【推荐学习篇】新一代生成式(AGI)机器人物理引擎Genesis初体验
1.强力推荐!!
目前在机器人具身智能实现领域,存在众多实现机器人仿真的物理引擎软件,网上大概总结以下:

本人机器人方向学习,接触过上面的3个左右,例如CoppeliaSim、MuJoCo和 NVIDIA Isaac Sim,本人感觉对机器人智能学习体验足够,各有优缺点,五味杂陈,后面具体后面再花时间给大家一起分享这三个软件的学习过程!!!简单说就是:
(1)CoppeliaSim跨平台很方便,适合运动学层面的机器人仿真(所有关乎机器人运动学层面的算法实现),该环境传感器配置、可视化曲线非常方便(听说其他软件,仅仅机器人末端加一个力传感器就要搞你几天,学习体验和时间成本还是很重要滴!!!!多出来这个时间,干点啥不好),缺点是动力学运算差!!!!!亲身体会!!
(2)MuJoCo适合在linux下运行,新手上手非常不友好,教学文档特别少,一般都是从入门到放弃!!但是动力学运算很准,渲染界面漂亮,还是很值得学会的!!!!后面我也会给大家分享学习过程,助力小白不会放弃!!!!
(3)NVIDIA Isaac Sim、NVIDIA Isaac gym(不更新了,但是可以学习思路)只适合在linux下运行,新手上手比Mujoco快,但是对电脑显卡配置较高,立志搞机器人强化学习的推荐!!!
!!!!重点来了,为什么第一个强力推荐Genesis,首先科普一下:这个物理引擎上周刚发布,两个小时前,官方那个代码还在更新东西,是的,就是那么和我们那么近!!而且全开源!!!
看一下介绍:
Genesis 的核心是全新设计的物理引擎,整合了多个物理求解器到统一框架中。在此基础上,我们添加了生成代理系统,用于自动化数据生成,特别适合机器人等领域的应用。 目前开源的是基础物理引擎和仿真平台,生成框架即将发布。
Genesis 的发展目标:
-
让物理仿真更简单:让所有人都能进行机器人研究(查看我们的承诺)
-
统一各类物理求解器:用最新技术实现高度真实的物理世界模拟
-
自动化数据生成:减少人工数据收集工作,实现数据自动化
相比其他模拟平台,Genesis有这些关键特点:
🐍 Python开发,代码完全开源透明,易于理解和贡献
👶 安装简单,API设计简洁友好
🚀 超快并行模拟:Genesis是最快的物理引擎,比现有GPU加速模拟器(如Isaac Gym/Sim/Lab、Mujoco MJX)快10~80倍,同时保持高精度高保真
💥 一体化框架,支持多种先进物理求解器,可模拟各类材料和物理现象
📸 支持高性能的照片级光线追踪渲染
📐 可微分设计:完全支持可微分模拟。目前MPM求解器和工具求解器已实现可微分,其他求解器(从刚体模拟开始)即将推出
☝🏻 支持物理精确且可微分的触觉传感
🌌 原生支持***生成模拟***,用自然语言生成各种模态数据:交互场景、任务、奖励、资产、动作、策略、轨迹、相机运动、物理精确视频等
关键是:
(1)现有的仿真器存在两大问题:不好用和不透明。目前的GPU仿真器学习起来特别难——对新手来说特别头疼。而且,有些仿真器还是闭源的,这就让研究人员没法根据实际需求去改进底层的物理引擎。Genesis开发时特别注重容易上手,小白入门很快。
(2)5G迅速发展,大模型、chatgpt逐渐成为大家的便利代码助手,计算机学科的研究者如火如荼的搞着大模型,但是对具身部分不了解,机械学科研究者对具身部分很熟悉,但是对智能部分实现比较吃力。计算机图形学有很多厉害的算法可以用在仿真和渲染上,但目前还没人把这些技术整合起来,做出一个既真实又强大的虚拟环境。Genesis物理引擎是计算机和机器人领域的开发者一起合作创造的一个既高效又真实的虚拟世界,服务于机器人研究的新一代生成式(AGI)机器人物理引擎。作者也认为未来生成式(AGI)机器人物理引擎会成为大众欢迎的主流机器人仿真引擎。
