工业机器人电路图讲解话术_【原创】西门子S7-1500如何控制雅马哈四轴机器人(上)...
1.1 学习机器人的前提条件
学习该内容前须掌握以下的几个知识点:
西门子S7-1500 PLC的基本知识,包括西门子系列PLC使用Profinet组态通讯的方式;西门子PLC中基本的数据类型组成(位,字节,字和双字),西门子PLC与第三方设备通讯后IO点映射的基本概念以及使用西门子PLC简单编写程序的能力。
1.2 机器人的简单介绍
雅马哈四轴机器人的四个轴分别是X轴,Y轴,Z轴以及R轴。具体的轴的位置见图1-1。
所有的四轴机器人基本上是有这四个轴组成的,所以我们对其有个基本的了解就行,学习机器人主要是学习机器人的控制器。
下图是雅马哈四轴机器人的示例图,可用于工业现场工件的抓取放置。

图1-1
控制面板
2 控制器面板介绍
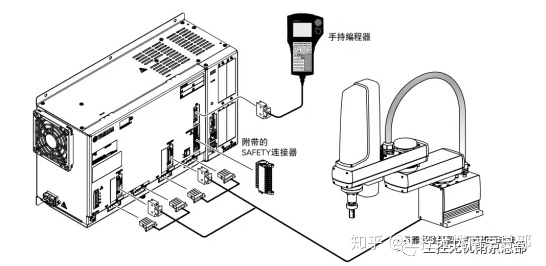
雅马哈四轴机器人的控制为RCX340,具体的控制器上各个接口的作用如下图所示:

图2-1
RCX340控制器是雅马哈机器人用来控制四轴机器人的控制器,它的外观可见图2-1。
上面的插头口分别是轴1控制接头,轴2控制接头,轴三控制接头,轴四控制接头。
选件板(主要用于和第三方通讯,此次项目中使用到的是PROFINET通讯)。Enthernet接口:用于控制器与PC通讯。PB接口:用于连接示教器。若没有选购示教器则接口处的插头也不能拔掉,因为插头中有厂家以及短接好的安全信号线。
电源端子:共两组220V交流电源,一组是控制器电源,一组是伺服马达电源。四组电池组:用于控制器的断电数据保持,若将其拔掉则会报电池错误。四组电池组分别对应四个伺服轴。
软硬
介绍
3.1 RCX340控制器接线操作
3.2 电路图
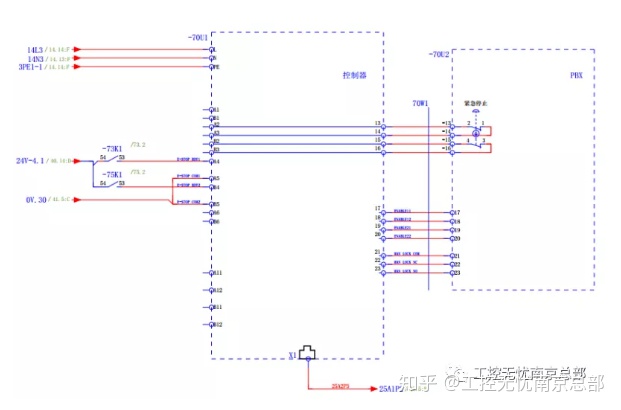
电路图中L,N和PE是控制器的外部220V电源,该电源用于给控制器供电。图中的A1-A6和B1-B6是控制器面板上的Safety信号,若不接外部控制信号则应将A1A2,A3A4,A5A6,B1B2,B3B4,B5B6相应的短接起来。
若需要接入安全信号或者急停则应按照上图所示的接法接入外部安全信号。至于右边的PBX接线则表示机器人示教器与控制器的接线,若选购了示教器则出厂时厂家会为你接好线,若没选购厂家也会为你将插头接口,所以这部分的接线图仅供参考学习。
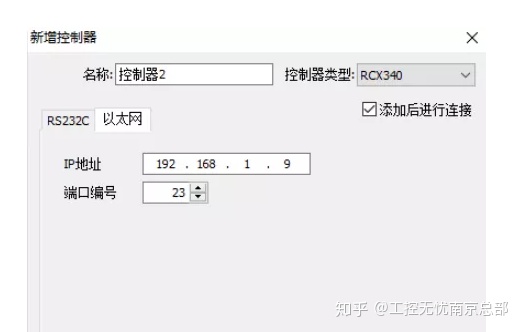
3.3 软件介绍
CX340控制器使用的编辑软件是RCX-Studio。注意该控制器的另一个软件为RCX-Studio Pro,该软件是RCX-Studio到升级版。该软件需要秘钥,如无秘钥使用RCX-Studio就行。下面我们来重点介绍该软件的使用方法。打开该软件,点击新建连接弹出如图2.2-1所示的界面,可使用网线连接。注意该控制器默认IP地址是192.168.0.2,端口号为23。
使用控制器RCX340可分为两种情况来控制,具体可分为通过PLC控制器以及不通过PLC来控制。若不通过PLC来控制则需手动在软件中将控制器的马达上电。而使用PLC来控制RCX340则需要在PLC程序中写上电程序和输入紧急停止程序。具体的手动步骤可见附件说明书的《RCX-StudioPro_C_V.1.16》中的第四节P14页联机操作。该章节介绍了使用该软件联机时的操作,包括与控制器的连接,伺服上电,原点回归,寸动移动,点位跟踪以及监控功能。将这一小节读完可完全掌握该软件常用的一些操作。
关于具体操作的【功能步骤】我们下一篇会进行详细的介绍,今天这一基础部分大家先消化一下,“地基”一定要打牢!
标签:电气、PLC、工控、西门子、1500、自动化、机器人、控制
文章来自“工控无忧南京总部”原创,如需转载请注明原创

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)