一起自学SLAM算法:6.3 典型机器人底盘搭建
连载文章,长期更新,欢迎关注:机器人是一个复杂的装置,涉及到执行机构、感知、决策等主要环节。机器人上的配备的常用执行机构有轮式运动底盘、机械手臂、音响和显示屏;机器人上的感知设备通常有激光雷达、声呐、摄像头、IMU、轮式里程计编码盘、麦克风、触摸感应;机器人的决策是机器人智能的体现,机器人通常借助感知装置持续跟外部环境进行交互,从而来获取机器人的状态和环境的状态,我们可以简单的把机器人获取自身状态
连载文章,长期更新,欢迎关注:
机器人是一个复杂的装置,涉及到执行机构、感知、决策等主要环节。机器人上的配备的常用执行机构有轮式运动底盘、机械手臂、音响和显示屏;机器人上的感知设备通常有激光雷达、声呐、摄像头、IMU、轮式里程计编码盘、麦克风、触摸感应;机器人的决策是机器人智能的体现,机器人通常借助感知装置持续跟外部环境进行交互,从而来获取机器人的状态和环境的状态,我们可以简单的把机器人获取自身状态的行为叫做自我认知,把机器人获取环境状态的行为叫做环境认知。机器人的自我认知和环境认知往往是相辅相成互相作用的,所以这里就不做区分了。由于目前的机器人智能还比较低级,所以这里讲到的机器人认知也是低级别的,例如人脸识别、语音识别、机器人定位、环境障碍物探测。有了认知,机器人就可以帮人类完成很多工作了,例如搬运货物、照看小孩、陪伴闲聊、帮忙管理家里的智能设备、查询天气交通新闻资讯,等等。我们可以把机器人帮助人类完成的这些个工作叫做机器人的技能,机器人拥有的这些技能可以简单理解为机器人低级别的思想。机器人的躯壳+机器人的认知+机器人的思想,基本上就是机器人该有的模样了,如图6-24所示。
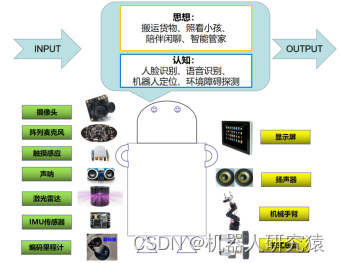
图6-24 想像中机器人的样子
如果大家是资深开发者,对底盘又有特殊定制需求,就可以自己搭建底盘。这里按照搭建过程,依次介绍底盘运动学模型选择、传感器选择、主机选择、底盘硬件系统搭建和底盘软件系统搭建。
6.3.1 底盘运动学模型选择
前面已经对几种常见的底盘运动学模型进行了介绍,这里就归纳总结一下,帮助大家更系统地认识两轮差速、四轮差速、阿克曼和全向底盘的优缺点,这些底盘的运动学模型总结如图6-25所示。
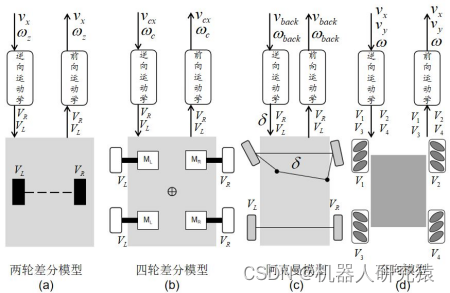
图6-25 常见运动学模型总结
进一步讨论这几种运动模型的运动约束情况、转弯半径、里程计精度和轨迹跟踪,可以总结出如表6-1所示的优缺点。除全向模型外,其他模型运动都受约束,全向模型移动更加灵活。对于最小转弯半径,只有阿克曼模型为非0,即不能原地旋转,其他模型都可以以0转弯半径原地旋转。在里程计精度方面,两轮差速模型最高,由于四轮差速模型移动过程会发生不可控的侧向滑动,故其里程计精度最低。在轨迹跟踪方面,由于四轮差速模型会发生不可控的侧向滑动,故其轨迹跟踪比较复杂;而阿克曼模型不能以0转弯半径原地旋转,故其轨迹跟踪也比较复杂。
表6-1 常见运动学模型优缺点对比
|
运动学模型 |
运动约束情况 |
最小转弯半径 |
里程计精度 |
轨迹跟踪 |
|
两轮差速模型 |
受约束 |
0 |
高 |
容易 |
|
四轮差速模型 |
受约束 |
0 |
低 |
复杂 |
|
阿克曼模型 |
受约束 |
非0 |
中 |
复杂 |
|
全向模型 |
不受约束 |
0 |
中 |
容易 |
不难发现,两轮差速模型不但结构组成简单,而且具有最小转弯半径为0、里程计精度到、轨迹跟踪容易等优点。在没有特殊需求的场景,强烈推荐两轮差速模型。
如果有室外越障能力和大载重的要求,就需要选择四轮差速模型或者阿克曼模型。四轮差速的优点是结构组成简单,缺点是里程计精度低;阿克曼模型虽然不会像四轮差速模型中那样发生不可控的侧向滑动而导致里程计不准,但代价是引入了复杂的转向结构设计。
在一些对运动灵活性和移动效率方面要求特别高的场合,比如仓库中的货物调度机器人,就需要选择全向模型。
6.3.2 传感器选择
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
6.3.3 主机选择
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
6.3.4 底盘硬件系统搭建
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
6.3.5 底盘软件系统搭建
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
源码仓库
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
参考文献

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)