Isaac Sim学习记录五
·
在完成上一步的学习之后,已经可以单独做一个可以操控的小车了!但是这远远不够。接下来将学习 Import URDF Assets.
关于URDF:URDF是一种基于XML的文件格式,用于描述机器人的物理配置。它包含了机器人的连杆、关节、几何形状以及质量和惯性等物理属性的详细信息。
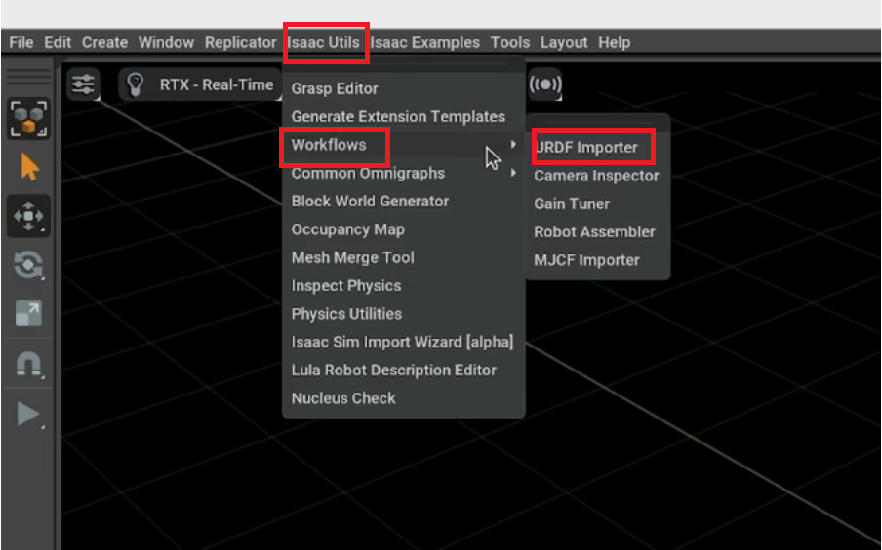
现在要到导入一个系统自带的名为“Carter”的机器人,按下图操作,然后滚轮往下找到Input里面的选择“Bulid in URDF Files-->robots-->carter-->urdf -->选择carter.urdf”
如果对着那个问号“?”标志右键打开Open in File Browser,就可以看到细则。
使用URDF导入器导入即可。
之后就是为其设置差分速度控制器。
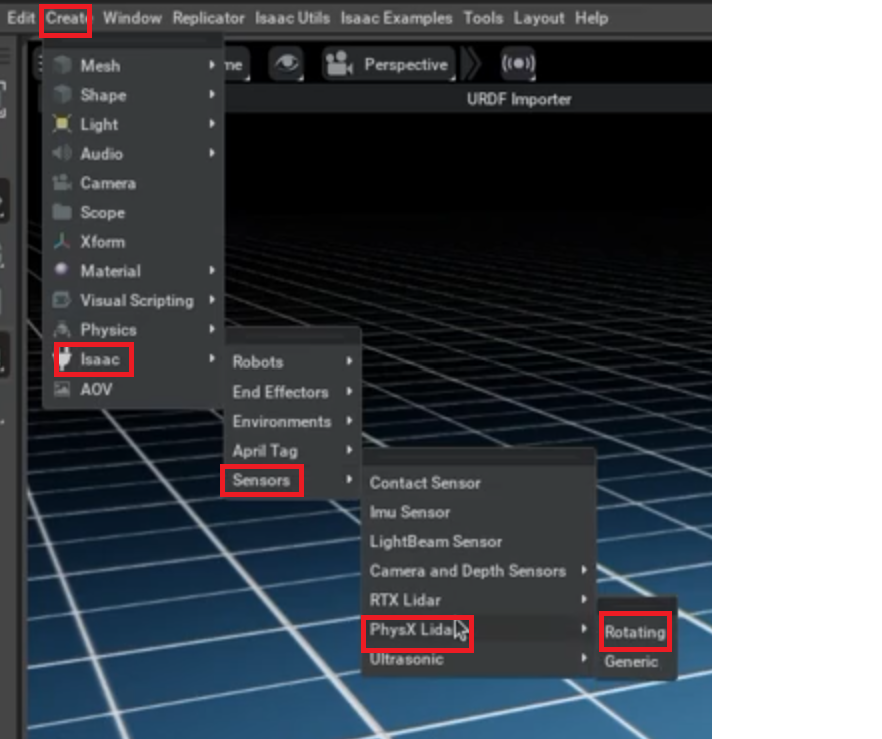
接下来是之前已经有过的配置摄像头环节和雷达环节,那就再来一遍。
在Carter这个Xform下左上角Create-->camera,将camera移到chassis_link,注意调整角度。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)