机器人导航路径平滑算法:一条符合机器人运动限制的路径
介绍机器人通过栅格地图进行路径规划时,根据静态障碍物得到全局路径,本阶段暂不考虑动态障碍物。通过各种路径规划算法,如 Dijkstra’s,A*,D-star,RRT等,规划出的路径都存在直线之间有急剧拐弯(曲率变化大)的问题。尽管通过将八邻域改为更多邻域,如前文所述,能略微改善曲率变化急剧的问题,但是这样的路径仍然不适于机器人运动模型,尤其是非全向机器人,如阿克曼底盘,所以需要一条符合机器人运动
文章转自 帅气的为为 https://zhuanlan.zhihu.com/p/364421182
介绍
机器人通过栅格地图进行路径规划时,根据静态障碍物得到全局路径,本阶段暂不考虑动态障碍物。通过各种路径规划算法,如 Dijkstra’s,A*,D-star,RRT等,规划出的路径都存在直线之间有急剧拐弯(曲率变化大)的问题。
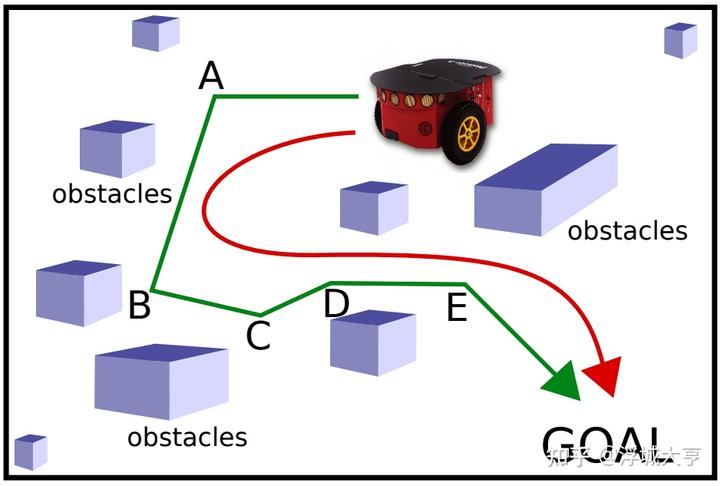
尽管通过将八邻域改为更多邻域,如前文所述,能略微改善曲率变化急剧的问题,但是这样的路径仍然不适于机器人运动模型,尤其是非全向机器人,如阿克曼底盘,所以需要一条符合机器人运动限制的路径。
路径连续性
连续性包括两个部分:几何连续 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/bdb7700196a46cdb1566a049e27cfe85.png) ,参数连续
,参数连续 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/fc704a3cc17199b8a41605f8193e3573.png) 。
。
几何连续指路径的多个片段的起始点相连,而且切向量的方向相同。
参数连续指路径的多个片段的起始点相连,而且切向量的方向和大小相同。
如果两曲线在点 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/1dcb592d2a749230dc8b6235f16a51b2.png) 处的第
处的第 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b1677f9423a31be742701330c190cf05.png) 阶导数相等,那么该两曲线在点 处是 连续,同时也是
阶导数相等,那么该两曲线在点 处是 连续,同时也是 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/96151c90d181ab6186d4460c3e805fd3.png) 连续的,对于
连续的,对于 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/769fd6a4c3ae6511fc7a7e68adde7608.png) 。总之,曲线
。总之,曲线 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/4aa2212c7a3ae4ce1b94a8e3bcb39211.png) 的
的 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ce59f55893efd960f1dbdfcd5c192a96.png) 阶导数
阶导数 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/bb2d0bcf4e1c243c84de6c178422af3e.png) 是连续的话,则是
是连续的话,则是 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ba8f6fb768afe35e4a55ca2b0e07f4ac.png) 连续曲线。
连续曲线。
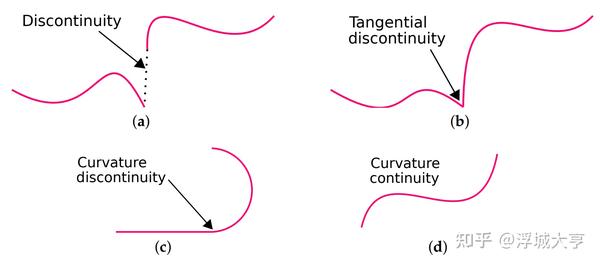
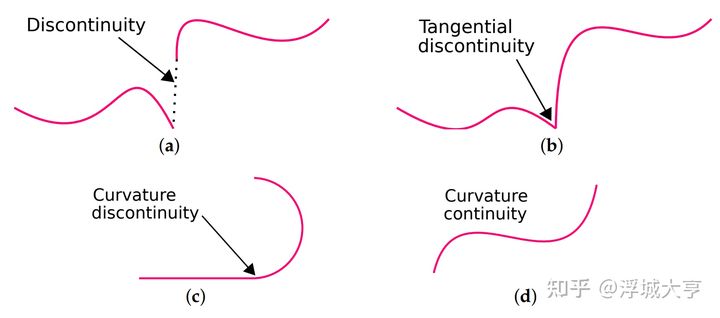
如上所述,参数连续意味着曲线和其参数化的平滑,而集合连续仅意味着机器人轨迹平滑。例如 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/eb52bf4e797273cd6b70c79e5bddf306.png) 连续意味着切向量连续,而
连续意味着切向量连续,而 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/1620aa371b0995d5d51a650b2c368a10.png) 连续意味着斜率连续;
连续意味着斜率连续;![[公式]](https://i-blog.csdnimg.cn/blog_migrate/5aacdec9361b39c9fc8e4572ef92bfc7.png) 连续意味着加速度矢量连续,而 连续意味着曲率连续。对于机器人运动来说, 连续保持速度, 连续保持加速度。对于机器人路径规划来说,关键是路径是否 或者 连续。高阶连续如
