域添加另一台机器_机器人输送带上下料虚拟仿真操作方法 | ROBOGUIDE软件
概述在机器人生产线上,机器人不只是作为上料设备,还可以作为下料设备。除了各种机床的上下料以外,输送带上下料也是非常常见的。机床上下料应用中通常都是一台机器人完成上下料任务,而输送带上下料通常为多台机器人协同完成上下料工作,如一台机器人将加工好的半成品放置到输送带上转运至下一工位,机器人再从输送带上抓取上一工位转运来的半成品放置到本工位上;另一台机器人将本工位加工完成的工件放置到输送带上,...
·
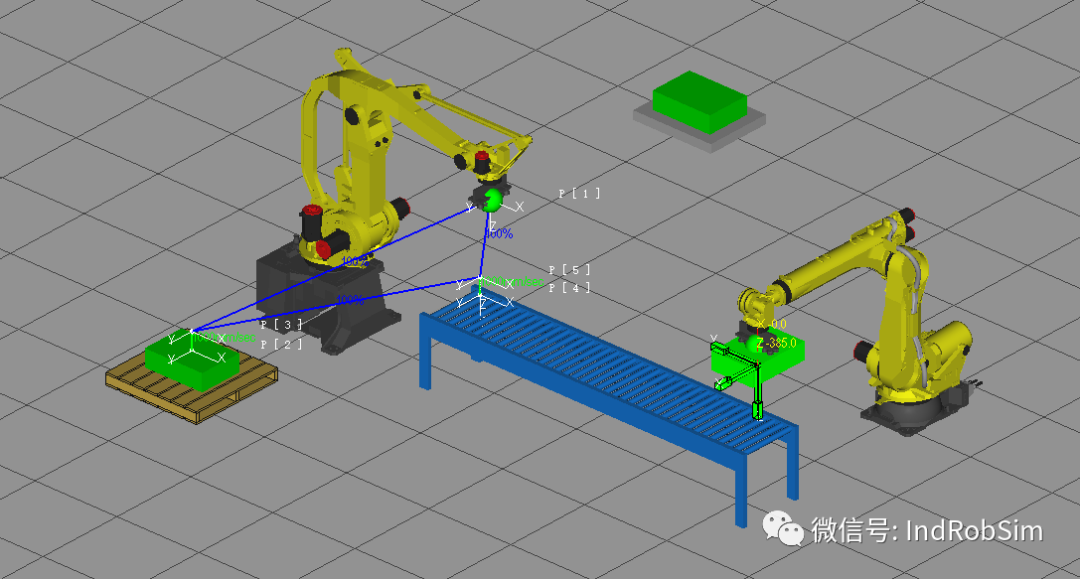
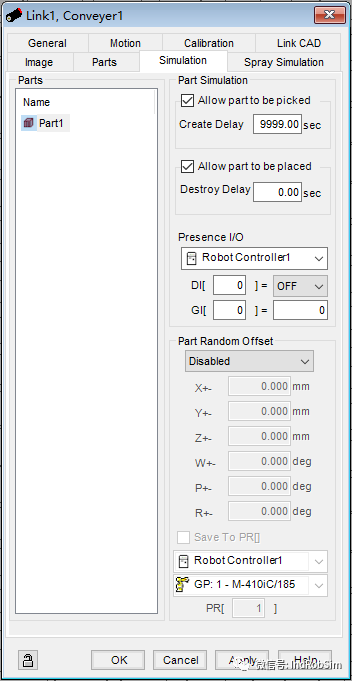
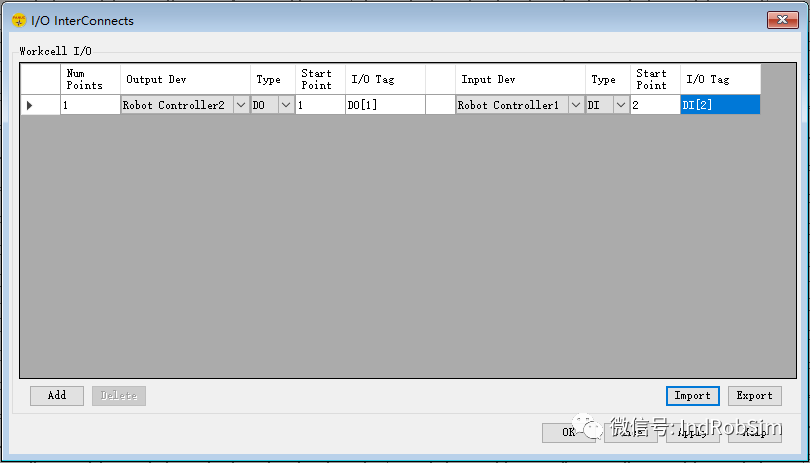
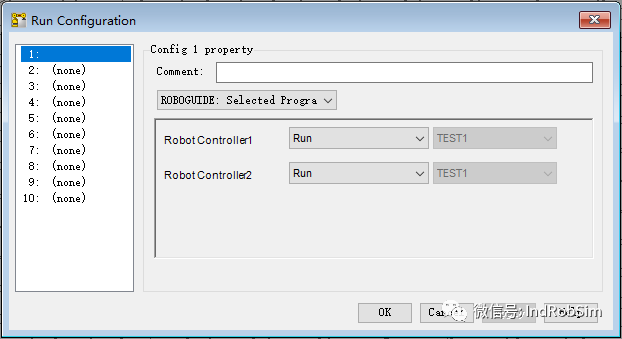
概述在机器人生产线上,机器人不只是作为上料设备,还可以作为下料设备。除了各种机床的上下料以外,输送带上下料也是非常常见的。机床上下料应用中通常都是一台机器人完成上下料任务,而输送带上下料通常为多台机器人协同完成上下料工作,如一台机器人将加工好的半成品放置到输送带上转运至下一工位,机器人再从输送带上抓取上一工位转运来的半成品放置到本工位上;另一台机器人将本工位加工完成的工件放置到输送带上,然后再将上一工位转运来的半成品放置到本加工位以完成新的加工工序,如此周而复始、循环往复实现生产线的自动运行,从而完成工件的加工制造。