面向柔性制造的具身智能综述
摘要
在DeepSeek、GPT4等新一代大模型取得突破性进展的驱动下,具身智能作为人工智能与机器人交叉的核心分支,正快速向工业制造场景落地渗透。
具身智能核心特征是智能体依托物理本体与环境实时交互生成智能行为,无需大规模显式符号推理,在家庭服务、自主导航、户外巡检救援等开放场景已完成大量验证。
工业场景具备半结构化环境、工况相对稳定、工艺流程标准化等特征,是具身智能最易规模化商用的赛道。
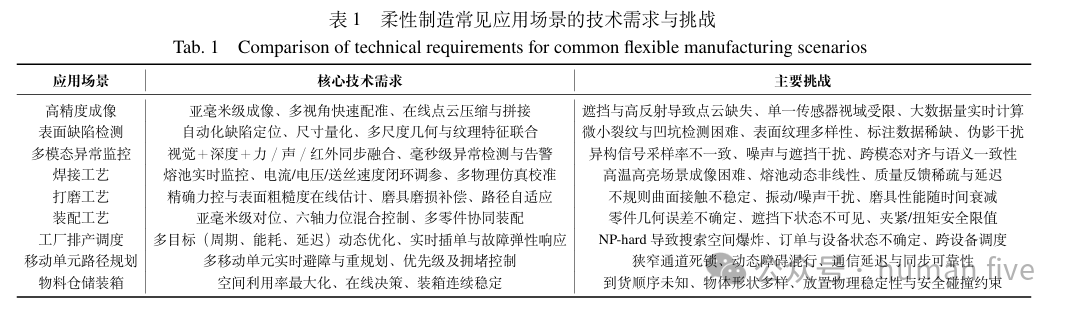
但当下制造业全面转向多品种、小批量、定制化柔性离散生产,混线生产、产品快速迭代、非标工艺常态化带来三大工业具身智能核心难题:
1)受限感知下的工艺精准建模与在线监测:车间遮挡、强光、电弧、传感器观测范围局限导致环境与工件信息不完备,难以建立高精度几何、动力学工艺模型,无法实现缺陷、内部物理状态实时检测;
2)柔性适配与高精操控的动态平衡:低成本通用产线需要兼容多类工件,但机械硬件精度不足,难以达到航空、3C、新能源行业±0.05mm级加工装配公差,柔性兼容与加工精度存在固有冲突;
3)通用运动技能与行业专用工艺协同融合:机器人基础抓取、轨迹跟踪等通用操作无法直接适配焊接、打磨、螺栓紧固等带复杂热、力学约束的专属工艺,通用动作与工艺参数难以一体化联合优化。
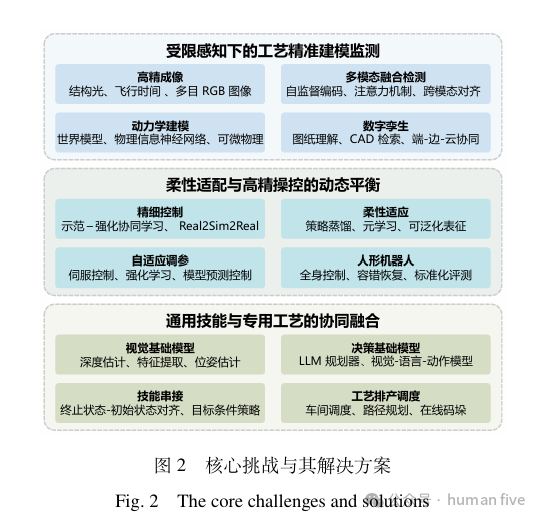
针对三大核心挑战,本文构建工业之眼(感知层)、工业之手(控制执行层)、工业之脑(全局决策层)三层完整技术框架,系统梳理国内外前沿研究成果:感知层围绕3维高精成像、多模态异构数据融合、工业视觉基础模型展开综述;控制层针对低精度硬件误差补偿、可变产线通用柔性操控、工艺参数自适应调节三大技术路线展开剖析;决策层聚焦车间智能调度、数字孪生虚实同步、物理驱动世界模型三大方向展开归纳。

从多层级技术耦合、多学科交叉融合视角,完整揭示制造系统“感知-决策-执行”闭环优化的具身智能技术链路,创新性提出面向柔性制造的认知增强—技能跃迁—系统进化三阶段演进模型,结合汽车、船舶、航空、3C等典型工业场景案例验证各技术落地效果。文末梳理当前研究现存短板,预判工业具身智能未来发展方向,旨在为柔性离散制造领域具身智能跨学科理论研究与工程落地提供完整理论框架与实践指导。
0 引言
