3.CAN总线协议
1. 概述
CAN = Controller Area Network,控制器局域网
一种串行通信总线,主打:多设备组网、抗干扰、高可靠、实时性强,现在汽车、工业自动化、电梯、机器人、新能源设备标配。
下面分:是什么 → 特点 → 接线 → 帧格式 → 速率 → 常见类型 → 日常术语,全程大白话,不堆砌晦涩理论。
一、CAN 到底是干嘛的?(举例子秒懂)
-
生活类比
普通串口(RS232/TTL):一对一打电话,A 只能跟 B 聊,多设备要拉很多线。
CAN 总线:微信群聊
- 一条总线挂几十上百个设备(节点)
- 任何节点发消息,总线上所有节点都能收到
- 设备自己判断:这条消息是不是发给我的,是就处理,不是就忽略
最典型场景:汽车
一辆车里几十上百个 ECU(车载控制器):
发动机、变速箱、ABS、车灯、车窗、空调、仪表盘、雷达、电池管理…
如果每个设备单独拉线,线路杂乱、故障多、干扰大。
用 CAN 总线:只用 2 根线,所有设备并联在总线上通信。
二、CAN 核心 6 大特点(必考 / 面试重点)
-
多主通信(无主机、无从机)
所有节点地位平等,谁都可以主动发数据,不是传统 “主机轮询从机”。
-
优先级仲裁(实时性强)
多个设备同时发消息时,ID 越小优先级越高,高优先级优先占用总线,不会冲突。
例:刹车信号 > 车窗信号,紧急信号优先传递。
-
抗干扰极强(差分信号)
CAN 用 CAN_H、CAN_L 两根双绞线,传输差分电压。
