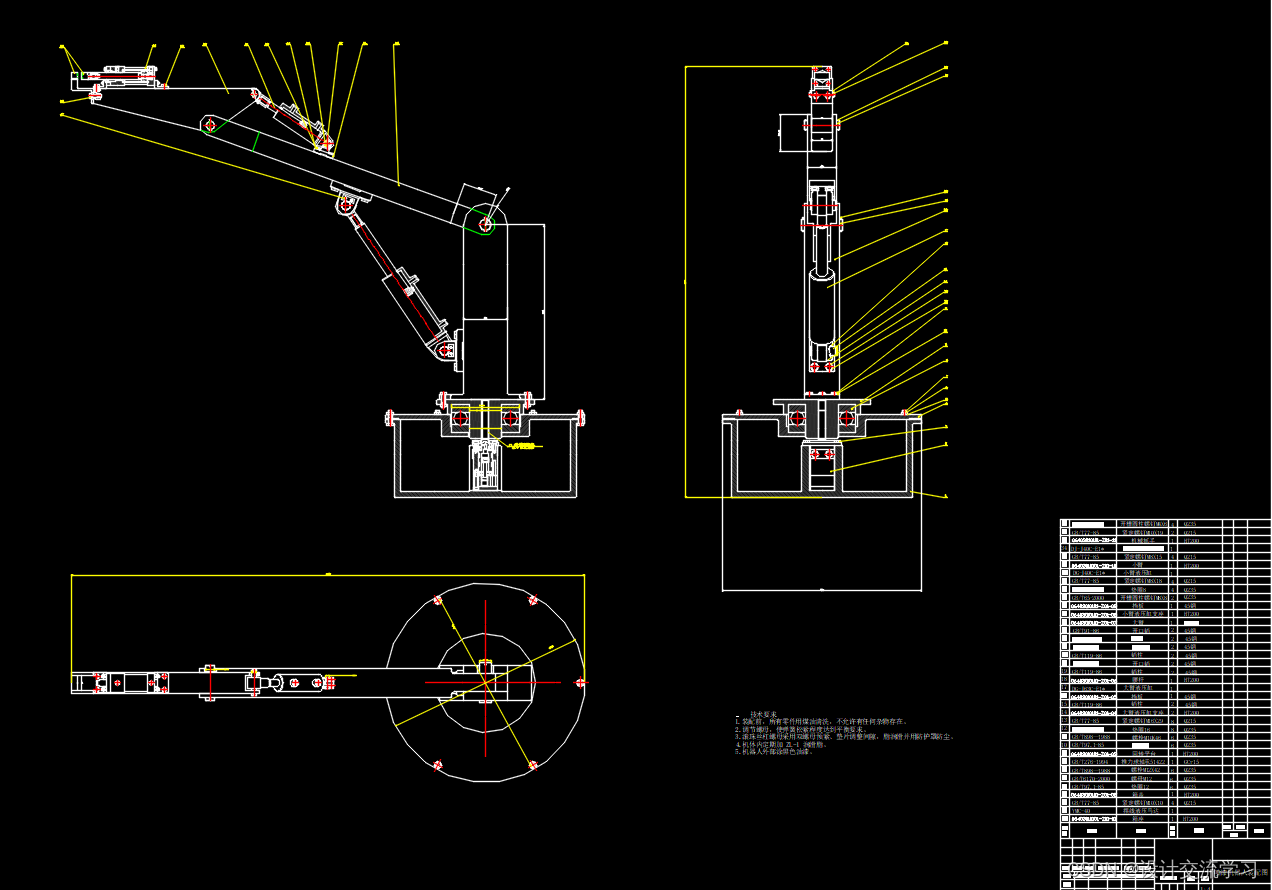
喷漆机械手设计_喷涂机械手设计_喷涂机器人设计_喷漆机器人设计【说明书+任务书+CAD图纸+UG三维图+外文翻译)
纵观喷涂机器人这几十年的发展,其经历了三次变革:第一次发生在1988年,从液压传动变成电传动,第二次变革是从简单的动作控制到过程控制,第三次变革是从2000年之后,利用电脑软件控制机器人,实现为客户定制机器人,比如可以控制机器人喷漆时的空气流量和油漆流量、喷涂范围和形状以及喷涂的色彩种类等等[4]。而我国的相关的喷涂机器人行业起步较晚,仅有上海交大研制的上海III号喷涂机器人,国家机械工业局北京自
目录
从1962年美国研制出第一台工业机器人以来,工业机器人至今已经走过了4O多年的历程。由于喷涂作业属于有害作业,这些作业的劳动强度大,技术水平要求高,并且手工喷涂人员会因技术、体力等因素造成产品质量缺陷,因此为了改善劳动条件和提高产品质量产量降低成本,这个领域中大量地使用了机器人[1]。
国外从60年代开始研究喷漆机器人,直到60年代末挪威率先推出针对喷漆实际情况而设计的专用喷漆机器人。从此,喷漆机器人的研制和应用发展十分迅速,喷漆机器人在工业发达国家80年代已达到普及阶段。例如美国的FUDGE公司和德国的HATEL公司以及总部设在瑞士的ABB公司等都生产了各种型号的喷涂机器人。它广泛地应用于汽车、农机、发动机,工程机械、机床、家电等大、中型企业的实际喷涂作业[2]。机器人喷涂作为工业机器人的一个主要应用领域,主要包括喷漆、等离子喷涂、静电喷涂、高速火焰喷涂等几大类,采用工业机器人喷涂成形工艺,不仅可以改善工艺操作环境,还可以对喷涂轨迹和过程进行数字化描述、精确控制,从而显著提高喷涂成形工艺的质量和稳定性[3]。
纵观喷涂机器人这几十年的发展,其经历了三次变革:第一次发生在1988年,从液压传动变成电传动,第二次变革是从简单的动作控制到过程控制,第三次变革是从2000年之后,利用电脑软件控制机器人,实现为客户定制机器人,比如可以控制机器人喷漆时的空气流量和油漆流量、喷涂范围和形状以及喷涂的色彩种类等等[4]。目前,工业机器人在喷漆方面的应用比例美国可达12%,世界平均可达5.1%[5]。
我国的喷涂行业特别是在陶瓷行业普遍采用人工作业的方式进行施釉,工人劳动强度大,特别是对工人身体有巨大伤害。而我国的相关的喷涂机器人行业起步较晚,仅有上海交大研制的上海III号喷涂机器人,国家机械工业局北京自动化所研制的PJ一1喷涂机器人等几种相关产品。
…………


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)