零部件Torsion Bar设计细节。
我们第二代SEA集成做了3种Size,如下图所示:
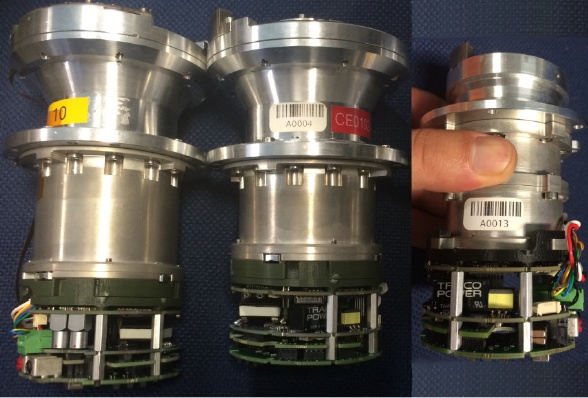
相应的电机参数如下表所示:

这三种Size的驱动器将会根据不同关节的力矩要求应用在如下图所示的四足-腿轮式-人马机器人上(CENTAURO)
这代驱动器是我们今年年初刚刚设计出来的,力控的性能在最近几个月得到了验证,因为同事准备发明年的IROS的缘故,一些刚出炉的精彩的Demo在这里就不发出来了。以下两个Demo是来自17年的IROS和已投18年的ICRA,和大家分享:
第一段

这一段Demo实际上是一条在臀部-膝盖-脚踝(Trunk-Knee-Ankle)关节上,布置3个Pitch方向自由度的储能、弹跳单腿。
这个视频验证了在
相关参考文献:
- Lorenzo Baccelliere, Navvab Kashiri, Luca Muratore, Arturo Laurenzi, Małgorzata Kamedula, Alessio Margan, Stefano Cordasco, Jorn Malzahn, Nikos G. Tsagarakis. "Development of a Human Size and Strength Compliant Bi-ManualPlatform for Realistic Heavy Manipulation Tasks", IROS 2017
- F.Negrello, M.Garabini, M.G.Catalano, J.Malzahn, D.G.Caldwell, A.Bicchi, and N.G.Tsagarakis. "A Modular Compliant Actuator for Emerging High Performance and Fall-Resilient Humanoids", Humanoids, 2015

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 1
1 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)