X Square Robot:以全栈方式构建具身AI与通用机器人
具身人工智能的快速发展正在重塑机器人行业,众多企业竞相研发能够在现实环境中执行多样化任务的机器人,而非局限于单一用途的传统编程模式。
总部位于深圳的X Square Robot(方形机器人)近期备受关注,该公司连续完成四轮融资,最新一轮为C轮投资,当前估值已超过人民币200亿元。公司表示,新一轮融资将加速推进其具身AI基础模型、机器人硬件、数据基础设施及商业化落地的研发进程。
X Square Robot成立于2023年,专注于开发其所定义的通用具身AI。公司的目标并非针对单一任务研发机器人,而是构建能够在家庭、养老机构、工厂和物流中心等广泛物理环境中学习和自适应的AI系统。
公司创始人兼CEO王倩表示:"自创立之初,X Square Robot便坚持自主研发基础模型,走的是一条充满挑战却不可或缺的道路。如今,我们在具身AI模型、可扩展的模型驱动高质量数据管道系统以及真实场景部署方面的投入,已开始产生显著成效。"
公司表示,最新融资将进一步投入具身智能的核心技术和基础研究,推动构建连接物理世界的通用具身AI,最终服务于人类社会。
WALL系列具身AI基础模型
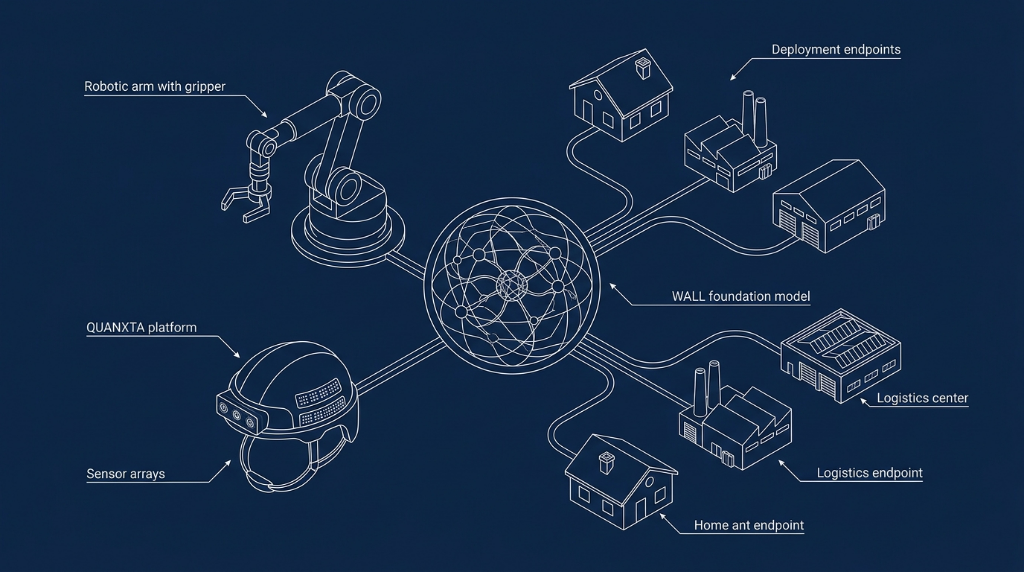
X Square Robot技术战略的核心,是其WALL系列具身AI基础模型。
与通常按照固定动作序列运行的传统工业机器人不同,具身AI模型旨在赋予机器人感知周围环境、理解指令、推理物理空间并完成日益复杂操控任务的能力。
今年4月,公司发布了WALL-B——一款基于World Unified Model(统一世界模型)架构的具身AI基础模型。该架构将感知、语言、动作与物理预测整合于单一网络,而非依赖独立的视觉、语言和动作模块。
公司表示,这一架构有效提升了多模态理解、空间推理和零样本泛化能力,使机器人能够在陌生环境中执行以往未曾见过的任务。
此外,X Square Robot还开源了WALL-OSS-0.5和WALL-WM,进一步拓展了具身AI模型与世界建模方向的研究,并将相关技术贡献给更广泛的机器人社区。
QUANXTA Zero系列:构建数据闭环
为进一步完善具身AI生态,X Square Robot近期推出了QUANXTA Zero系列——一款软硬件一体化平台,旨在提升机器人训练数据的采集、处理和模型开发效率。
公司指出,大语言模型的进步依赖于海量高质量训练数据,但机器人领域面临截然不同的挑战:从物理机器人采集数据难度极大,现有遥操作系统往往成本高昂、部署缓慢、数据质量参差不齐。
QUANXTA Zero系列并非单纯的数据采集设备,而是一套完整的具身AI开发工作流。据介绍,该平台将数据采集、高保真同步、自动清洗、智能标注、模型训练、机器人推理和评估整合于统一的闭环系统,帮助将原始运营数据转化为可用于训练基础模型的高价值资产。
QUANXTA Zero产品系列包含三款针对不同采集场景的设备。旗舰款QUANXTA Zero G1采用轻量化头戴设计与双夹爪配置,可采集运动、操控、视觉、触觉和音频数据;QUANXTA Zero G0支持全身移动数据采集,搭载VR头显、双夹爪及背包系统;QUANXTA Zero E0则是一款紧凑型第一人称采集设备,配备六个摄像头,用于捕获机器人运行时的环境信息。
公司表示,QUANXTA Zero G1集成了自动下游标注、多视角感知和毫秒级传感器同步功能,采集速度可接近每小时100个示教样本,效率是传统遥操作方式的两倍以上。结合公司自研的数据清洗、标注、质量控制、模型训练和评估流水线,该平台形成了持续推动具身AI基础模型迭代的反馈闭环。
全栈硬件布局
X Square Robot并非仅聚焦于AI软件,而是采取了其所称的具身智能"全栈"发展路径。
在基础模型之外,公司还自主研发了一系列机器人硬件产品,包括:通用轮式双臂机器人及具身智能研究平台QUANTA X1 Pro、下一代通用轮式仿人机器人QUANTA X2、灵巧机器手Artixon,以及六轴机械臂。公司表示,上述硬件平台均针对大型具身AI模型进行了专项适配设计。