连续意味着加速度矢量连续,而 连续意味着曲率连续。对于机器人运动来说, 连续保持速度, 连续保持加速度。对于机器人路径规划来说,关键是路径是否 或者 连续。高阶连续如 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/38889df8ba0c7bca3e69681a2f211826.png) 主要处理面,用于 CAD/CAM 设计。
主要处理面,用于 CAD/CAM 设计。
插值法
- 多项式插值
对于 个点 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/db943e66960ed15f4f29611d4de7caf0.png) ,可以用拉格朗日(Lagrange)插值
,可以用拉格朗日(Lagrange)插值 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/c21eb5b73666b931c3f923126f3cade1.png) ,其阶
,其阶 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/0a347401b46f3fa0ab943b5368f1f543.png) :
:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/c21eb5b73666b931c3f923126f3cade1.png%3D%5Csum_%7Bj%3D1%7D%5E%7Bn%7D%7BP_j%28x%29%7D) ,其中
,其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/bea8e20b43ed9019e6644a056dcfdd49.png) 。
。
另一种是赫米特(Hermite)插值,定义 阶的 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/1dcb592d2a749230dc8b6235f16a51b2.png%28x%29) 在
在 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/2263d5e5a5933251e5baec596c490079.png) 处为0:
处为0:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/5892c174d6f596310d07552bfa794ce8.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/c8fde16a8797a22e40b7756ae0a32cce.png) ,其中
,其中 。
插值法用于路径平滑十分原始,有两个缺点:计算复杂度高;Runge’s 现象。
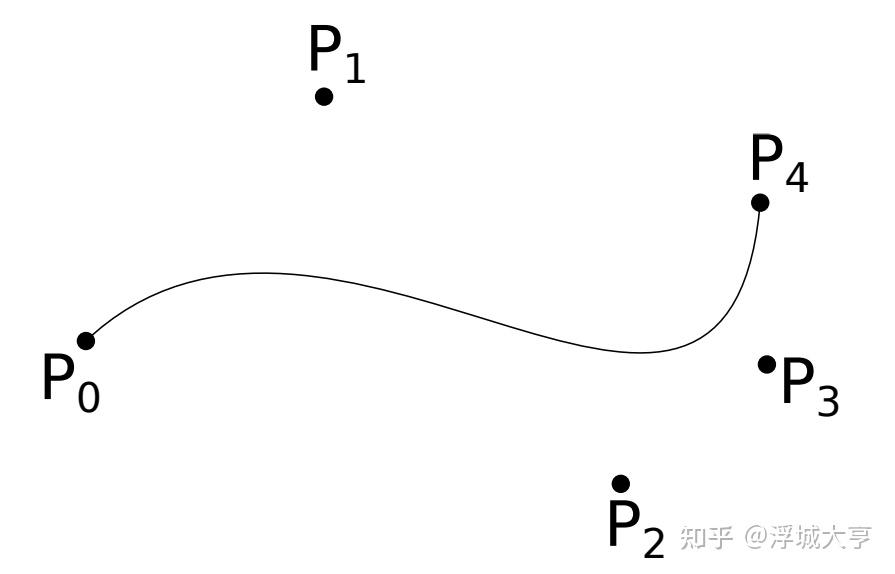
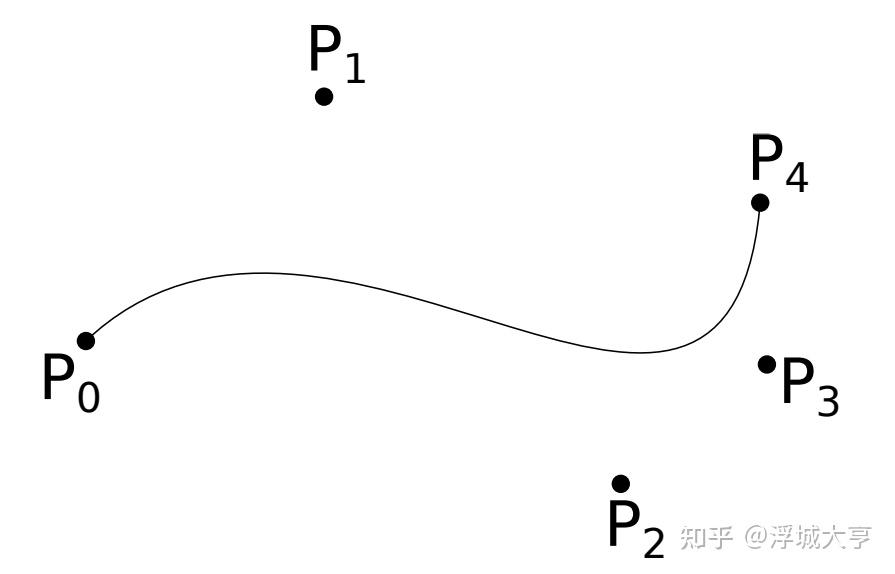
2. 贝塞尔曲线
对于 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ce59f55893efd960f1dbdfcd5c192a96.png%2B1) 个点
个点 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/2cb5e7a68c53a4268f5b36a7c14063ea.png) ,对应的贝塞尔曲线定义为:
,对应的贝塞尔曲线定义为:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/65752654ee4a6fc6ede8dd3434e91b70.png) ,其中
,其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/587d2bc80feae0ff49b20934506ff030.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/d52500a341c3698fafb5dd08d9b3bef0.png) 。
。
3. 三次样条曲线
样条曲线适合于对任意方程建模,对于低阶曲线也有较好的效果,能防止 Runge’s 现象。
有两个重要特点:用最小阶数就可以产生 近似;对于小曲率也是足够平滑。
考虑 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/9644dd42dae4db40bc8b42c5e213bb0c.png) 区间内有序的 个点
