abb机器人伺服电机报闸是什么_ABB 机器人安全回路安全保护机制

智能方在线学院&助力提高您的技术能力
您身边的机器人服务专家
安全保护机制任务目标
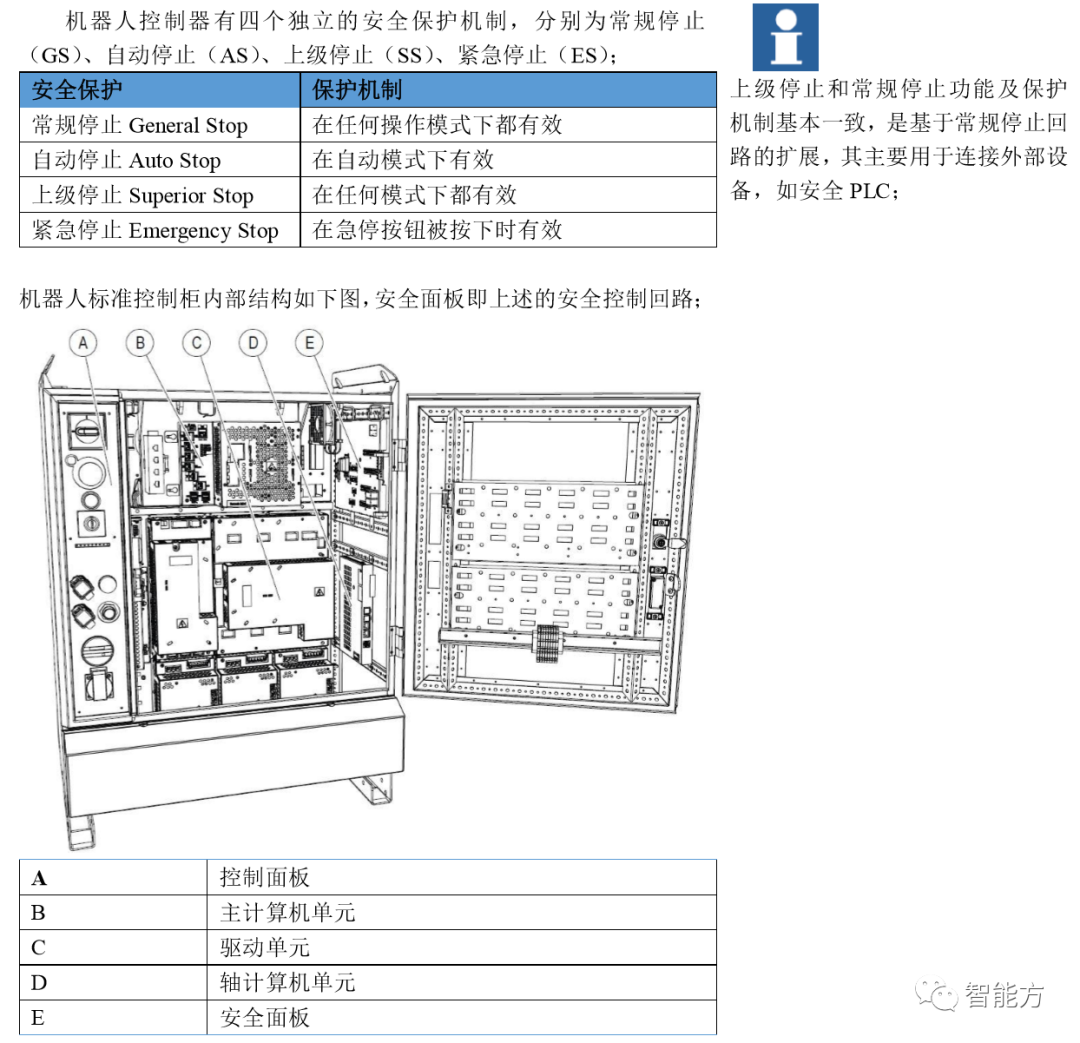
⋅ 安全保护机制
⋅ 紧急停止回路(ES)
⋅ 常规停止回路(GS)
⋅ 自动停止回路(AS)
⋅ 上级停止回路(SS)
机器人系统可以配备各种各样的安全保护装置,例如门互锁开关、 安全光栅等,例如常用的机器人工作站的门互锁开关,打开此装置则 机器人停止运行,避免造成人机碰撞伤害。
