ABB机器人PCSDK使用(二)
·
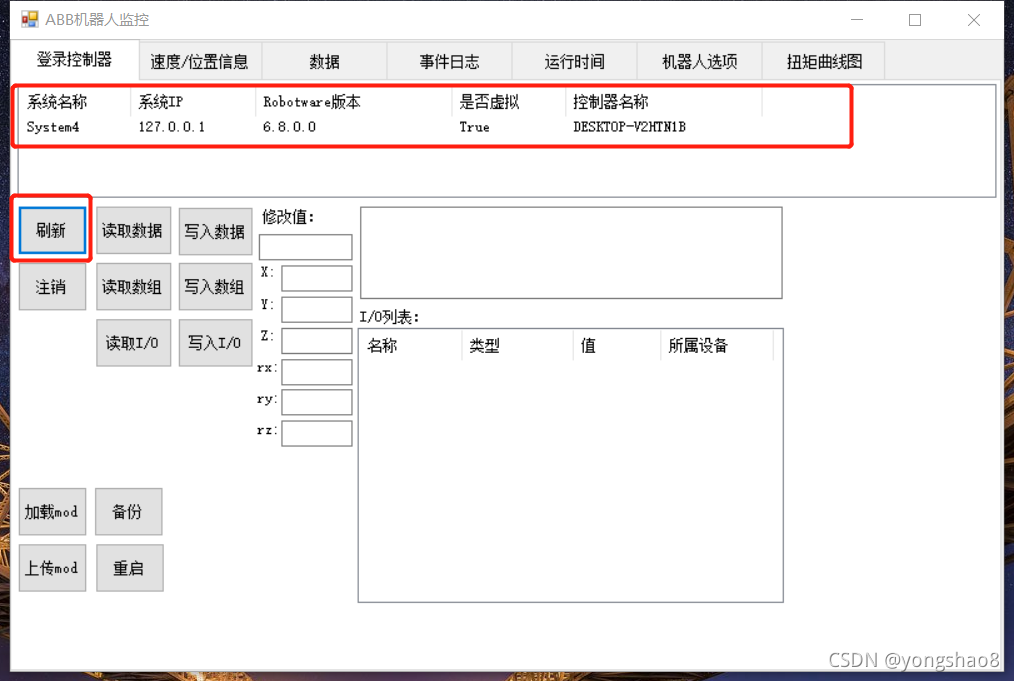
ABB机器人PCSDK包开发上位机
扫描网络上可用的控制器
if (Common.scanner == null)
{
Common.scanner = new NetworkScanner();
}
Common.scanner.Scan();
this.listView1.Items.Clear();
ControllerInfoCollection controllers = Common.scanner.Controllers;
Common.robotCount = controllers.Count;
foreach (ControllerInfo info in controllers)
{
ListViewItem listViewItem = new ListViewItem(info.SystemName);
//listViewItem.Text = info.SystemName.ToString();
listViewItem.SubItems.Add(info.IPAddress.ToString());
listViewItem.SubItems.Add(info.Version.ToString());
listViewItem.SubItems.Add(info.IsVirtual.ToString());
listViewItem.SubItems.Add(info.ControllerName.ToString());
listViewItem.Tag = info;
this.listView1.Items.Add(listViewItem);
}
if (Common.robotCount == 1)
{
ListViewItem item = this.listView1.Items[0];
if (item.Tag != null)
{
ControllerInfo info = (ControllerInfo)item.Tag;
if (info.Availability == Availability.Available)
{
if (Common.controller != null)
{
Common.controller.Logoff();
Common.controller.Dispose();
Common.controller = null;
}
Common.controller = new Controller(info);
Common.controller.Logon(UserInfo.DefaultUser);
}
}
}
我此处是扫描到一个机器人控制器的话,就直接连接该控制器
if (Common.robotCount == 1)
{
ListViewItem item = this.listView1.Items[0];
if (item.Tag != null)
{
ControllerInfo info = (ControllerInfo)item.Tag;
if (info.Availability == Availability.Available)
{
if (Common.controller != null)
{
Common.controller.Logoff();
Common.controller.Dispose();
Common.controller = null;
}
Common.controller = new Controller(info);
Common.controller.Logon(UserInfo.DefaultUser);
}
}
}
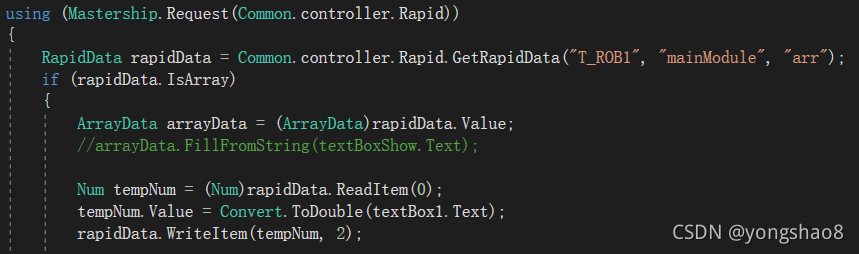
读取和修改机器人单个数据