区间内有序的 个点 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/58d5e90382f3d8847d76c2893b398cd0.png) ,以及相应的分析
,以及相应的分析 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/c5c92d6987420af0d7123ca14e420ffa.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b1677f9423a31be742701330c190cf05.png%3D0%2C%5Ccdots%2Cn) 。因为该样条曲线是3阶的,其二阶导数必须是连续的,因此定义
。因为该样条曲线是3阶的,其二阶导数必须是连续的,因此定义 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/c5c92d6987420af0d7123ca14e420ffa.png%3Ds_3%28x_i%29) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/94ca14fb08624fd9da1bd0cfffe2d4e0.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/de12463ad42f683f1002fdce0e32646d.png) ,于是有:
,于是有:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/40d440f4269ec7acb878844a2957efb9.png)
其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/af2ef98ae16e1441a2b973ac589c5fd6.png) , ,并且
, ,并且
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/d19bf6c5329055c981cc3eace8d04a8a.png)
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ebb397f522c9499dae572f11c77adcbd.png) 可以从
可以从 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/4d1c242aafb8be1182c1b6561b484b64.png) 连续系统求得:
连续系统求得: ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/a62c0a0a747e9d9c4a46ca207eefdcb5.png) 。
。
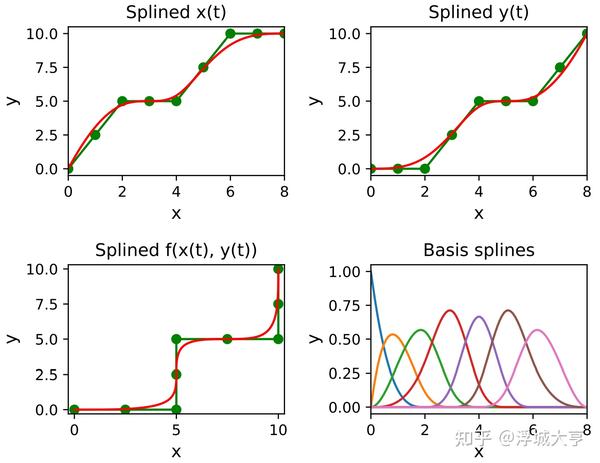
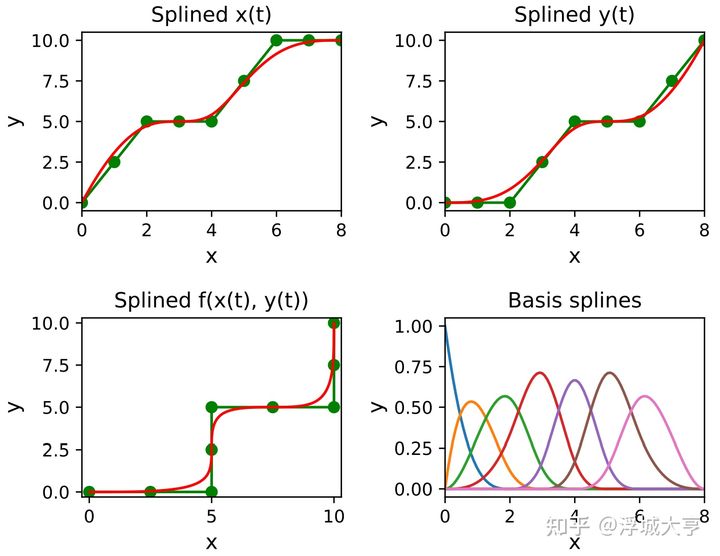
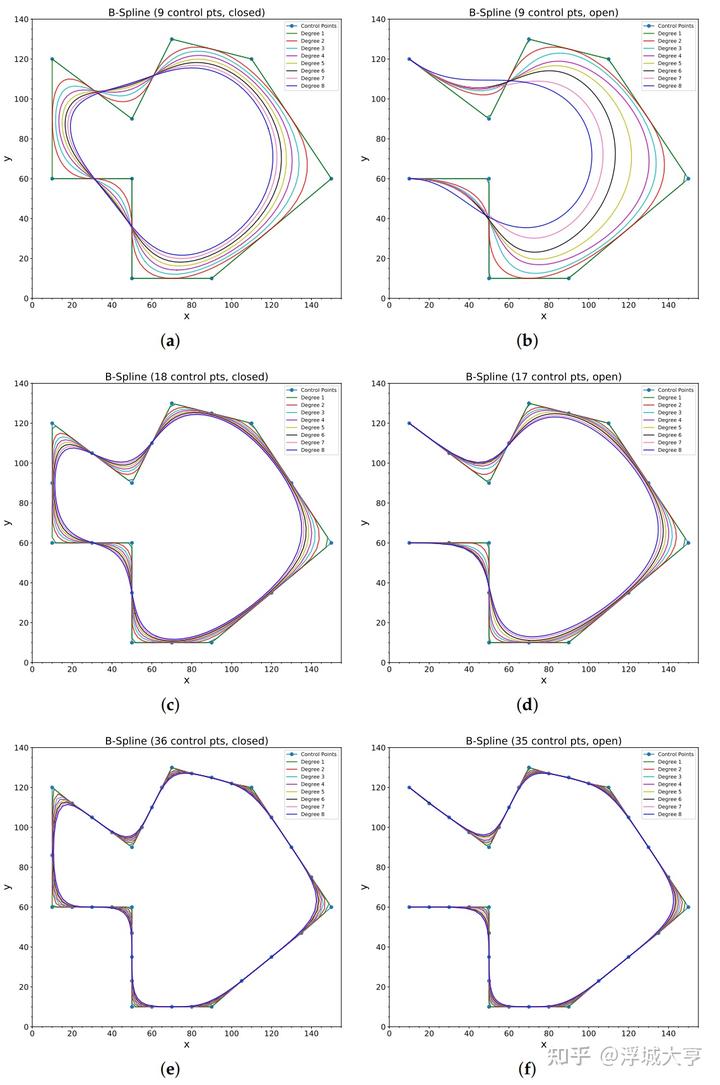
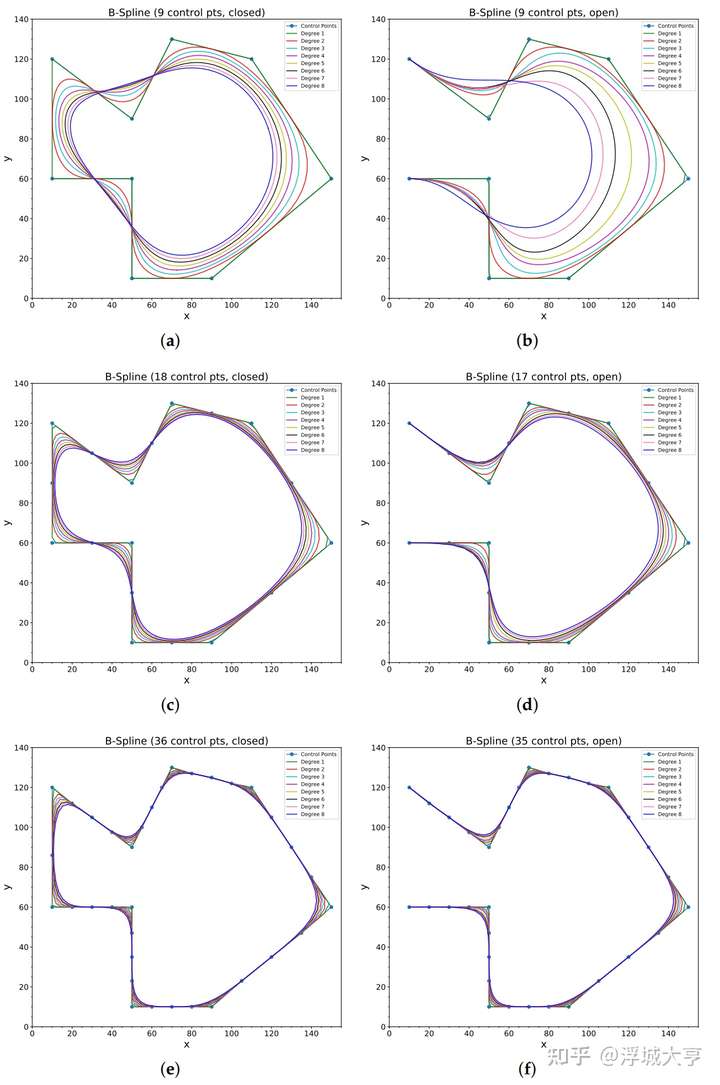
4. B样条曲线
给定 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/f79ab5c40ded11a5ecf9c3162bbd89d5.png) 个实数
个实数 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/55abd6ee2c07065bfd8875b4e79a1cf9.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b1677f9423a31be742701330c190cf05.png%5Cin+%5B0%2Cm-1%5D) , 阶的 B 样条曲线:
, 阶的 B 样条曲线:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/3ec0dff454a3ad462b7d84bb4087be01.png)
由基本的 阶 B 样条曲线 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ee19a8c1518771e86a50e2d4dad30236.png) 线性组成:
线性组成:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/6c154dcaf731352cdc5c26d7ab8713ae.png)
其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/3fe8ed650a3b02e14400504306d079ce.png) 称为控制点,