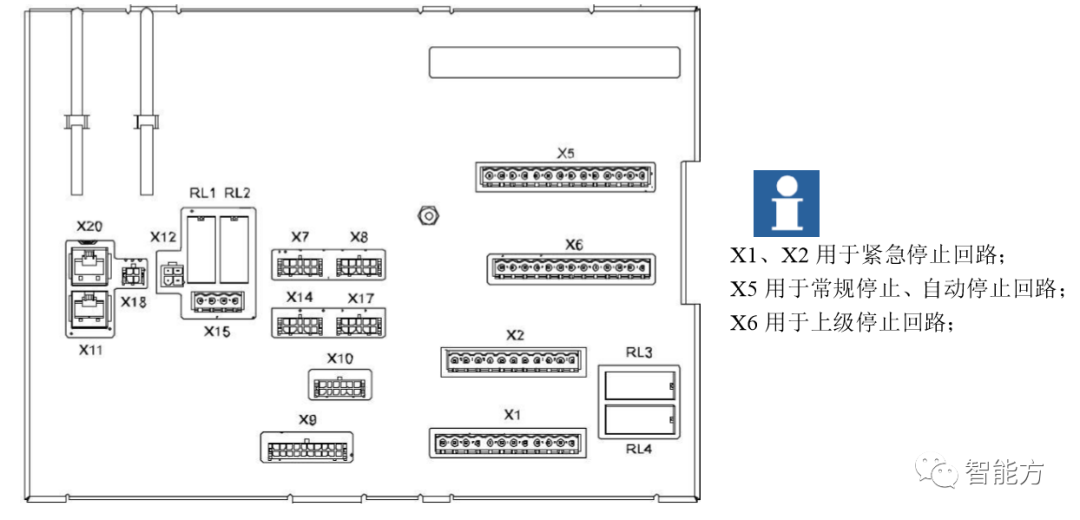
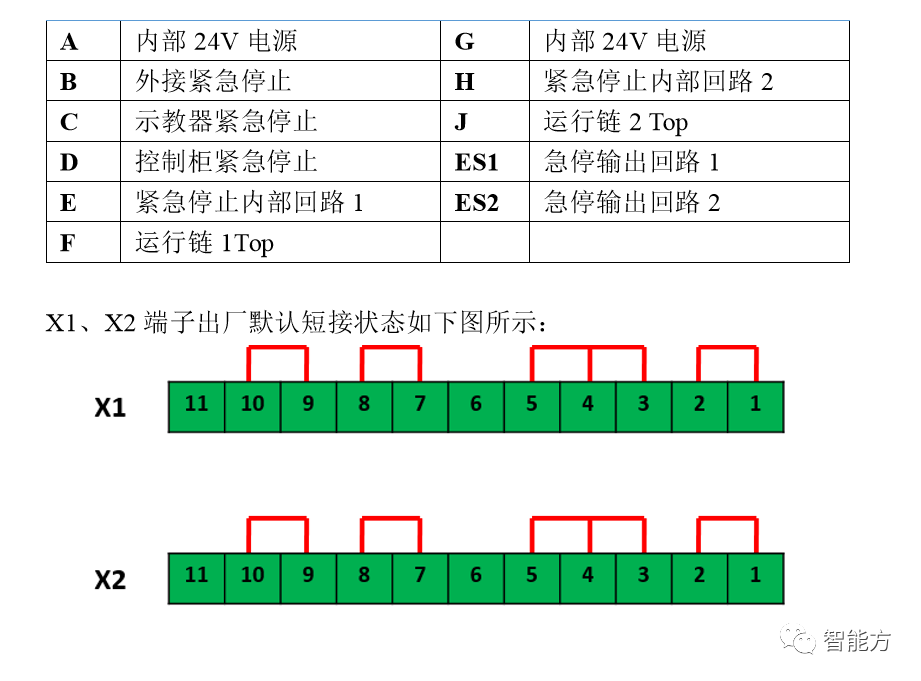
安全面板接口如下图所示;用户外接安全控制回路主要是基于 X1、 X2、X5、X6这 4 个端子排
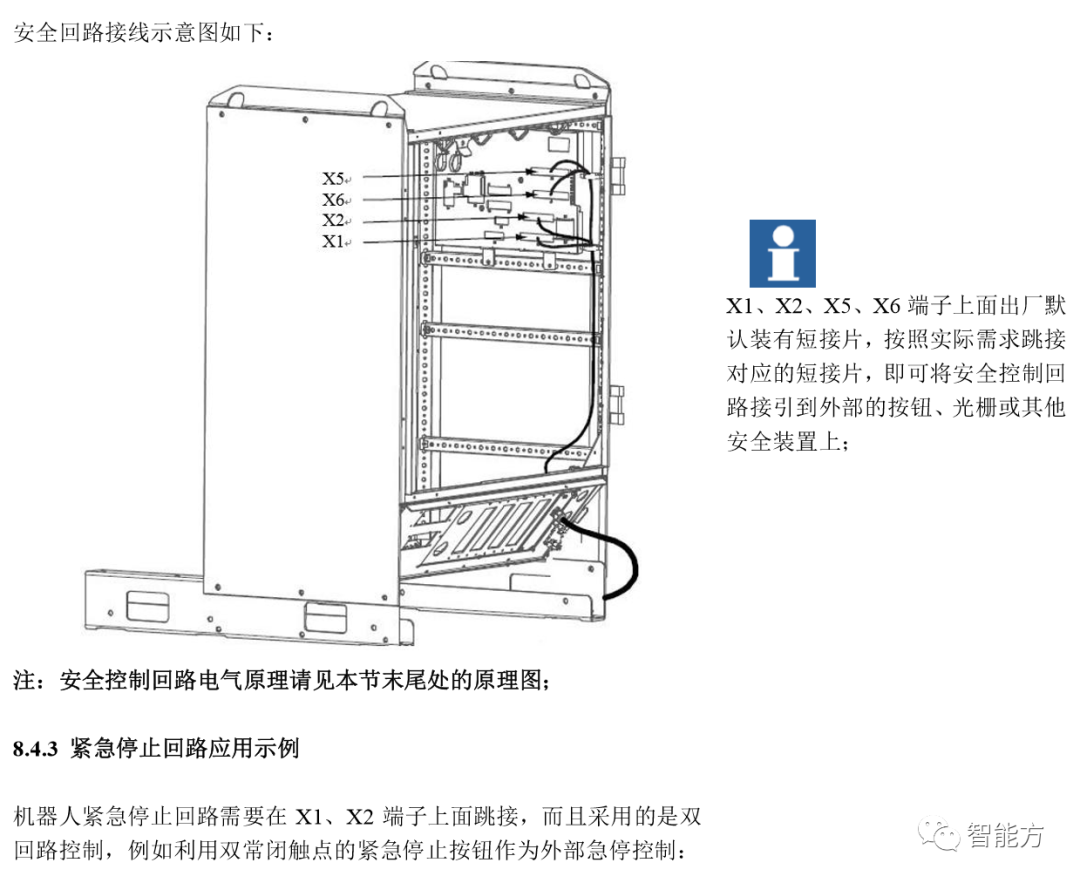
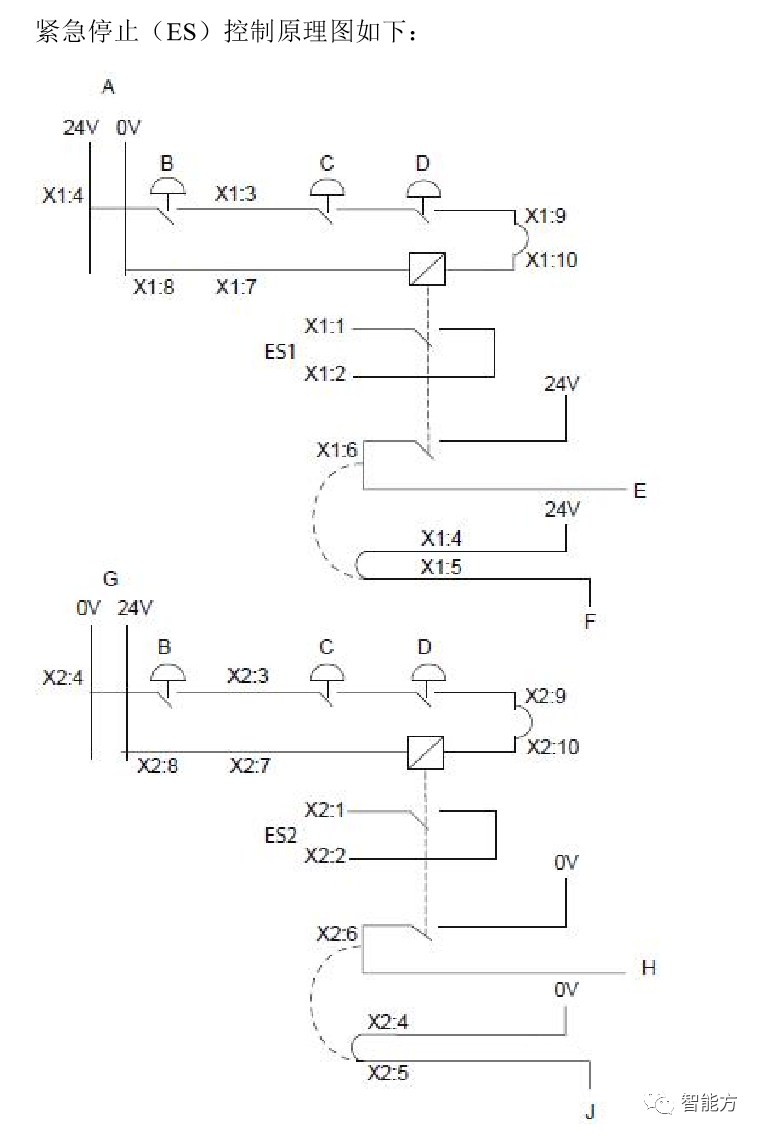
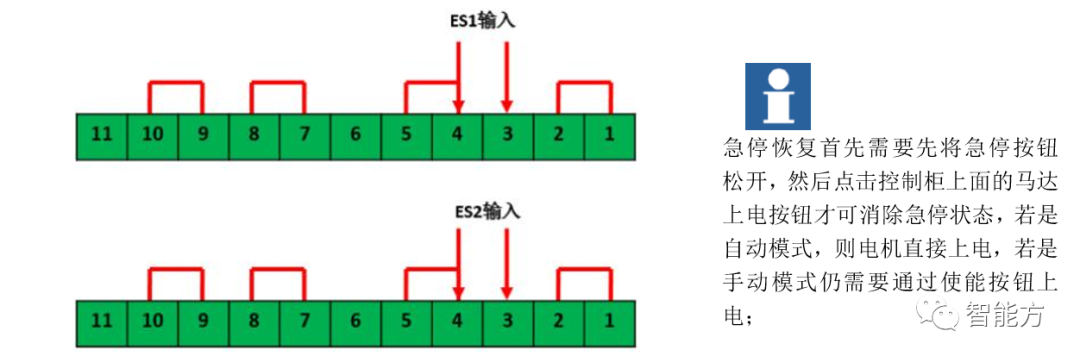