2. Genesis初体验!
下面先开始体验起来,官方的github代码仓库如下:
https://github.com/Genesis-Embodied-AI/Genesis
2.1 首先下载到本地,然后用anaconda创建一个虚拟环境
$ conda create -n DL python=3.9 -y (注意python环境一定大于3.9)
2.2 激活虚拟环境
$ conda activate DL
2.3 根据官方文档安装 PyTorch
详细参考本人前面【保姆级教程】深度学习基本环境配置:Ubuntu 上安装Pytorch及TensorFlow(gpu加速版本),对应安装PyTorch gpu加速版即可,否则只能用cpu跑后面的例子!!!!
连接:https://blog.csdn.net/Zqh___/article/details/144792071
2.4 用 pip 安装 Genesis:
$ sudo pip3 install genesis-world
2.4 初级体验
进入下载好的官方github代码仓库的/Genesis-main/examples/tutorials 目录下,运行
$sudo python3 control_your_robot.py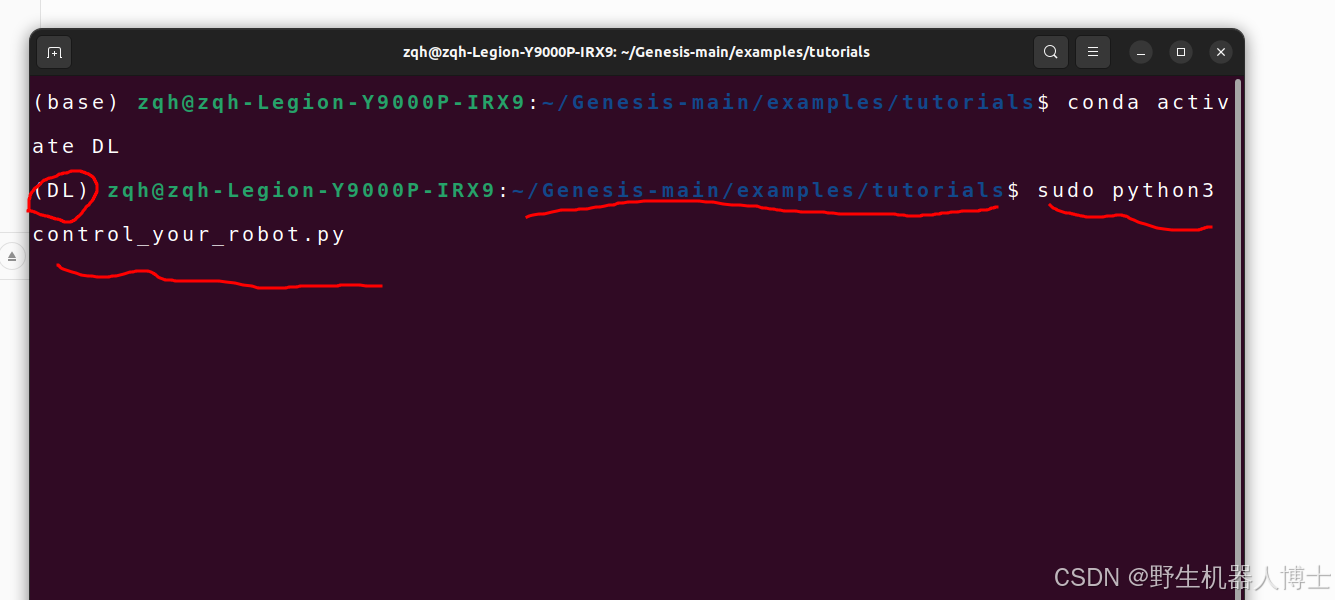
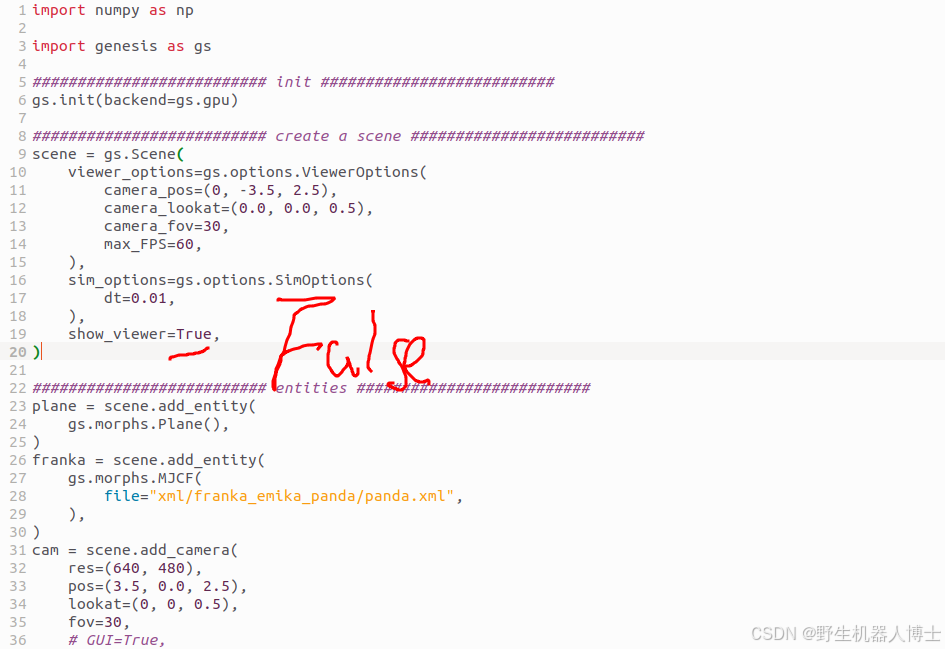
一般到这就没问题了,本人遇到了一个bug:不能初始化OpenGL 3+,就是说显示界面遇到了问题,在github问题讨论区,有人遇到了类似的问题,就是把代码中的可视化选项关闭,但是没有根本解决问题。
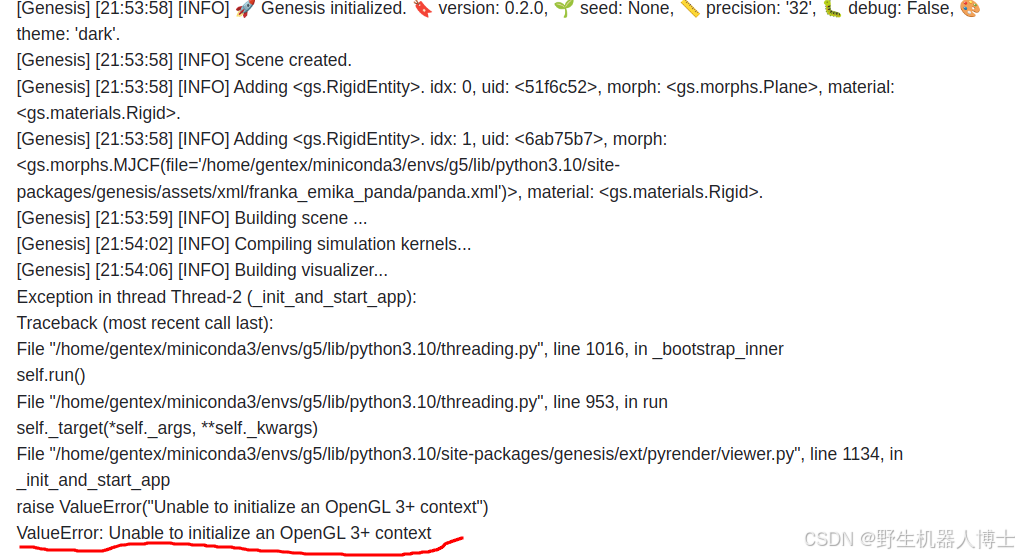
经过一些探索,最终解决如下,是没有激活英韦达的显卡,默认使用了intel的显卡!!!!