称为控制点, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/f79ab5c40ded11a5ecf9c3162bbd89d5.png-n-1) 个控制点形成一个凸包(convex hull),对于
个控制点形成一个凸包(convex hull),对于 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/8d3288a42f052646da63d5637b2b59ee.png) 这些基本 B 样条曲线定义为:
这些基本 B 样条曲线定义为:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/63cd611d76ec7113e61c312b203dd6b7.png)
当控制点的个数比阶数多一个时,例如 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/d70d6dd904251cd88b8ed9a312a90159.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/7d73cc88df5b9ab7f9ad68e8f2fd43d6.png) ,B 样条曲线退化为贝塞尔曲线。
,B 样条曲线退化为贝塞尔曲线。
5. NURBS 曲线
直接给定义:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/a7e093a007d4438728c51aa1e0260d0d.png)
其中 是阶数, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/466adfbc39518f7343fe3bf2eaaa5981.png) 是 B 样条曲线基本方程, 是控制点, 的权重
是 B 样条曲线基本方程, 是控制点, 的权重 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/989257b392c36e438d476e044156dc69.png) 是齐次点
是齐次点 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/3fe8ed650a3b02e14400504306d079ce.png%5Ew) 的最后一个维度。
的最后一个维度。
特殊曲线
- Dubin’s 曲线
给定平面内两点和运动方向,Dubins 用圆弧和线段在给定曲率范围内找到连接各点的最短平滑路径,如图所示。
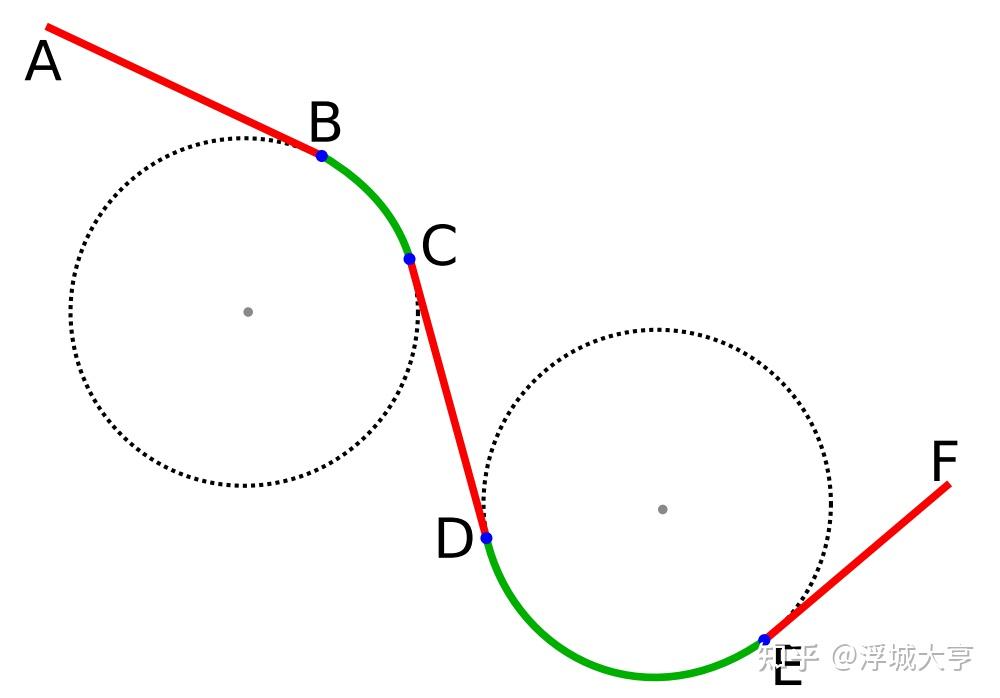
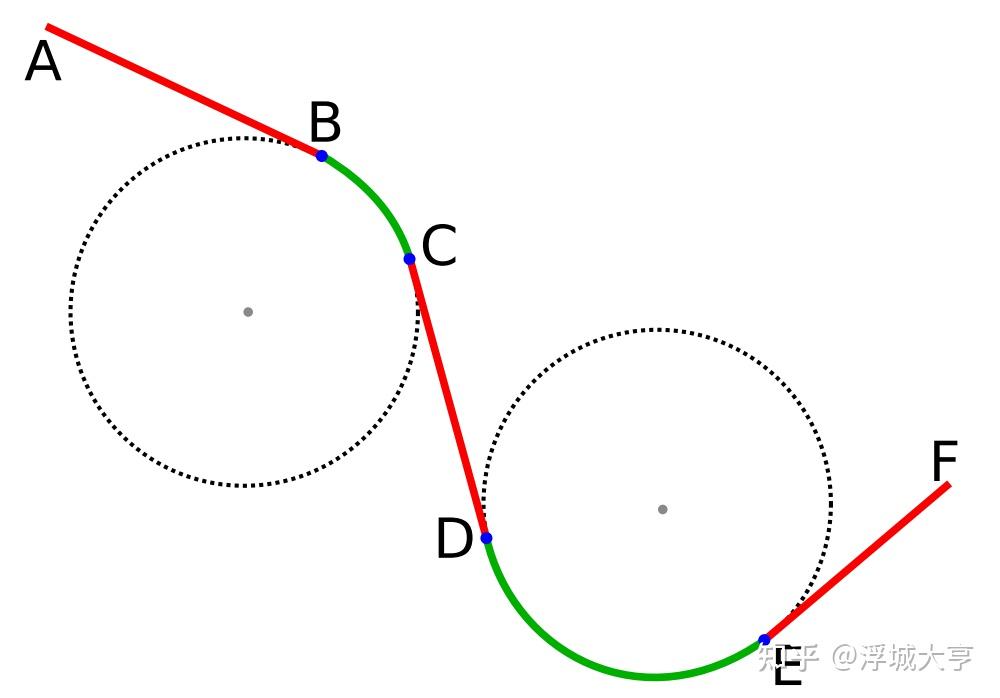
Durbin’s 曲线简单但是有效,适用于实时处理因为计算简单,可以用于回环线来满足各种不同限制。
首先介绍一个简单的车,如图所示。
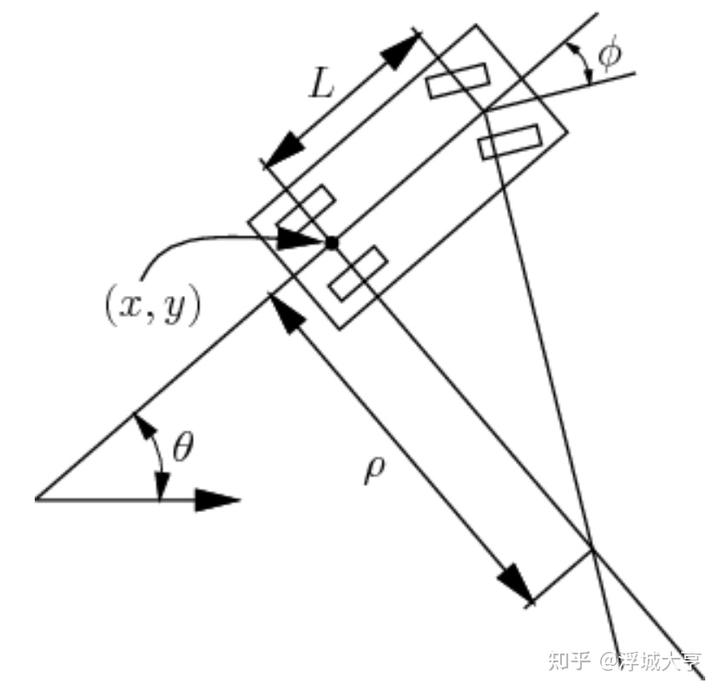
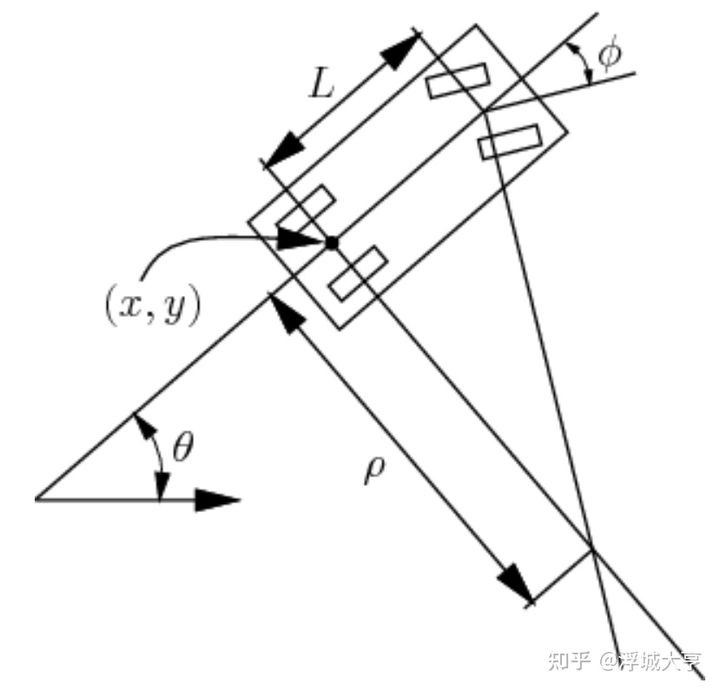
它的 C 空间 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/68f5b4fba80265130739437af7430544.png) ,定义为
,定义为 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/390226211bcb53282d3c46b1e53601ca.png) ,车子运动方程如下:
,车子运动方程如下:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/17844c8cd3d56bff5f74b6c3acb41b12.png)
时间间隔 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/feae18b3f5544e6dc2f0e1814fc0e8cf.png) 极小时,车子大致走后轮指向。 趋近于0,意味着
极小时,车子大致走后轮指向。 趋近于0,意味着 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/f93cd005ce2224d2537740032ff190ad.png) ,因为
,因为 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/48e7fe6a531fa4711624dc8f2a98c769.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/bc3b297fd2bed5cd4221e43d047829b3.png) ,于是有:
,于是有:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/aee5360743717a2dbeaec0a3a10263d5.png)
