华数机器人旋转编程_盘点工业机器人基础知识
1.1 工业机器人系统的组成华数机器人系统包含以下四个部分组成:§ 机械手臂§ 连接线缆§ 电控系统§ HSpad 示教器1.1.1 工业机器人组工业机器人组全称是“工业机器人运动组”,运动组是一系列运动轴的组合。华数机器人有两个运动组,分别是工业机器人组和外部轴组。“轴”在这里并不是指工业机器人本体上某一根物理轴。在控制系统层面上,轴被视为电机、驱动器以及部分软件的组合,如下图 2:每一根轴都有
1.1 工业机器人系统的组成
华数机器人系统包含以下四个部分组成:
§ 机械手臂
§ 连接线缆
§ 电控系统
§ HSpad 示教器

1.1.1 工业机器人组
工业机器人组全称是“工业机器人运动组”,运动组是一系列运动轴的组合。华数机
器人有两个运动组,分别是工业机器人组和外部轴组。
“轴”在这里并不是指工业机器人本体上某一根物理轴。在控制系统层面上,轴
被视为电机、驱动器以及部分软件的组合,如下图 2:
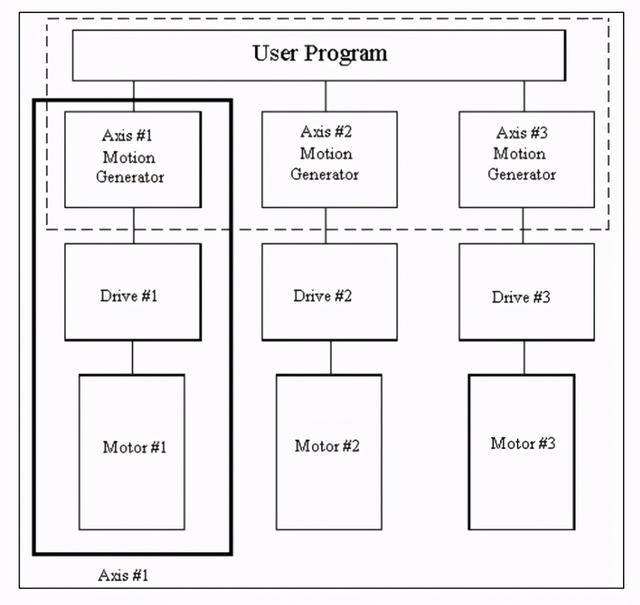
每一根轴都有一组由系统预先定义好的属性,这些属性可以用于计算位置
(或速度)指令、监测位置(或速度)限制等,控制器将运动指令发送到驱动器,
驱动器就可以据此控制轴的运动。
与之对应,运动组其实是一种数据对象,能使我们控制多根轴同步地完成运
动。运动组也有众多预定义好的属性,用于对组的运动情况进行控制。
我们在示教程序中经常会写出类似于下面的代码:
MOVE ROBOT P1
这里的 ROBOT 实际上就是一个运动组,即工业机器人组
1.1.2 选择外部轴组
如图 3 右侧为点动运行指示区域。默认情况下,显示的是工业机器人组的关节号