$ sudo prime-select nvidia
$ sudo reboot
帮助别人解决了问题还是灰常开心的!!!给自己加鸡腿!!!!最终自己运行完效果如下: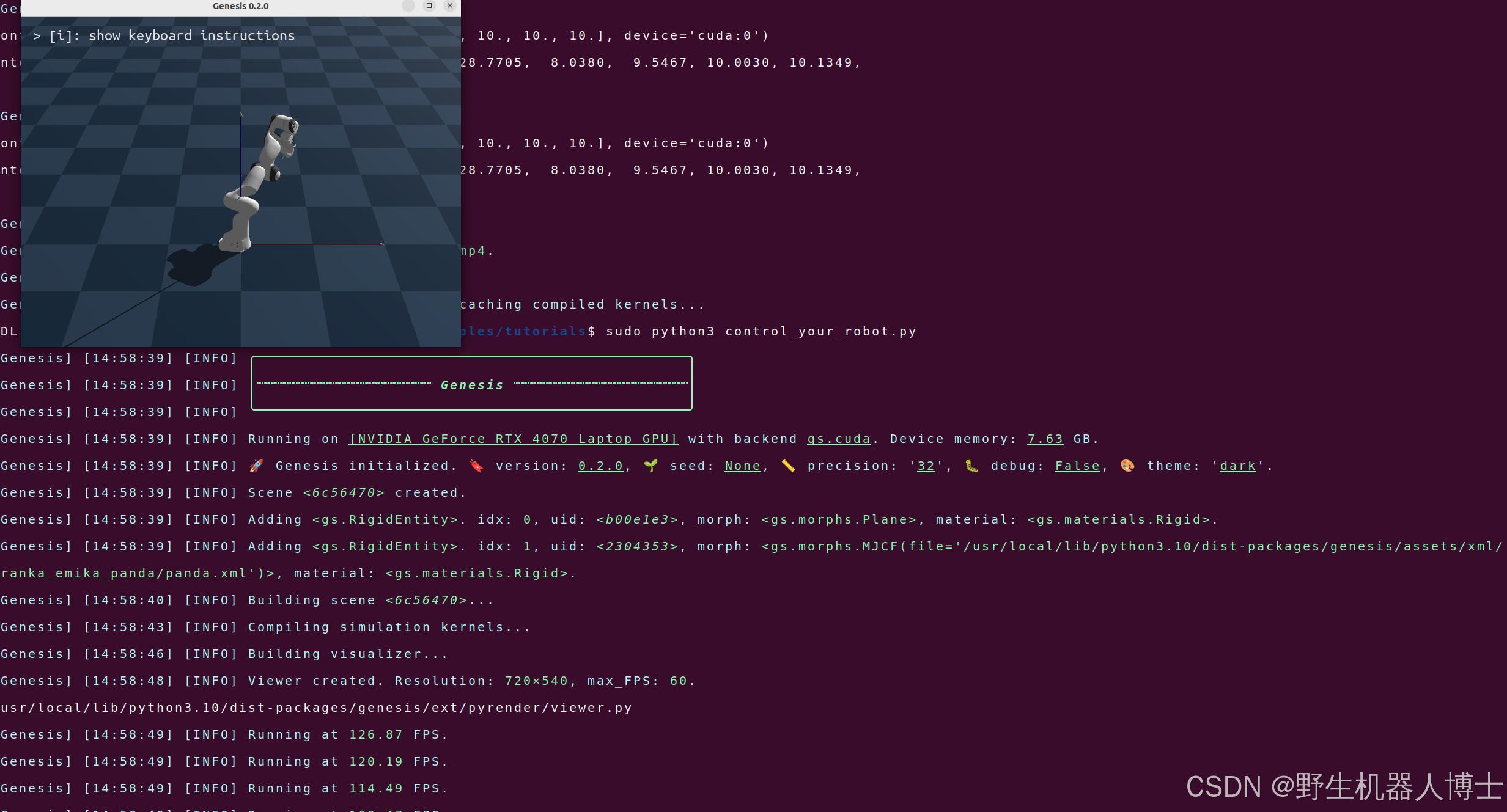
以上内容基础环境配置是进入genesis学习的基础,后面间断分享本软件学习心得!能帮助到大家就是最大的快乐,做人呐,最重要的就是开心喽,有更新的话还会继续补充,希望对大家有所帮助~大家赶紧开启各自的genesis学习吧!!!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 29
29 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)