要满足该限制,方程的解为: ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/d4a0521b07ad960bac864a57900abafd.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/4323ce7b806198f7f1a72fee23bf00c0.png) , 为常数。
, 为常数。
下面解关于 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/406bdbb103fade5f51f52f56198c16ac.png) 的方程,
的方程, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/04da85034a607153310d1887b7e2936b.png) 为汽车转弯半径,
为汽车转弯半径, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/455a18a77579a28ec3c1154b5fb72c49.png) ,因为
,因为 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/04da85034a607153310d1887b7e2936b.png%3DL%2Ftan%5Cphi) ,有
,有
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/a9f36509067f721a5f4aa246475212ef.png)
两边同时除以 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/1d1e2abddbe73b8cc1d18d3767a9f0ae.png) ,因为
,因为 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/94cf165ada95b3efd1edbf3d252d696d.png) ,有
,有
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/7c6452e7a7cca03c7cb75c5d6be0b44a.png)
假定速度 和转向角 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/a84b1e00ae490f5dbf83f19fced51508.png) 等同于动作参数
等同于动作参数 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/0ba6a0a1f0603db66a314c2bd797d142.png) 和
和 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/9110cc073bc40e33cfebe4d677c25a65.png) ,动作向量
,动作向量 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/910e9904697fbd5cd7bf219dfa7e21ff.png) ,汽车动力学方程为:
,汽车动力学方程为:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ceeede9d725ea14636492d54601c57d9.png)
因为车子有最小转弯半径 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/04da85034a607153310d1887b7e2936b.png+_%7Bmin%7D) ,而路径规划的任务是最小化起点到终点的车子运动曲线,如果
,而路径规划的任务是最小化起点到终点的车子运动曲线,如果 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/04da85034a607153310d1887b7e2936b.png+_%7Bmin%7D%3D0) 那么就没有曲率限制,走两点间直线距离最短,但实际上需要优化
那么就没有曲率限制,走两点间直线距离最短,但实际上需要优化
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/9fdd3dc868669e8e1b7921e491537282.png)
,其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/3a66d98130a7647219357bdb5b8d81cd.png) 是到达终点
是到达终点 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/de368df09622f929c5e028fa94491312.png) 的时间,如果没有到达则