(A1、A2、A3、A4、A5、A6)。点击其中任意一个图标,都会显示运动组选择窗
口。选择外部轴组后,将显示组中所对应的名称,如 E1、E2,按下右侧对应的
按键即可运动对应的外部轴
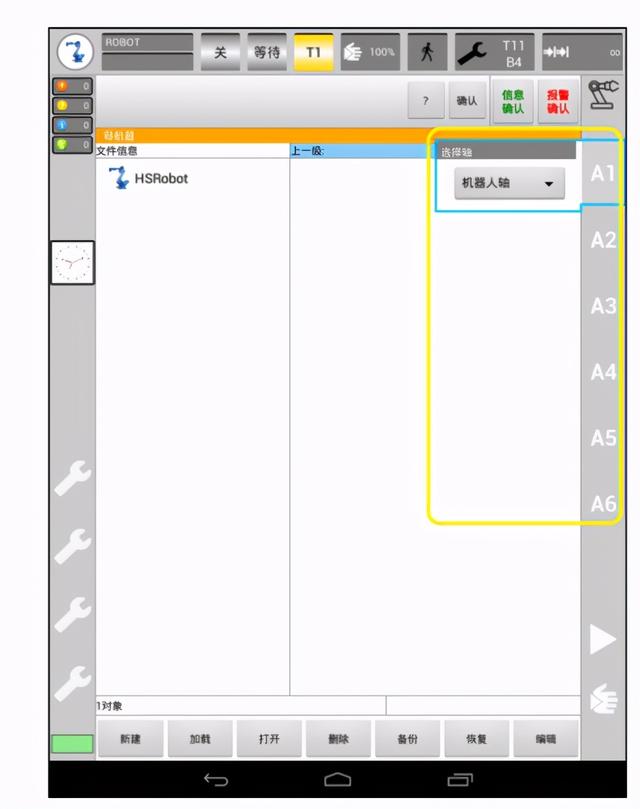
图 3
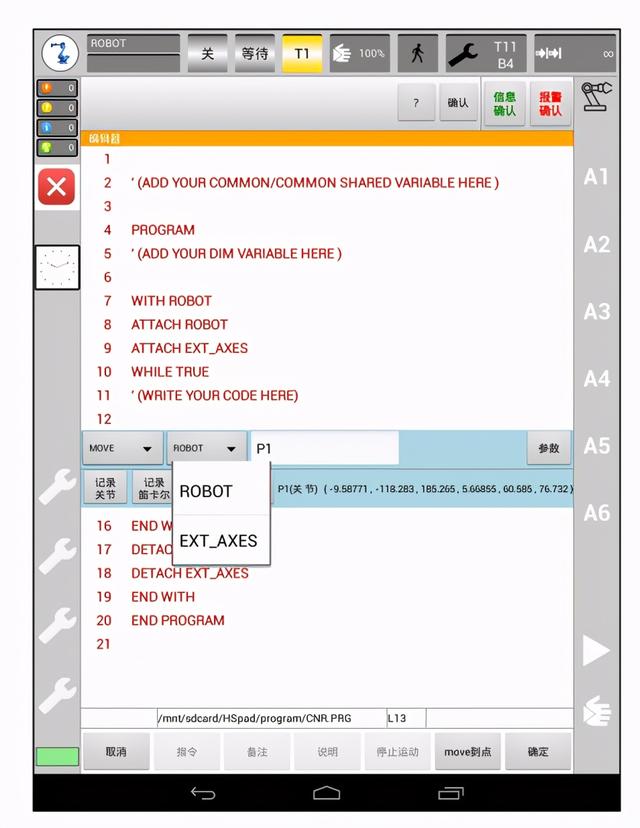
在程序中运动外部轴时,需要选择外部轴组,且外部轴暂时只能使用 move
指令,不能使用 moves 指令,点击“ROBOT”一栏,将弹出运动组选择下拉框,
选择“EXT_AXES”,然后记录关机即可,如图 4:
1.2 工业机器人坐标系
1.2.1 常用坐标系
在示教器中,共有四种坐标系可以选择,说明如下:
(1) 轴坐标系:轴坐标系为工业机器人单个轴的运行坐标系,可对单个轴进行操
作。
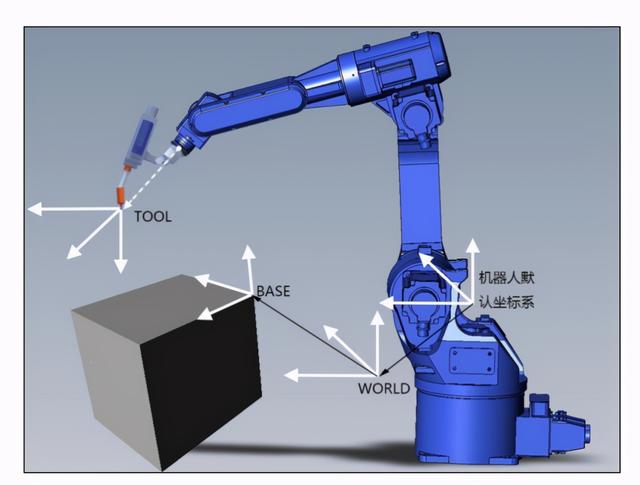
(2) 世界坐标系:世界坐标系是一个固定在工业机器人底座上的笛卡尔坐标系。
(3) 基坐标系:基坐标系是一个笛卡尔坐标系,用来说明工
件的位置。默认的基坐标系与世界坐标系一致。修改基坐标系的值后,即将基座
标系进行了偏移和旋转。
(4) 工具坐标系:工具坐标系是一个笛卡尔坐标系,位于工
具的工作点中。默认的工具坐标系在法兰中心点上,调用了一个工具坐标系实际
上是将工具中心点从法兰末端移动到工具的末端。
世界坐标系、工业机器人默认坐标系、基座标系、工具坐标系的关系,以图 5
表示为:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)