因此,机器人输送带上下料应用也是非常重要的。上一期为大家介绍了机器人输送带上料虚拟仿真的操作方法,本期再来为大家介绍一下输送带下料仿真的操作方法。添加机器人在上一期发布的《ROBOGUIDE软件:机器人输送带上料虚拟仿真操作方法》文章的仿真案例项目中添加一台6轴下料机器人。软件“Cell”下拉菜单中依次点击“Add Robot”→“Single Robot-Serialize Wizard”,然后通过机器人系统创建向导创建一台新机器人。将新添加的机器人布局到输送带另一端的下料位置处,参考《ROBOGUIDE软件:机器人输送带上料虚拟仿真操作方法》文章中的相关步骤,为机器人安装一个吸盘工具,然后再把工件安装到吸盘工具上,并配置相应的属性参数。工件在工具上的安装姿态要与工件在输送带上的安装姿态保持一致。
相关阅读 | 喷涂应用仿真相关阅读 | 去毛刺应用仿真相关阅读 | 2D视觉应用仿真相关阅读 | 伺服点焊应用仿真相关阅读 | 带变位机弧焊应用仿真相关阅读 | 机器人高速拾取工作站应用仿真上一篇 | 机器人输送带上料虚拟仿真操作方法


相关阅读 | 搬运应用仿真
相关阅读 | 码垛应用仿真相关阅读 | 喷涂应用仿真相关阅读 | 去毛刺应用仿真相关阅读 | 2D视觉应用仿真相关阅读 | 伺服点焊应用仿真相关阅读 | 带变位机弧焊应用仿真相关阅读 | 机器人高速拾取工作站应用仿真上一篇 | 机器人输送带上料虚拟仿真操作方法


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)