的时间,如果没有到达则 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/056ec5d0e6de1e1cbc9b3e57d5d010e2.png) 。
。
因为速度恒定,运动方程可以简化为:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ec1725ad7012a87f37c2b1c0d9336227.png)
其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ad57b04afaa64e4c3414210504fe8806.png) 属于区间
属于区间 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b31c9a575d851e71072a8e01bf9f7823.png) ,对于
,对于 ,以下结果都成立:
| Symbol | Steering: u |
|---|---|
| S | 0 |
| L | 1 |
| R | -1 |
在[1]中已经证明,在任何两个空间之间,Dubins 汽车的最短路径可以由不超过三个基本运动的组合表示,所以动作空间为 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/ad57b04afaa64e4c3414210504fe8806.png%5Cin%5Cleft%5C%7B+-1%EF%BC%8C0%EF%BC%8C1+%5Cright%5C%7D) ,只有如下六个关键词是最优的:
,只有如下六个关键词是最优的:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/4664f53d545e4c8d154814b9954caca5.png)
为了更加准确,要表示每个基本动作的持续时间。对于 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/600ccfe8e45e11592cb9c011c4107772.png) 或
或 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/cb0492f47c9c078bcaf8daff379b37af.png) ,加入下标表示转角,对于
,加入下标表示转角,对于 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/fe155e66ff2eb4d1ad15daa67055425e.png) ,加入下标表示距离,因此 Dubins 曲线可以更加精确的表示为:
,加入下标表示距离,因此 Dubins 曲线可以更加精确的表示为:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/dc95ffa52e67b7bd45e4f3e498638664.png)
其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b7116335d1b49d5d862c25bb9d9cc467.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/1c5910ed59ece1d6e5f67401cb48824c.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b7f48cce5437c126be52b12acec8a92d.png) 。如图所示两种可能情况。
。如图所示两种可能情况。


也可以用 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b75975e6596e86066ce396454448e274.png) 来代表曲线,即 或 ,那么6个词可以简化为仅2个词:
来代表曲线,即 或 ,那么6个词可以简化为仅2个词:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/eca09ece85ce5bfb7f282da3fb8969f7.png)
更准确的版本为: ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/f75c21e052bc1b68d85b8b9d0c9fdc29.png)
当 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/dfacceea1c7e9fad1cebefc2e43aa6a9.png) 时,分割如下图所示:
时,分割如下图所示:
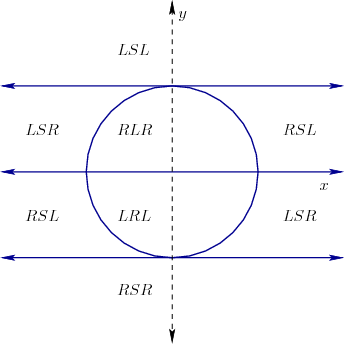