读取和修改机器人的数据为数组

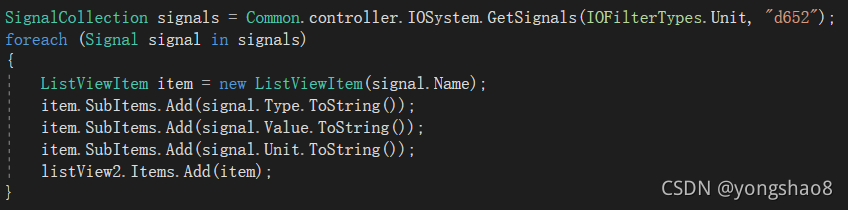
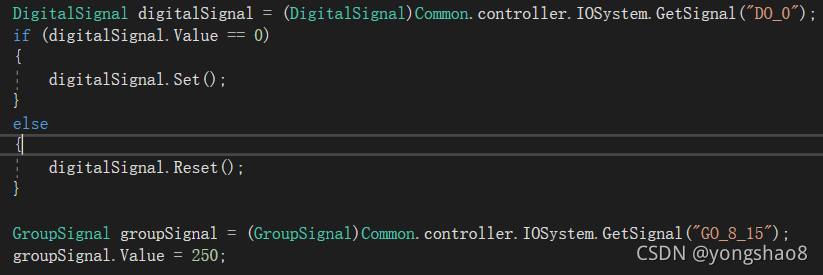
对机器人IO信号的读取和更改
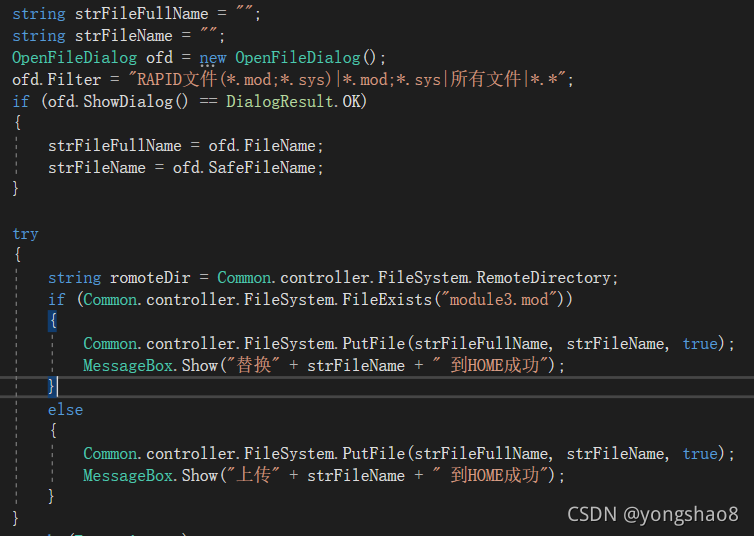
对机器人MOD文件上传和下载

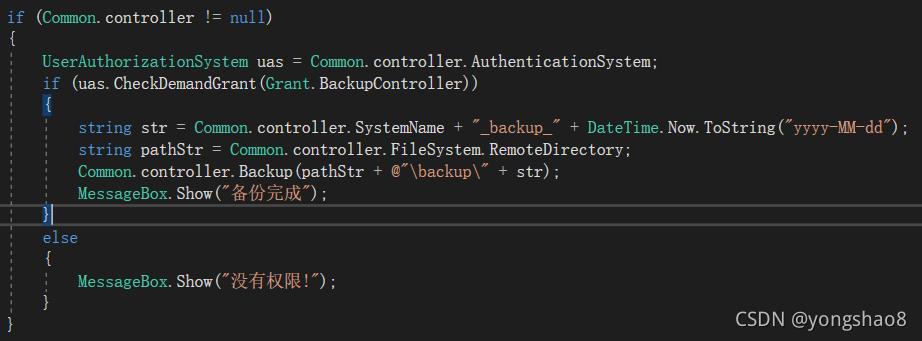
机器人系统备份
机器人重启

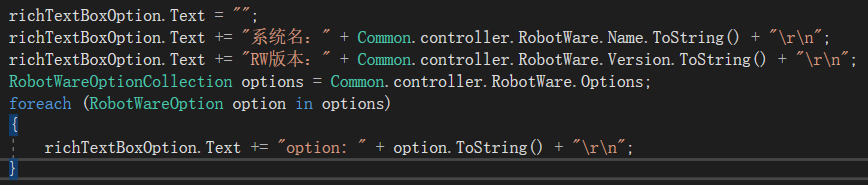
获取机器人选项信息
获取机器人运行时间

PP移动至main
设置指针到指定例行程序

获取例行程序
获取当前关节坐标和世界坐标


设置机器人运行速度倍率


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 15
15 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)