按照上述原理,ES1 和 ES2 分别接入 X1 上面 3-4 和 X2 上面的 3-4, ES1 和 ES2 的另外一端接在急停按钮的常闭触点上,当急停按钮被按 下,则机器人进入紧急停止状态。
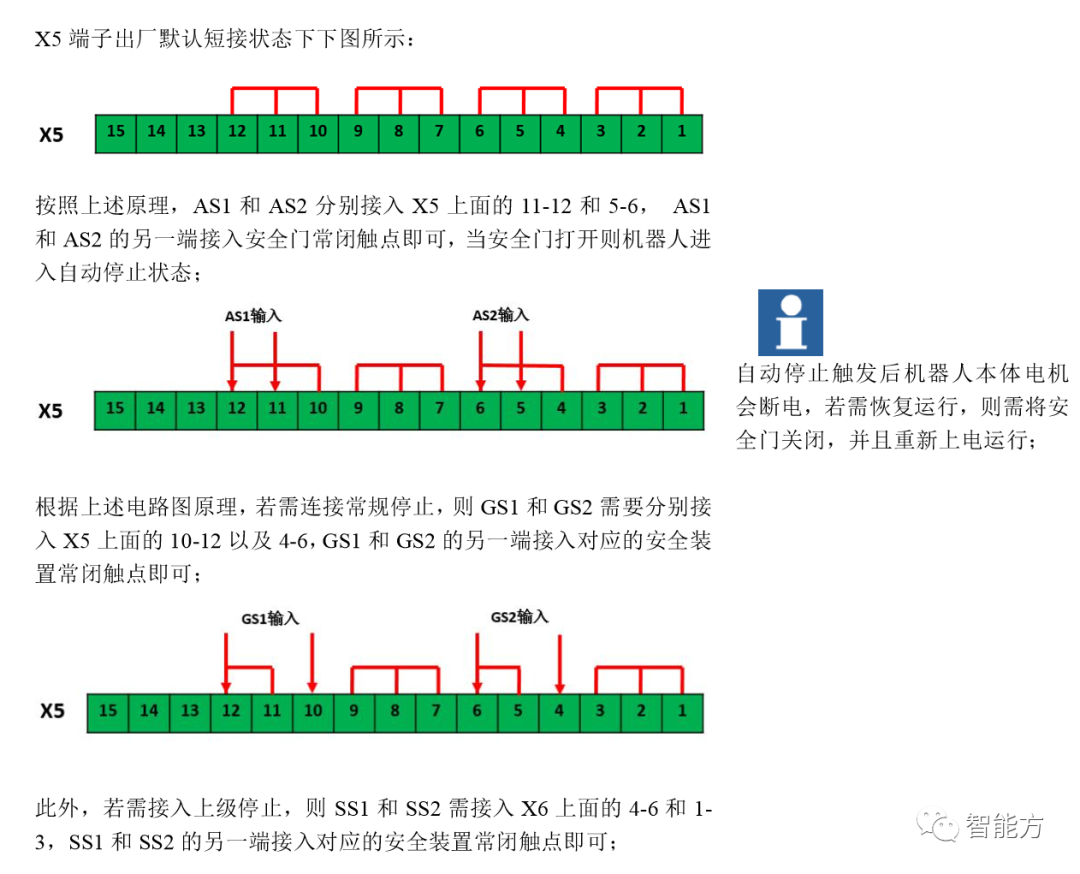
自动停止回路应用示例自动停止回路是在 X5 端子上面跳接,自动停止安全机制只在自 动模式下有效,一般常用于安全门、安全光栅停止,例如将安全门接 入到 X5 端子上,当安全门打开,则机器人停止运行。

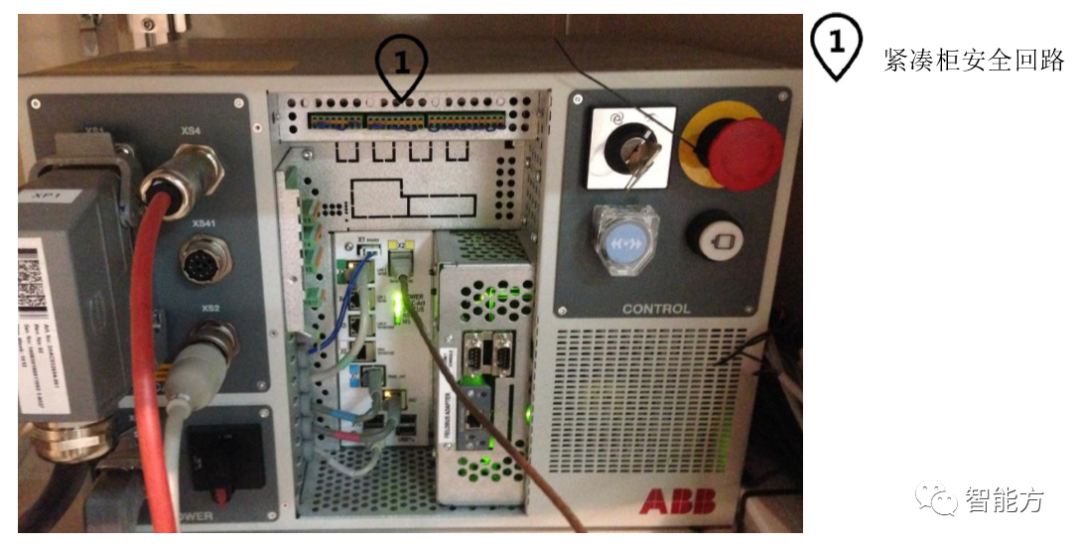
