四足机器人的六种步态特征
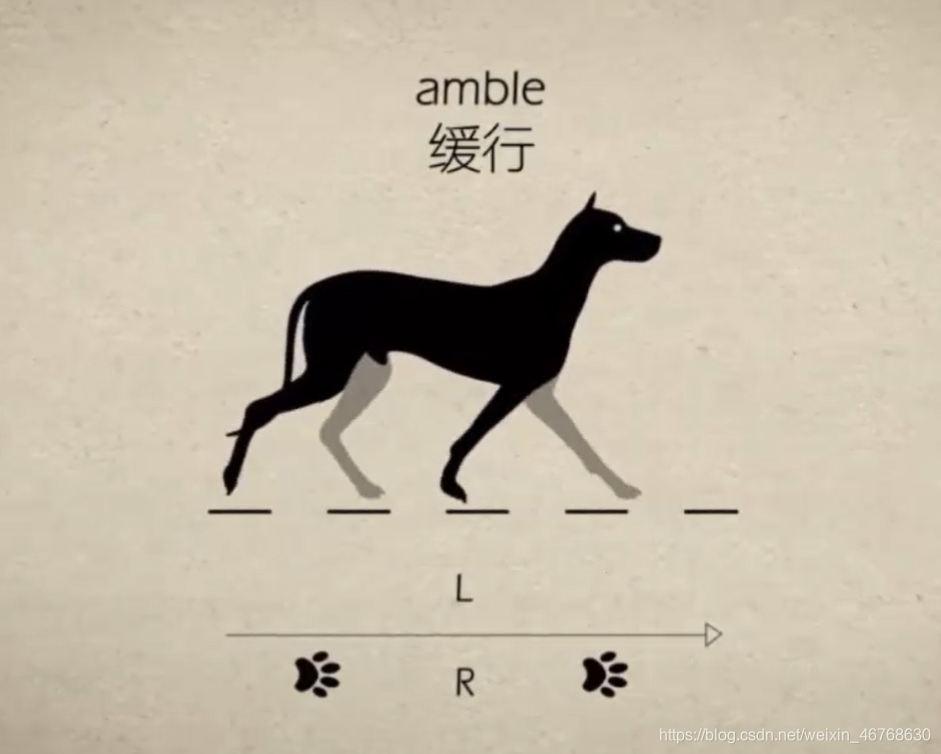
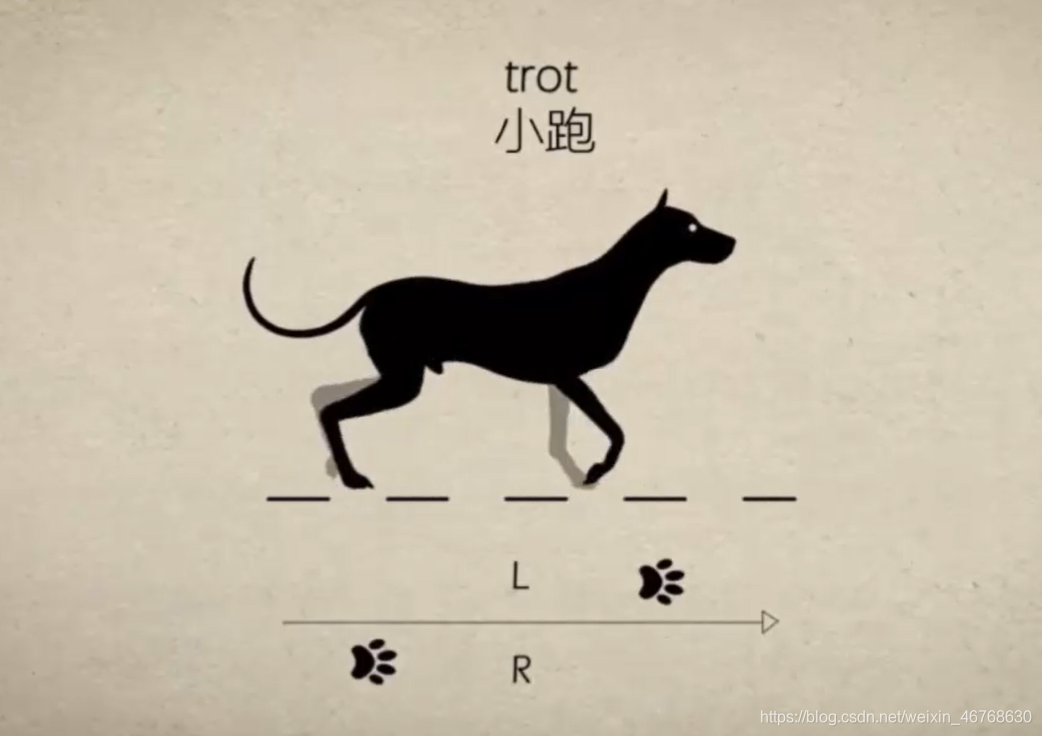
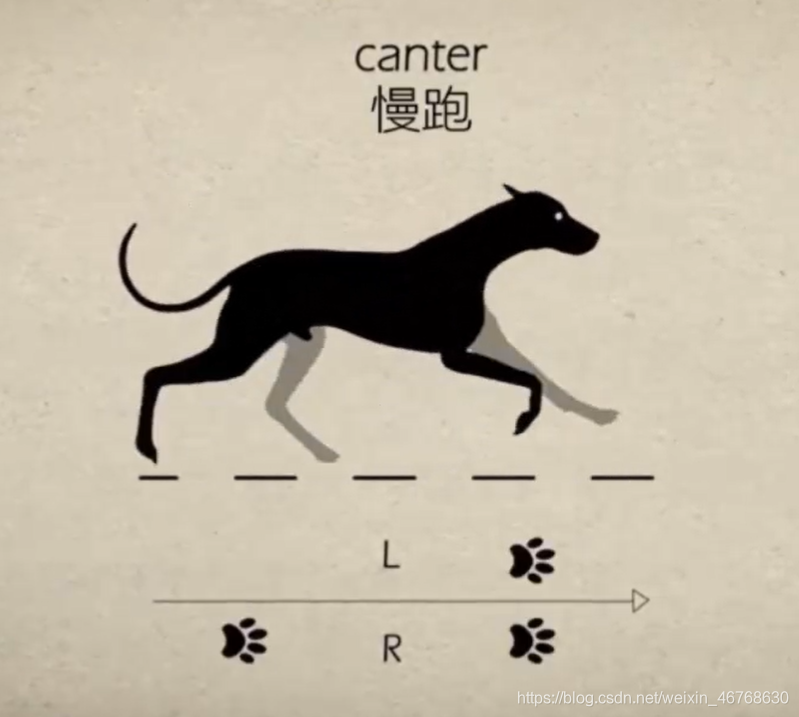
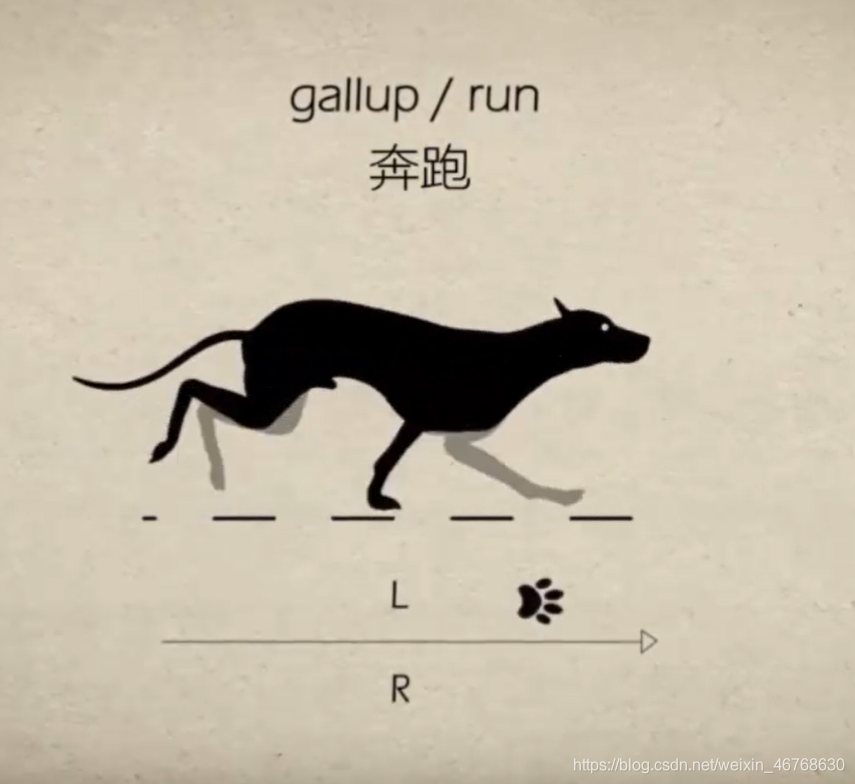
行走如图由三个脚掌支撑地面,这就造成了四足机器人在行走时始终由三个脚组成的三角形区域接触地面,这样四足机器人在行走时就会很平稳。缓行缓行相当于加速的行走。踱步踱步是比较不稳的步态,同侧脚需要来回切换,始终是一侧的脚来支撑地面,这就导致了四足机器人来回会向一侧摆,非常不稳定。小跑小跑在四足机器人中是比较常见的步态,对角线上的脚来回切换,是稳定性和速度兼具的一种步态。慢跑四足机器人在慢跑的时候,总会有
·



DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 11
11 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)