新一代通用人工智能模型实现视觉、语言、逻辑推理能力跨越式提升,具身智能作为落地实体制造业的关键技术路径受到学术界与工业界广泛关注。传统通用具身智能研究多面向家庭、户外无约束开放环境,环境边界模糊、任务随机;而工业制造属于半结构化受限场景,生产目标明确、工序流程具备固定约束,理论上更容易落地,但柔性化转型带来全新技术痛点。
当前国内外已有大量具身智能相关综述,通用具身综述侧重人形、家用机器人;工业大模型综述侧重顶层排产,缺少底层感知与机器人执行的完整链路梳理;机器人控制综述缺少多模态感知、大模型、数字孪生融合视角,尚未有文献针对柔性离散制造场景形成“感知-控制-决策”一体化完整综述,存在明显研究空白。
本文限定研究范围为离散制造(机加工、装配、质检、车间物流、机器人打磨焊接等工序),化工、冶金、连续流程制造不在本文讨论范畴。开篇首先阐释柔性制造三大核心矛盾,随后分三层系统梳理现有技术,新增人形机器人独立章节,最后提出行业演进模型、现存六大瓶颈与未来研究路线。
0.1 柔性制造三大核心挑战详解
挑战1:受限感知下的工艺精准建模与在线监测
工业感知系统存在多重观测约束:1)物理遮挡,工装夹具、工件堆叠、焊枪结构遮挡目标区域,单相机无法获取完整工件几何;2)环境干扰,焊接弧光、金属高反光、车间粉尘、高温会大幅降低成像质量;3)传感器固有局限,力、红外、声学传感器仅能获取局部一维/二维信息,无法还原完整三维动力学场。
典型痛点:螺栓拧紧过程无法直接观测内部摩擦、应力分布;焊接熔池内部温度梯度、金属相变无法通过表面红外完整采集;大型航空涡轮叶片局部被工装遮挡,三坐标、普通视觉无法完成全域扫描。有限观测数据下难以建立精准工艺数字模型,缺陷识别、过程监测存在滞后与误差,直接制约机器人自主决策与闭环控制。
挑战2:柔性适配与高精操控的动态平衡
传统专用产线设备定制化程度高,可稳定实现±0.03~±0.05mm加工公差,但仅适配单一产品,换产重构成本极高;柔性产线采用通用机器人、低成本工装夹具,设备机械间隙、定位误差大,原生精度不足。同时柔性生产需要频繁切换工件型号、调整工位布局,负载、动力学参数持续变化,固定控制参数无法兼容所有工况。若单纯追求精度,产线柔性丧失;若优先兼容多品种,加工装配质量难以达标,二者形成动态平衡难题。典型场景:新能源汽车总装线多车型混流,车门、底盘零部件尺寸差异大,通用机器人难以统一满足装配间隙标准。
挑战3:通用技能与专用工艺协同融合
