MiR机器人ROS仓库
github上发现的MiR机器人ROS仓库:GitHub - dfki-ric/mir_robot: ROS support for the MiR Robots. This is a community project to use the MiR Robots with ROS. It is not affiliated with Mobile Industrial Robots.1. 加载差
·
github上发现的MiR机器人ROS仓库:
1. 加载差动控制器differential drive controller的两种方式:
驱动的区别:使用libgazebo_ros_control方式下的控制器(需额外进行controller load操作)在速度命令停止后0.5秒停止运动,使用另外的diff_drive,速度命令停止后会以停止前的最后一条命令内容一直运动;
2. 仿真多激光融合:
<!-- create combined scan topic (like on real MiR) -->
<node pkg="topic_tools" type="relay" name="b_scan_relay" args="b_scan scan"/>
<node pkg="topic_tools" type="relay" name="f_scan_relay" args="f_scan scan"/>
3. 仿真输出数据过滤:
<node name="b_rep117_laser_filter" pkg="mir_driver" type="rep117_filter.py" output="screen">
<remap from="scan" to="b_scan" />
<remap from="scan_filtered" to="b_scan_rep117" />
</node>
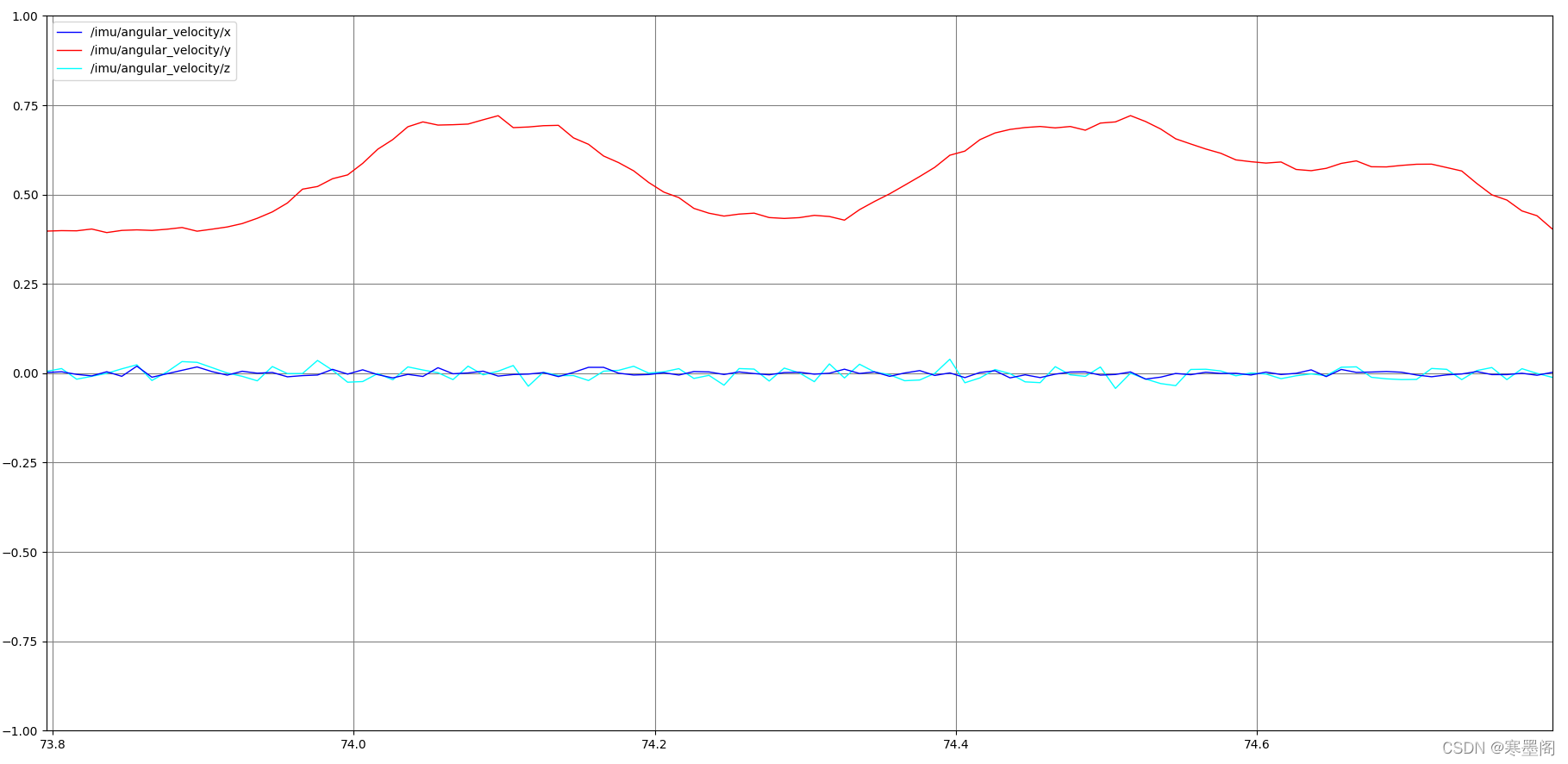
从运行情况看,仿真环境下,MiR imu输出中,MiR的高频噪声较小,如图:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)