机器人重复定位精度验证
要验证重复定位精度前需先确认机器人原点姿态是否正确,可先将机器人打到【0°,90°,0°,0°,0°,0°】的姿态,再用原点销依次对每个轴确认原点销是否可顺畅塞入、取出,如有异常,请先对“编码器复位”。通常遇到机器人定位不准问题都是在调试后期带料组装时发生的,这时候手臂治具安装和接线已完成,将其拆除会耗时耗力,此时如果使用千分表验证需要将千分表测头打到靠近机器人法兰面处,以减少误差。千分表测量时可
重复定位精度即机器人运行多个不同姿态点位后再回到一个固定位置后的偏差,该数据大多会在式样书中体现,如Nachi的MZ07的重复定位精度为±0.02mm
要验证重复定位精度前需先确认机器人原点姿态是否正确,可先将机器人打到【0°,90°,0°,0°,0°,0°】的姿态,再用原点销依次对每个轴确认原点销是否可顺畅塞入、取出,如有异常,请先对“编码器复位”。
通常遇到机器人定位不准问题都是在调试后期带料组装时发生的,这时候手臂治具安装和接线已完成,将其拆除会耗时耗力,此时如果使用千分表验证需要将千分表测头打到靠近机器人法兰面处,以减少误差。
测量重复定位精度的常规方法:
先确认治具本身是否牢固可靠,可在治具末端测试用手晃动后治具是否依旧稳固。
1.千分表
千分表测量时可分别对机器人法兰面和治具末端两处分别测量,一是确认机器人本身精度,二是也可验证治具是否稳固可靠。
2.相机
大多数精度要求高的项目会配备相机,我们可以找一个mark点进行识别,在机器人运行一套点位程序后再由相机识别mark获取偏差值来验证。但依旧先需确保治具在动作过后停到拍照位时不抖动,我们可在拍照位晃动治具,观察相机成像画面是否有晃动。
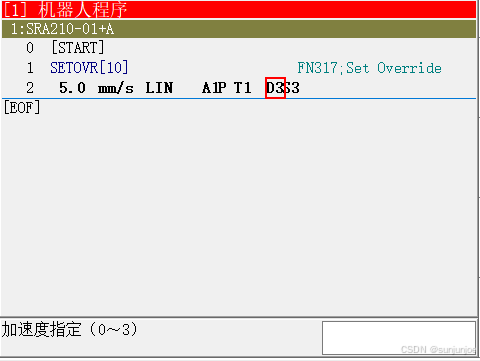
要减少治具晃动产生的偏差,可在需要精确定位的动作点位前先降速【SETOVR 10,将整体速度调整为10%】,并且这些点位的“加速度”和“平滑度”参数改为D3和S3。
补充:
在有相机的项目中在标定、模板取像后,建议单独新建一个程序,在工站内找一个有mark的固定位置记录并拍照,这样以后出现机器人不准时可以回到这个点,观察设备是否是因碰撞导致偏差。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 9
9 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)