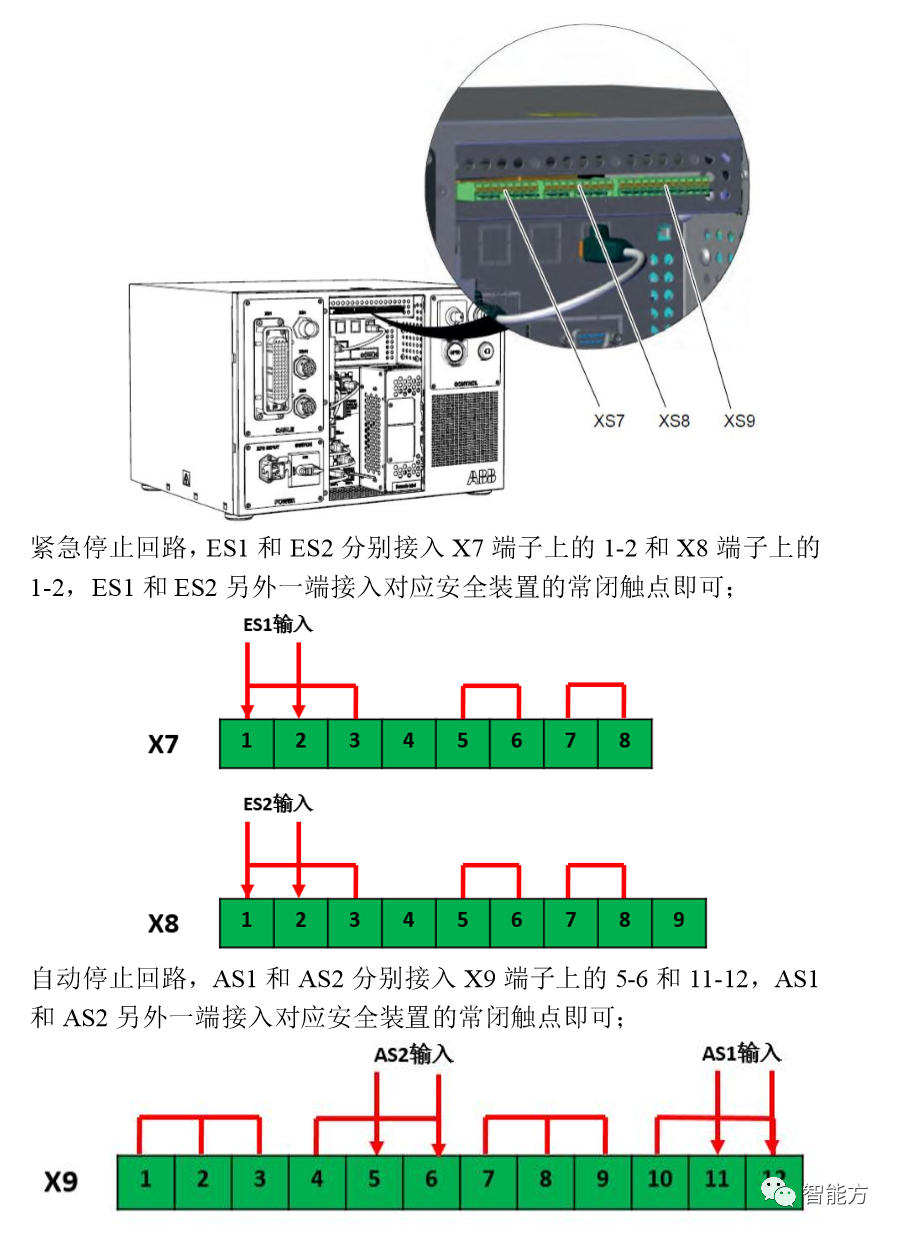
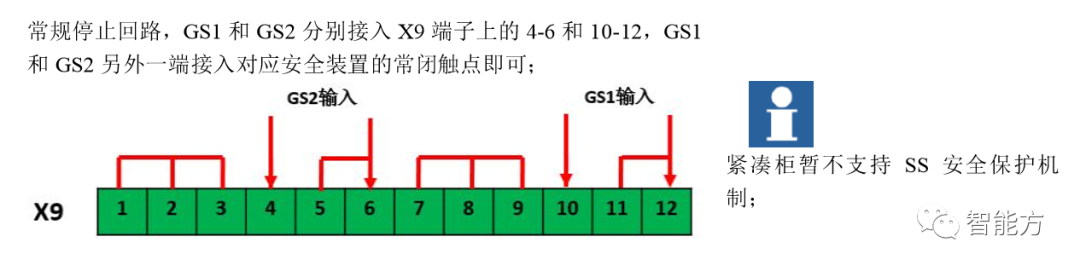
紧凑柜安全回路紧凑柜安全回路位置以及接线稍有不同,电气原理可参考本节末尾处 电路图:
标准柜安全保护机制电气原理图(一):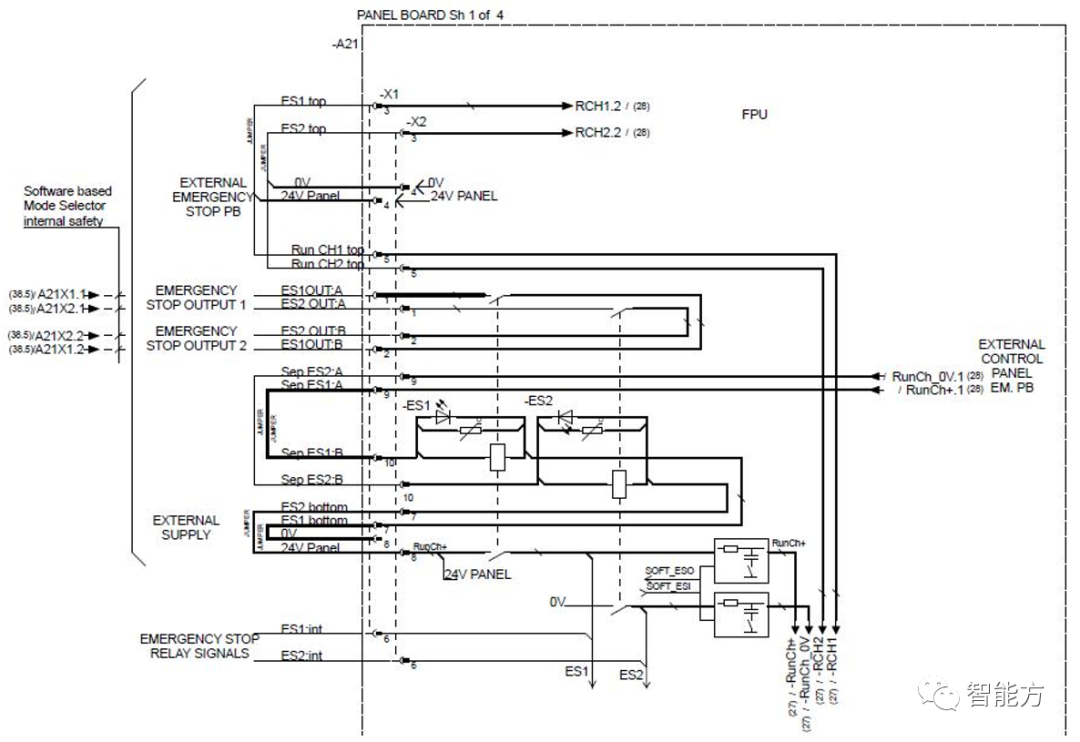
标准柜安全保护机制电气原理图(二):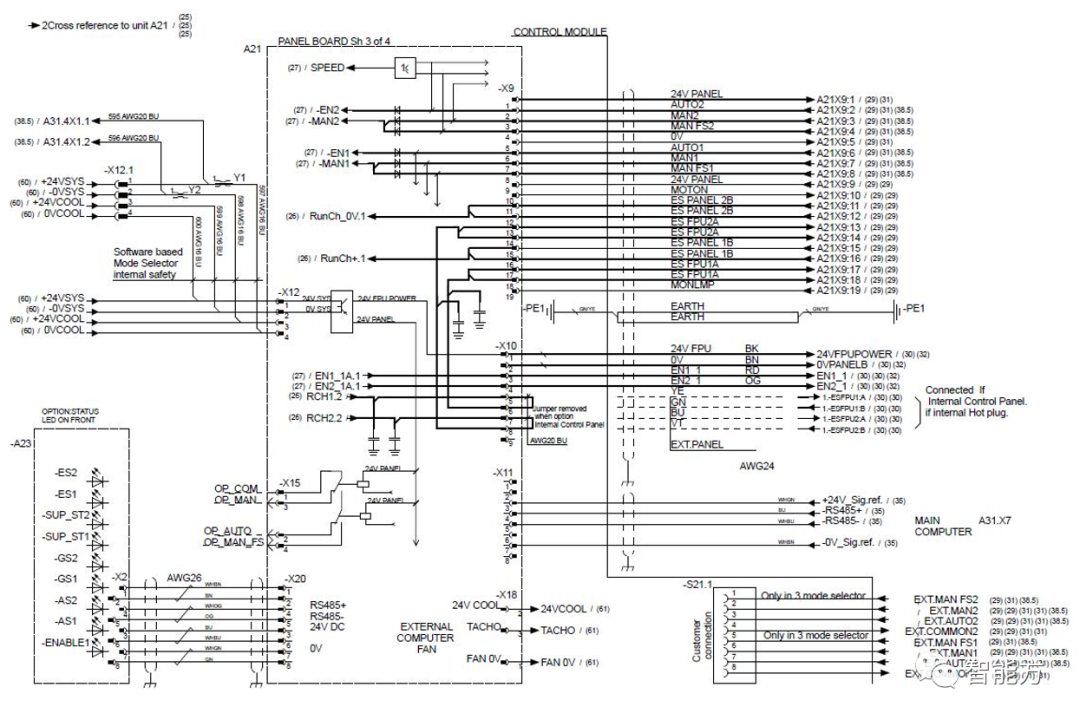