在真实训练数据方面,X Square Robot也进行了大规模投入。据介绍,公司建立了国内较早的大规模具身AI数据采集基地之一,并开发了多套专有的机器人交互数据采集系统,涵盖VR遥操作、移动机器人平台和灵巧手数据采集设备。公司通过整合互联网数据、仿真环境和真实机器人运行数据,为模型训练和持续优化提供支撑。
这一体系形成了正向循环:部署机器人所采集的数据不断改进基础模型,而更新后的模型又使机器人在真实环境中能够胜任更复杂的任务。
家庭场景落地探索
在X Square Robot的战略布局中,将机器人部署于真实运营环境是一项核心主题。
公司认为,家庭场景是具身AI面临挑战最大的环境之一,因为机器人必须应对不断变化的空间布局、各类物品以及持续的人机交互。
为此,X Square Robot与58同城合作,在深圳和北京推出了AI家政保洁服务,机器人与人工保洁员协同作业,在住宅环境中共同开展清洁工作。公司还推出了"X家庭成员计划",让机器人在家庭中长期居住,执行日常家务并采集运营数据。
公司将这些落地实践视为改进基础模型的重要反馈来源,同时也是展示具身AI突破受控演示阶段、走入日常生活的重要路径。
多行业商业化拓展
尽管家庭场景是重要的长期方向,X Square Robot已在多个商业领域积极推进技术应用。
在养老领域,公司与一家养老服务提供商达成战略合作,部署具身机器人承担物品配送、清洁整理、与老人沟通交流,以及巡逻检查和预警监测等工作。此次合作旨在提升运营效率,同时使护理人员能够将更多精力投入到更具价值的工作中。
在制造领域,X Square Robot与金杯汽车合作,将具身AI机器人引入需要精准重复操作的汽车生产环境,双方结合机器人平台与金杯汽车的制造经验,推动机器人在汽车产线上的落地。
在物流领域,公司与国内一家头部物流企业合作,将具身AI机器人引入快递分拣和投送环节,为动态仓储环境提供更灵活的自动化方案,同时提升效率和运营一致性。
上述部署体现了公司将同一套具身AI基础模型跨行业复用的战略雄心,而非为不同应用场景分别开发独立的AI系统。
展望未来,X Square Robot表示,具身AI的持续进步将有赖于模型、机器人硬件、数据基础设施与真实部署的深度整合。
正如王倩所言:"随着AI从数字世界走向物理世界,进步将取决于模型、数据与机器人的紧密协同。我们正在打造这一基础,让具身AI真正融入日常生活。"
Q&A
Q1:X Square Robot的WALL-B模型有什么独特之处?
A:WALL-B是基于World Unified Model(统一世界模型)架构构建的具身AI基础模型,其核心特点是将感知、语言、动作与物理预测整合在单一网络中,不再依赖独立的视觉、语言和动作模块。这种设计显著提升了机器人的多模态理解、空间推理和零样本泛化能力,使机器人能在陌生环境中执行从未见过的任务,突破了传统工业机器人只能重复固定动作的局限。
Q2:QUANXTA Zero系列平台解决了机器人数据采集中的哪些痛点?
A:传统机器人遥操作系统存在成本高、部署慢、数据质量不稳定等问题。QUANXTA Zero系列将数据采集、同步、清洗、标注、模型训练、推理和评估整合为一套闭环工作流。以旗舰款G1为例,其采集速度可达每小时近100个示教样本,效率超过传统方式两倍,同时支持毫秒级传感器同步和多视角感知,大幅提升了训练数据的质量与效率。
Q3:X Square Robot目前在哪些行业实现了机器人商业化落地?
A:X Square Robot目前已在家政、养老、汽车制造和物流四个领域推进商业化部署。在家政方面,与58同城合作在深圳、北京开展AI保洁服务;在养老方面,与养老机构合作部署执行配送、清洁和巡检任务的机器人;在制造方面,与金杯汽车合作将机器人引入汽车产线;在物流方面,与国内头部物流企业合作推进分拣自动化。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 1
1 0
0- 0



 已为社区贡献38条内容
已为社区贡献38条内容

所有评论(0)