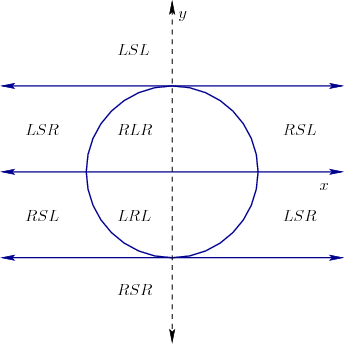
已有了关键信息,但是对于给定的 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/0aeeea48995860afbb9c54d6c5238781.png) 和 ,仍存在两个问题:
和 ,仍存在两个问题:
六个词中哪些可以生成最短路径?
对于某个词,相应下标的值 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b5edc03934564b6fc6a72b7804435505.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/137d4b8b4111fd48081f99c9794c6452.png) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/d6176aef248cf28709595e799ff4c7d9.png) 是多少?
是多少?
一个简单的方法就是穷举法,如图所示。
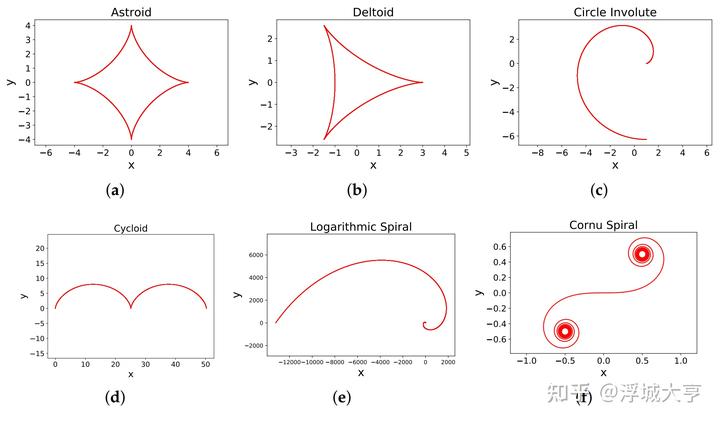
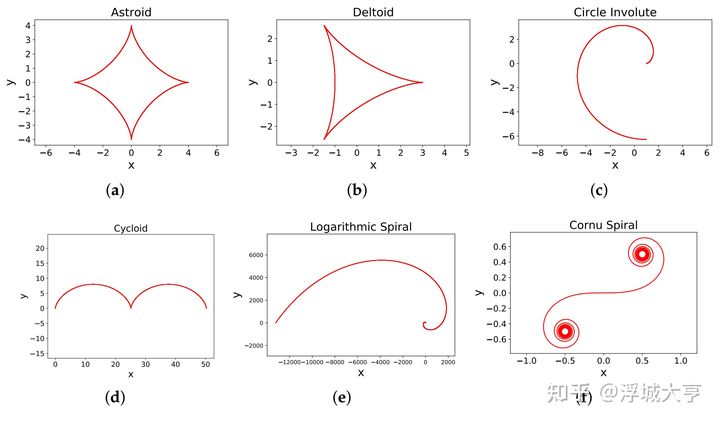
2. Clothoid
Clothoid,也被称为欧拉螺旋线或者 Cornu’s 螺旋线,表示在复平面:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/78a9a7184f0fbf73deb0609dcdfc12ca.png)
其中 和 是菲涅尔函数,有时候也成为菲涅尔余弦积分和菲涅尔正弦积分。
当 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/608992d4a456545739bc9afc3e33ec3f.png) 时两个菲涅尔函数都趋近于
时两个菲涅尔函数都趋近于 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/d6fc159c61052bed63f05623d65d46d2.png) ,所以这个曲线逐渐趋近于第一象限
,所以这个曲线逐渐趋近于第一象限 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/c8cb1f96e3910e77f4e740070c877eb8.png) ,对称的来说,因为两个方程都是奇函数,这个曲线逐渐趋近于第一象限
,对称的来说,因为两个方程都是奇函数,这个曲线逐渐趋近于第一象限 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/eec4eb4b3e39ce8ac4f41d14fe720133.png) 。
。
Cornu’s 螺旋线的曲率和曲线距离成正比,因此车子的角加速度恒定,意味着驾驶员匀速转动方向盘即可,更加安全。
3. Hypocycloid
当一个半径 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/851bc9afe9b3ffeea7eb6cd7d9d9d8fc.png) 小圆在大一点的半径
小圆在大一点的半径 大圆内滚动时,小圆上的某固定点产生:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/a2cac79b15685db49b0700a0630815cb.png)
其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/52f604df752ab3306ce22892eb63dd0a.png) 是峰点(曲线不可导的地方)的个数,
是峰点(曲线不可导的地方)的个数, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/a75f283facc069c9ca4e7a0851008294.png) 是两圆半径比即
是两圆半径比即 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/a75f283facc069c9ca4e7a0851008294.png%3D%5Cfrac%7Br_s%7D%7BR_L%7D) ,例子如图所示
,例子如图所示
如果在 hypocycloid 内有 个峰点,小圆半径则为 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/851bc9afe9b3ffeea7eb6cd7d9d9d8fc.png%3D%5Cfrac%7BR_L%7D%7Bn%7D) ,因为小圆转 圈回到原点,也就生成 个峰点。
,因为小圆转 圈回到原点,也就生成 个峰点。
有一种新的方法成为 Smooth Hypocycloidal Paths(SHP),可以生成任何角度,该算法用来尽量保持直线路径,只平滑急转弯处,例子如图所示
