登录社区云,与社区用户共同成长
邀请您加入社区
先需要登录你的账号。
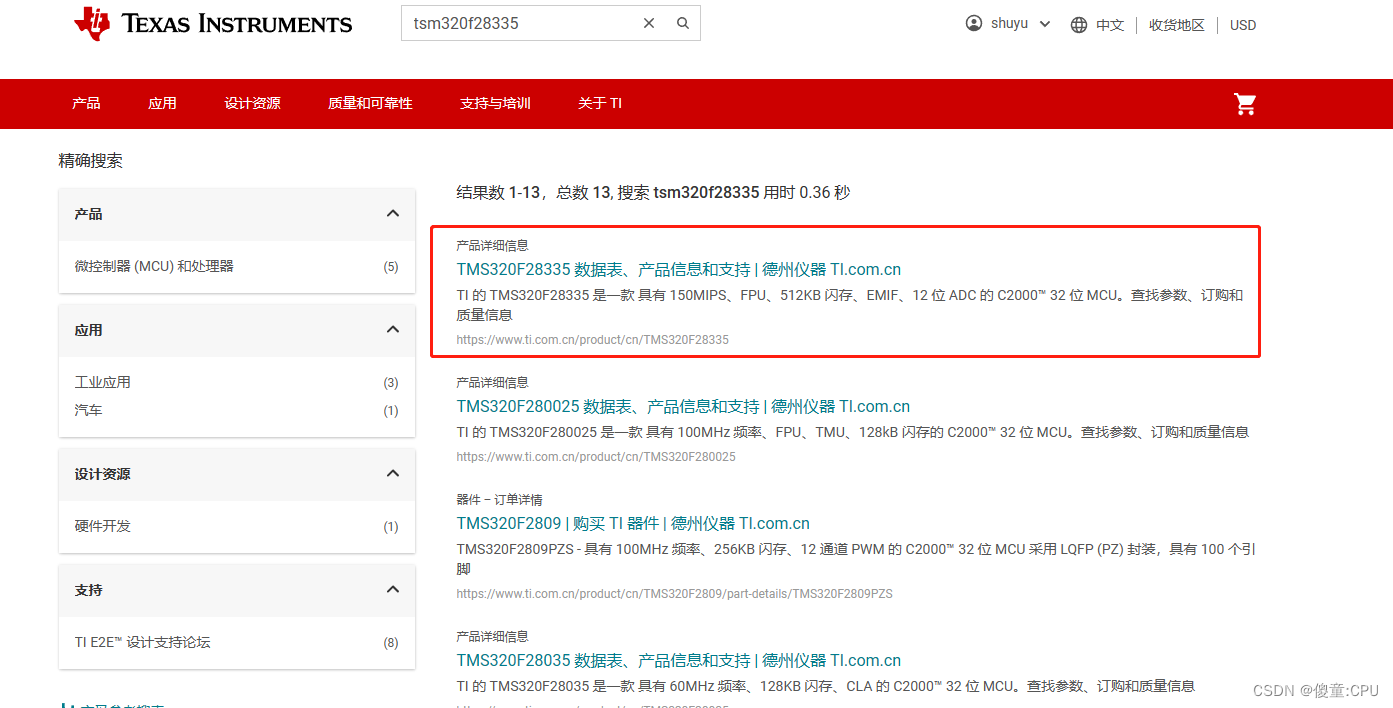
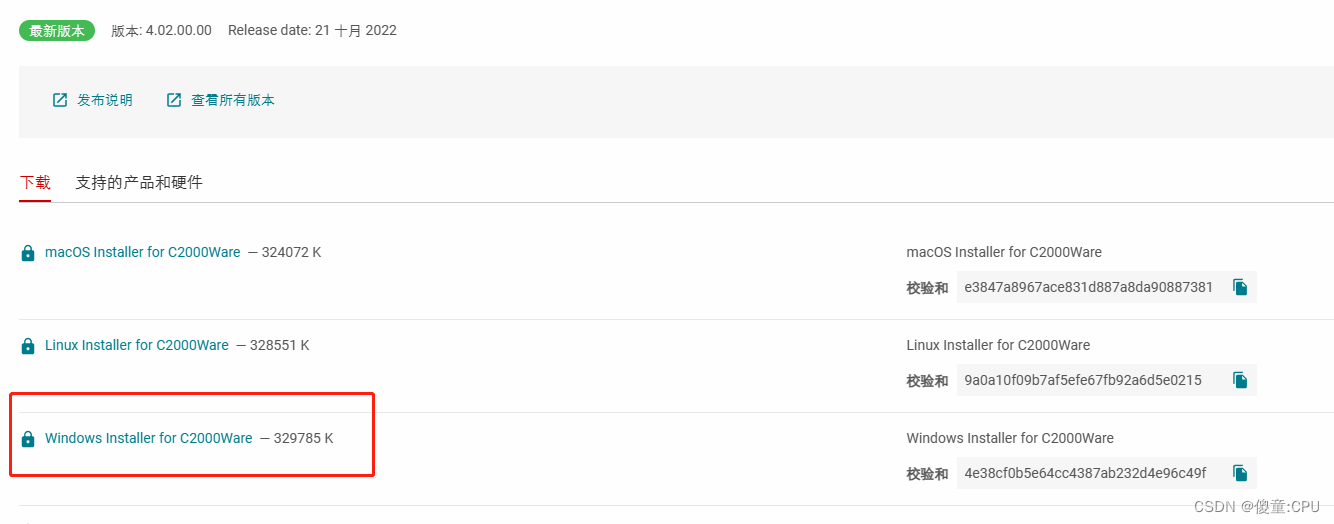
下载步骤
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
【无标题】
本文总结了工业互联网网络运维技术学习成果,重点围绕华为HCIA课程展开。课程通过VRP系统实训,系统讲解了工业互联网底层网络技术,涵盖路由、交换、安全及IPv6四大板块。在路由技术方面,掌握了静态路由、OSPF动态路由的配置及工业应用场景;交换技术重点学习VLAN划分、生成树协议及VRRP网关冗余;安全技术包括ACL访问控制、AAA认证及NAT地址转换。课程强调理论与实践结合,通过十余项实操项目深
被滥用的“世界模型”:李飞飞万字长文厘清渲染、模拟与规划的底层逻辑
但现实是骨感的,虽然现在的机器人演示视频看起来很惊艳,但几乎所有的系统都局限于高度受限的实验室环境中,任务时间极短、面对的物体极少。这也是当前最难啃的硬骨头:带物理标注的三维数据极其稀缺,且多物理模拟(如流体、布料、刚体的交互)的计算成本高昂。比如 World Labs 推出的首个模型 Marble,就已经打破了渲染器和模拟器之间的界限,能从单一模型中同时输出用于视觉观看的“高斯泼溅(Gaussi
触觉的中间道路:压力中心表示如何打通灵巧操作的Sim-to-Real鸿沟
摘要: 苏黎世联邦理工学院(ETH Zurich)与加州大学伯克利分校(UC Berkeley)的研究团队提出了一种基于物理的压力中心(Center-of-Pressure, CoP)触觉表示法,解决了机器人触觉Sim-to-Real迁移的难题。CoP将高密度触觉数据压缩为合力向量和等效接触点,既保留了力学信息,又对仿真偏差具有鲁棒性。该方法通过可微分应力分布模型和无需真值传感器的自校准技术,实现
扫一扫分享内容
为遵守国家网络实名制规定,未绑定将限制内容发布与互动









 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)