标准柜安全保护机制电气原理图(三):
紧凑柜安全保护机制电气原理图(一):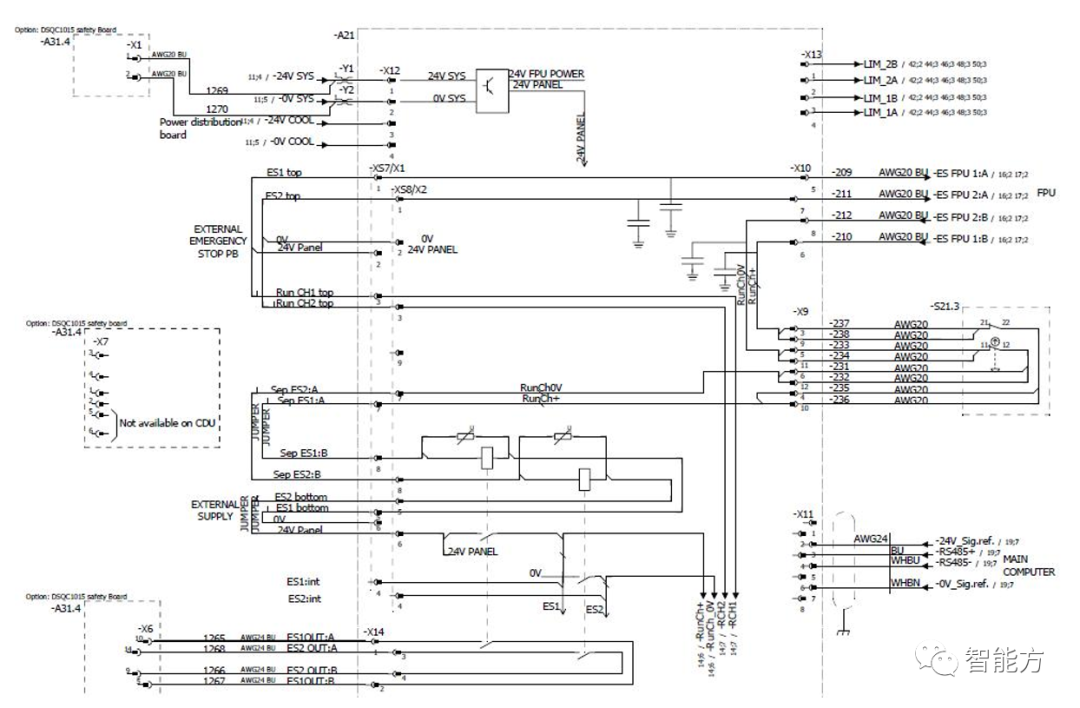
紧凑柜安全保护机制电气原理图(二):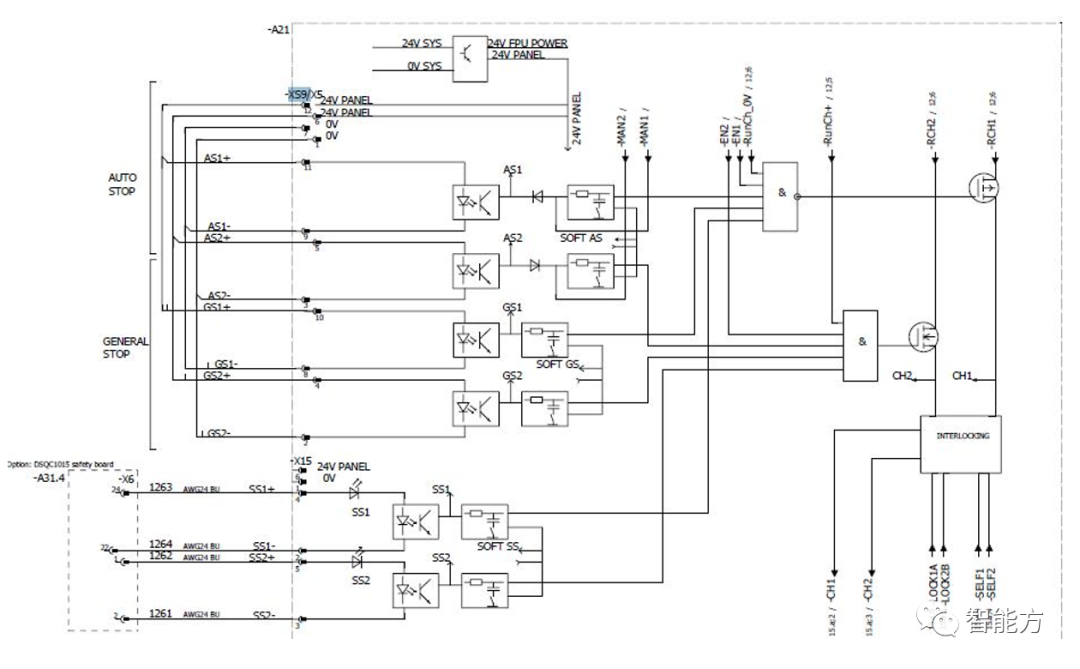
⇊ 往期回顾 ⇊
ABB机器人 Profinet 从站配置(888-3)
ABB机器人 CC Link 通讯设定(DSQC378B)
ABB工业机器人单独导入程序方法和步骤 | 创建信号及关联信号步骤
ABB 机器人DeviceNet通讯总线&《外围设备通讯》