外界电磁干扰会同时影响两根线,差值不变 → 工业 / 车载强干扰环境首选。
-
错误检测 + 自动重发
内置 CRC 校验、位错误、填充错误检测。
出错节点会自动重发;严重故障节点会自动脱离总线,不拖垮整个网络。
-
布线简单、扩展方便
两根线串联 / 并联,想加新设备直接挂到总线上即可。
-
传输距离 & 速率反比
速率越高,传得越近;距离越远,速率必须降。
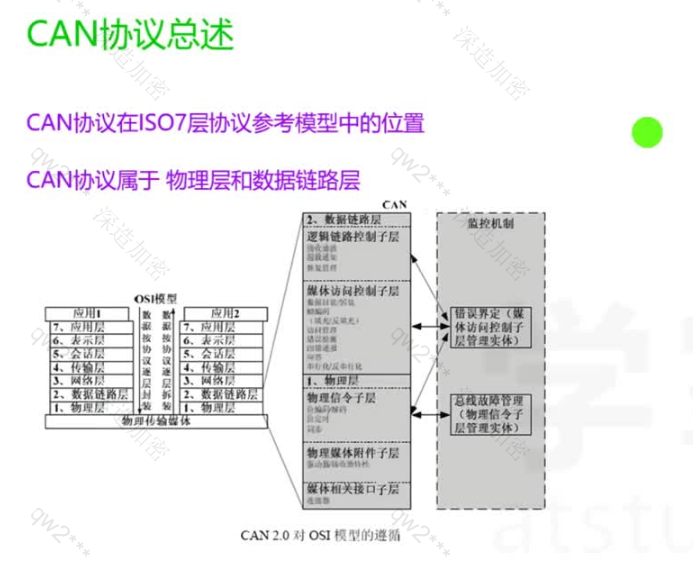
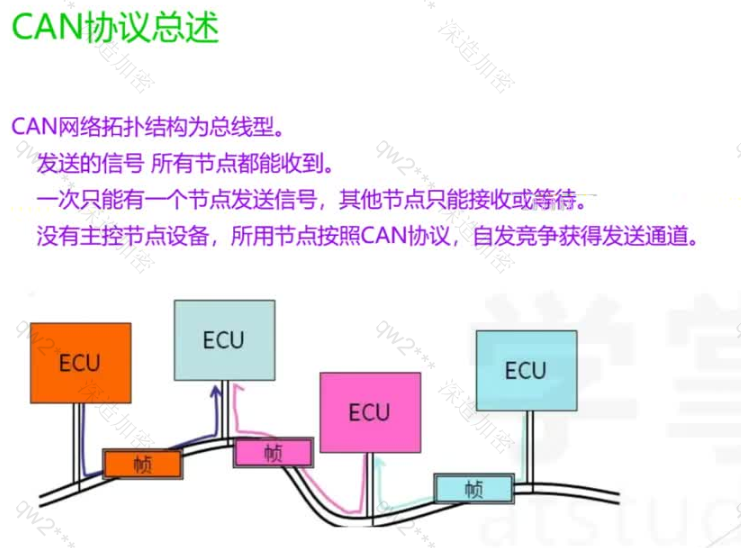
2.CAN协议总述


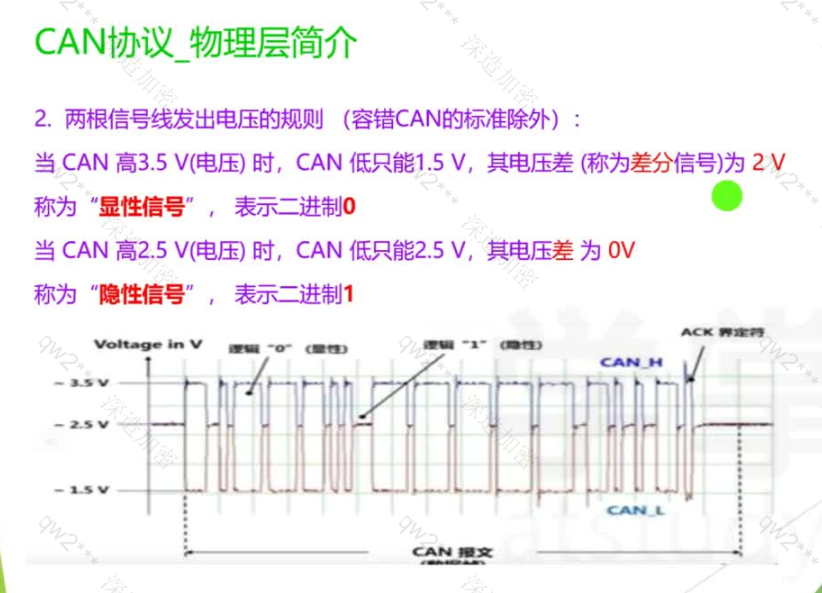