4. Reeds-Shepp Curves
和 Dubins 相似,直接给运动方程:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/99b5f78930dccc16c5188916ebe54087.png)
其中 ,
。第一个变量
决定变速箱向前(
)或向后(
),为了简化假定
, 对于所有
都成立。
因此词袋为:
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/b3dee16f3b83193ef8f49d90523eaf69.png)
其中 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/32e82ce64222e50fdbafaab5b19a7aec.png) 表示变速箱逆向,即向前到向后,或向后到向前。
表示变速箱逆向,即向前到向后,或向后到向前。
下图举例 。
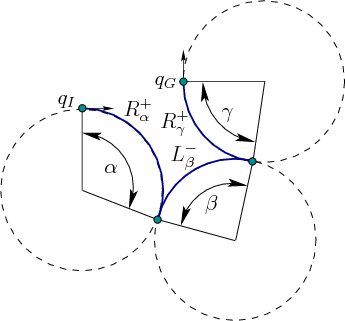
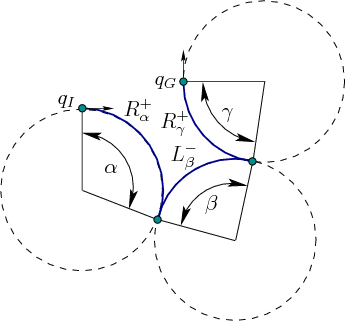
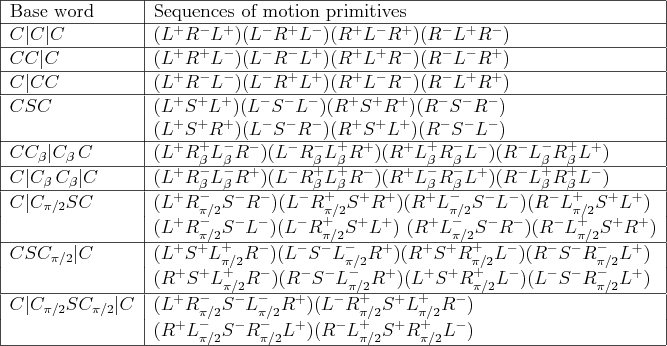
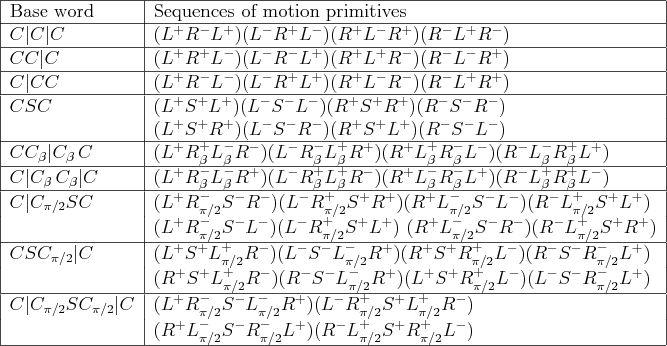
下表为 Reeds and Shepp 的48种不同曲线,然而第一行的 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/600ccfe8e45e11592cb9c011c4107772.png%5E-+R%5E%2B+L%5E-) 和
和 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/cb0492f47c9c078bcaf8daff379b37af.png%5E-+L%5E%2B+R%5E-) 可以被剔除,因此只有46种。
可以被剔除,因此只有46种。
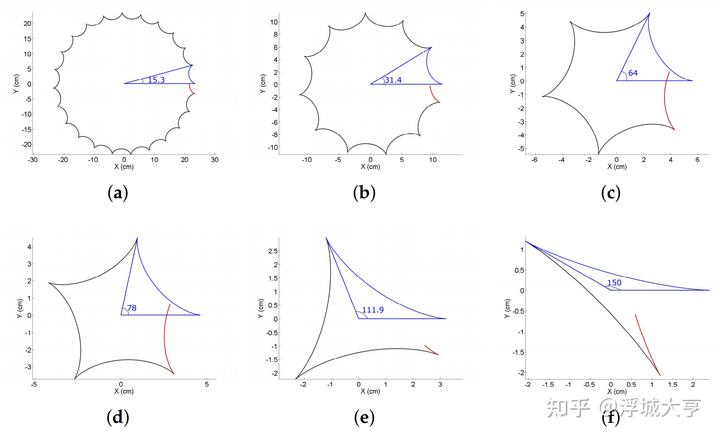
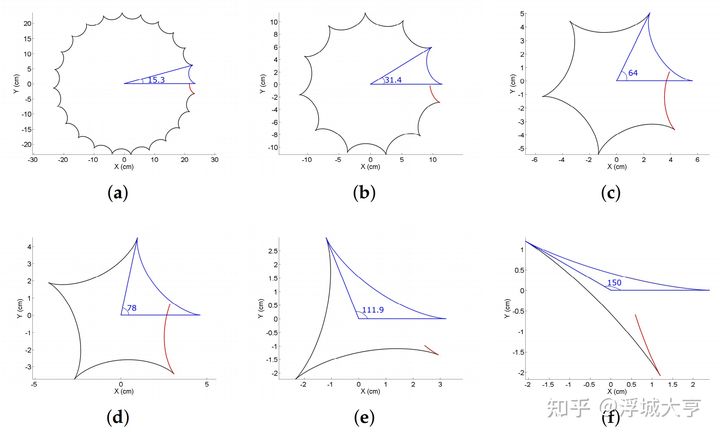
5. Balkcom-Mason 曲线
将动作集定义为 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/4a6a7e31bdf41dcfbbb8da689bf07885.png) ,优化方程
,优化方程
![[公式]](https://i-blog.csdnimg.cn/blog_migrate/501ee94670c19d4e4008f551787bbedb.png)
因此可以有四个基本运动:
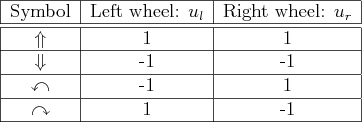
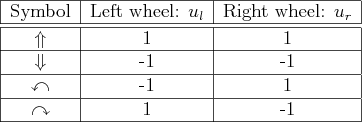
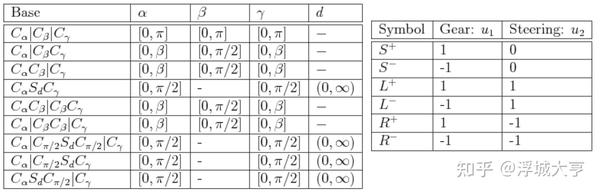
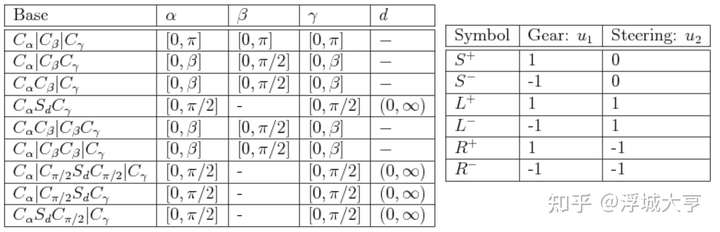
可证明得出最短路径最多由五个基本部分组成,因此有9个词即:


准确形式由下表给出:
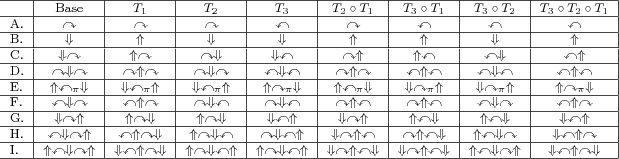
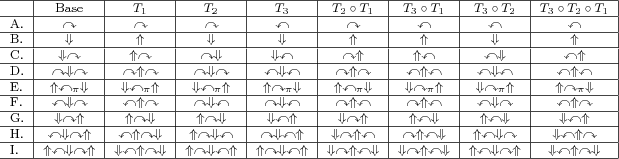
为了显示的更易懂,给出九种运动模型图:
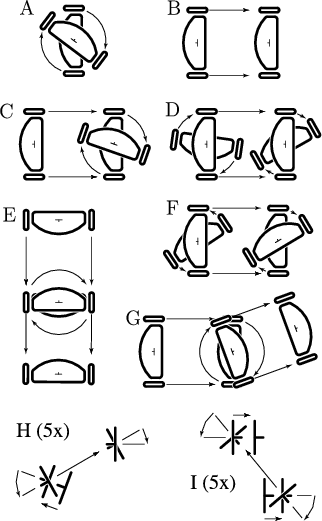
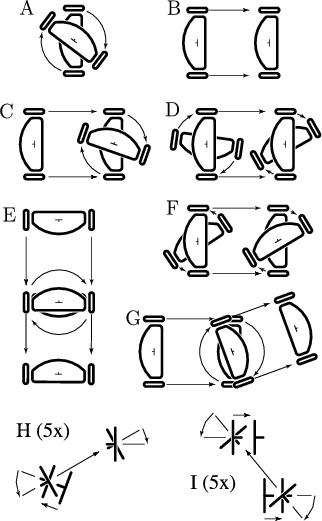
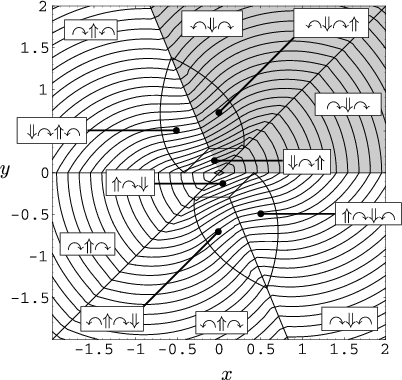
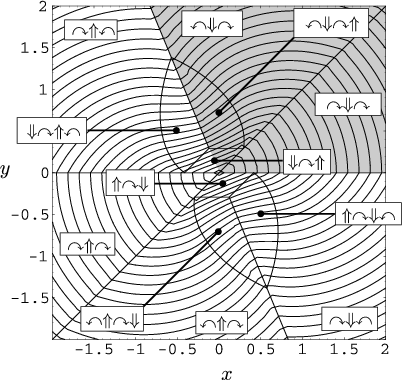
当 ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/0aeeea48995860afbb9c54d6c5238781.png%3D%28x%2Cy%2C%5Cfrac%7B%5Cpi%7D%7B4%7D%29) ,
, ![[公式]](https://i-blog.csdnimg.cn/blog_migrate/de368df09622f929c5e028fa94491312.png%3D%280%2C0%2C0%29) 时,最优曲线如图所示:
时,最优曲线如图所示:
[1] Dubins, L.E. (1957) On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents. American Journal of Mathematics, 79, 497-516.

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)