ABB 机器人 Devicenet 主从站设置
ABB 机器人 | 输送链跟踪配置和编程步骤
ABB | 电机装置和齿轮装置(安装电机)
ABB 机器人 I/O通讯与配置实操应用技巧《第一期》
ABB 机器人 I/O信号监控与操作 Profibus与Profinet适配器的连接配置《第二期》
ABB 1410 | 机器人零点计数器更新(同步标记与轴同步位置)
ABB IRC5 Compact及IO配置介绍
ABB机器人 | 安装 I/O 装置
ABB机器人(新)I/O DSQC1030配置
ABB机器人 | 系统输入/输出与I/O信号的关联、示教器可编程按键的使用《第三期》
ABB 机器人 | 电机(加载配置文件) 确定齿轮装置的尺寸
ABB机器人标准保养+更换SMB电池+热启动机器人
如何添加ABB机器人添加外部轴(导轨)
ABB机器人弧焊培训与模拟量通讯
如何创建ABB机器人RobotStudio喷涂工作站
ABB IRB 14000 YuMi机器人校准(培训)
ABB机器人如何求两点间的距离
ABB机器人-偏移函数offs和reltool的区别
ABB机器人选项配置介绍大全
ABB机器人设置:碰撞检测
ABB 机器人 工作站的建立
ABB机器人 | 数据备份与恢复
ABB RobotStudio中的手动操纵《创建工业机器人工件坐标与轨迹程序》
ABB 使用Tab键完成RAPID快速辅助输入与机器人工作空间可视化查看
ABB SafeMove2的功能与硬件(手动操纵三步曲)


全球工业机器人品牌
品牌推广服务商 智能方
品牌合作
15900900380
您身边的机器人服务专家


点击图片进入机器人配件订购

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)