3.CAN协议-物理层简介


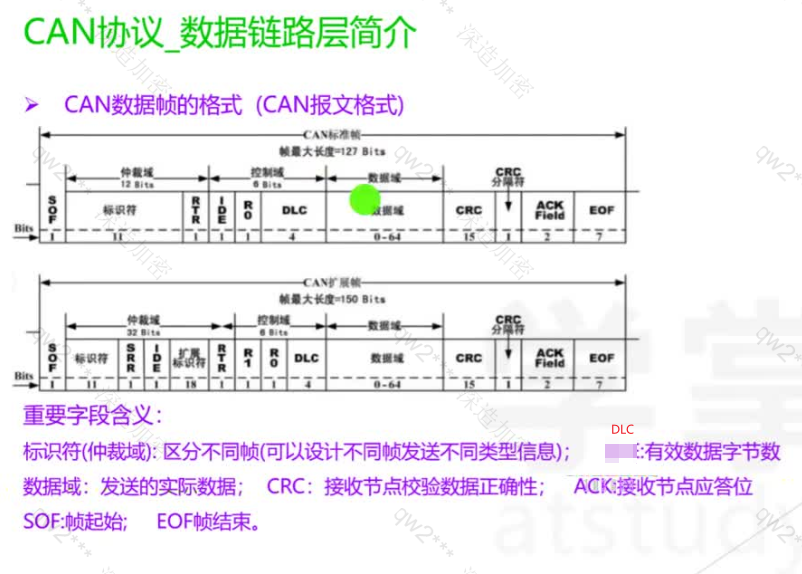
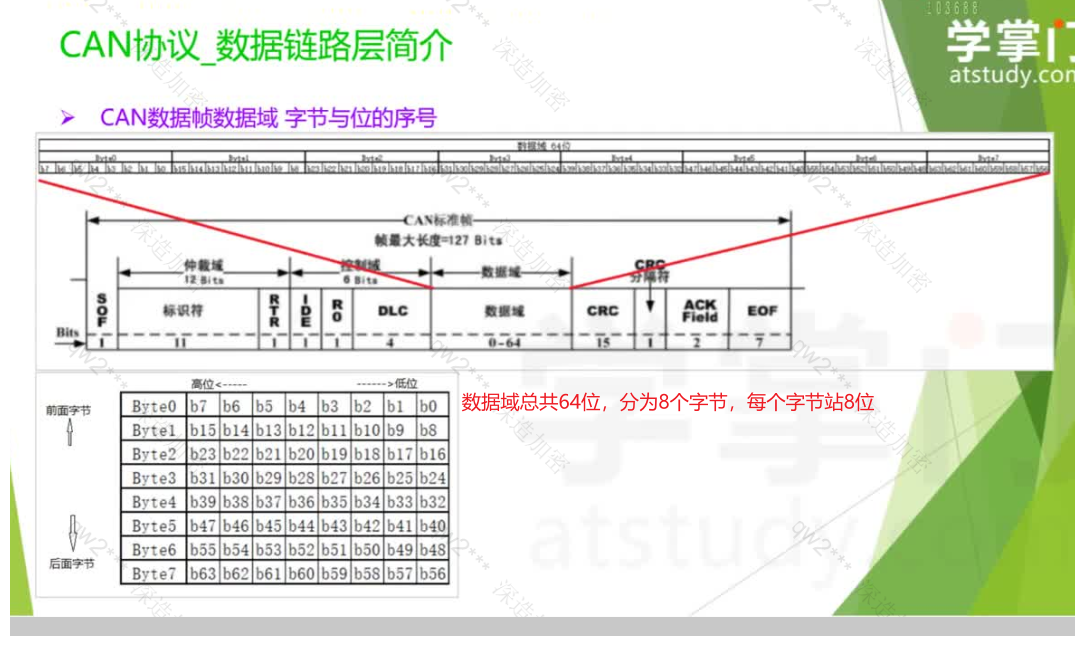
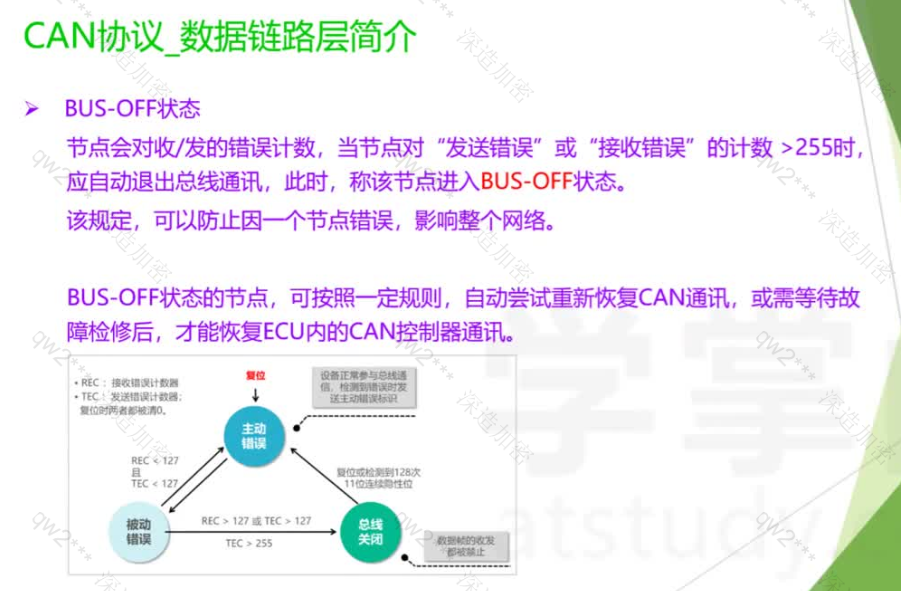
4.CAN协议-数据链路层简介

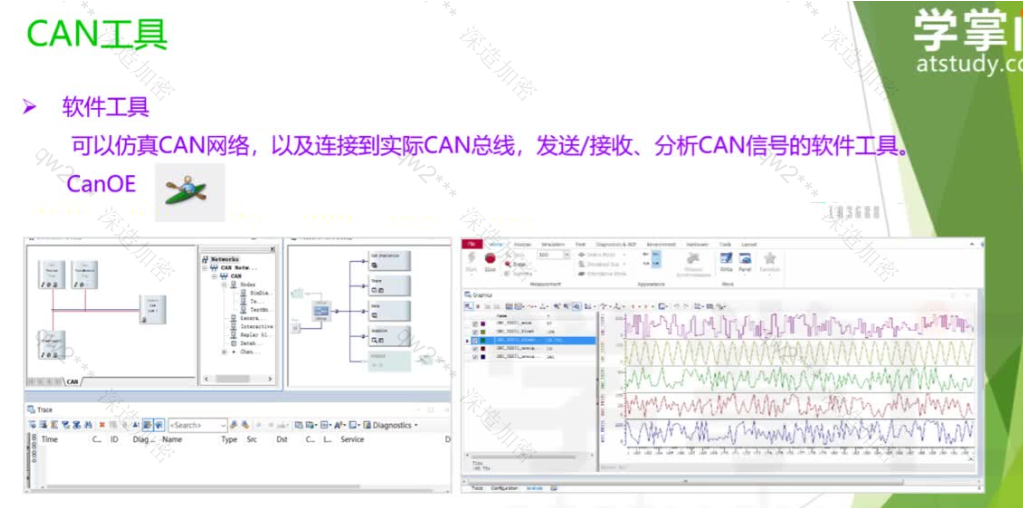
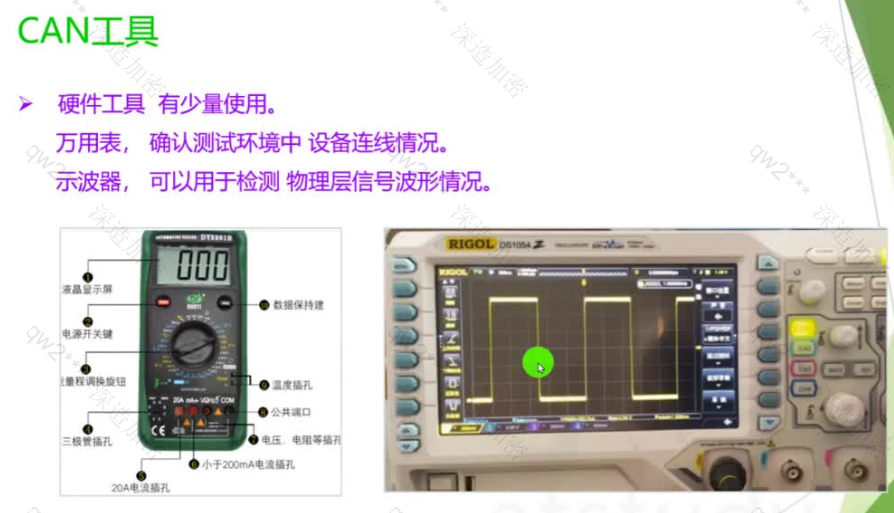
5.CAN工具



6. 企业CAN信号设计


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)