机器人通用技能指抓取、移动、轨迹跟踪、力控基础操作;专用工艺包含焊接熔池调控、打磨材料去除、螺栓扭矩控制、航空精密装配等专属物理约束。现有算法大多分离训练运动控制与工艺调节模块,无法实现端到端联合优化。例如机器人打磨仅规划运动轨迹,不能根据实时粗糙度、磨具磨损动态调整接触压力;焊接机器人仅固定焊枪速度,无法依据熔池形貌实时修正电流、送丝速度。通用动作与行业工艺割裂,导致柔性产线工艺一致性差,难以替代熟练技工。
0.2 现有综述的不足
-
通用具身智能综述(人形、服务机器人方向):面向开放无约束环境,未考虑工业车间遮挡、高温、高精度公差、工艺物理约束等专属限制,无法适配制造场景需求;
-
工业基础模型综述:聚焦工厂调度、管理类大模型,缺少机器人视觉、力感知、底层运动操控完整技术链条梳理;
-
机器人控制单一综述:仅讨论运动算法,未融合3D视觉、多模态融合、视觉语言大模型、数字孪生等新一代感知决策技术;
-
细分工艺综述(焊接/打磨):仅针对单一工序,缺乏跨工序、全厂级系统框架,无法形成统一技术演进逻辑。
1 工业之眼(感知层)
工业之眼是广义多模态感知系统,不局限于光学视觉,集成RGB相机、3D深度传感器、六轴力扭矩传感器、声学采集设备、红外热像仪等多元传感单元,核心目标是解决受限观测条件下工件几何重建、工艺状态实时表征,为机器人操控、车间全局决策提供精准输入。本章分3维高精成像、多模态数据融合、工业视觉基础模型三个模块展开详细论述。
1.1 3维视觉高精成像
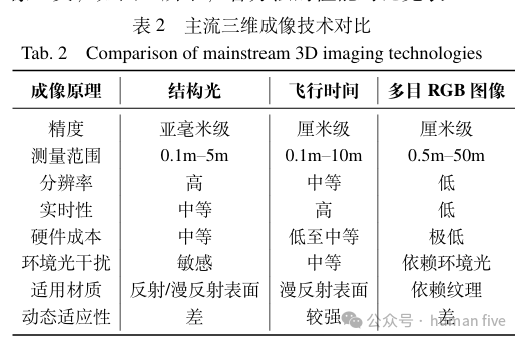
二维RGB图像仅能获取纹理色彩,缺失空间深度信息,易受光照、反光、纹理缺失干扰,无法完成微米级尺寸测量、缺陷量化。3维视觉通过主动/被动传感重建工件完整三维几何,是柔性制造感知核心技术,主流成像方案分为结构光、飞行时间(TOF)、多目RGB运动恢复结构三类,下文分原理、技术分支、工业应用、对比表格完整阐述。
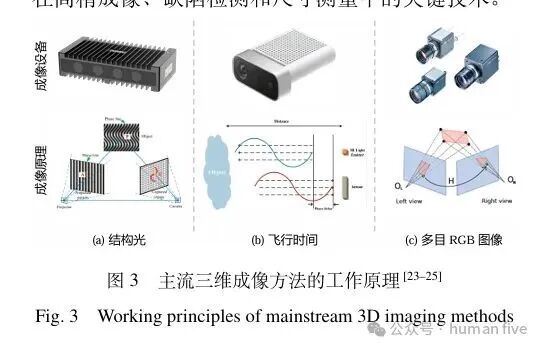
1.1.1 三类3D成像原理与细分技术
(1)结构光成像
核心原理:向工件投射编码光栅/点阵,利用光学三角测量捕捉工件表面形变带来的光信号偏移,解算每一点三维坐标,无需依赖工件表面纹理,测量精度可达亚毫米级。细分主流技术:
1)傅里叶变换轮廓术(FTP):Taked等人1983年提出,通过单帧条纹傅里叶变换重建曲面,计算速度快,但存在相位包裹误差,静态简单工件适用;
2)多频相移法(PSP):采用高低频光栅组合,低频完成相位解包裹、高频提升重建精度,大幅提升复杂曲面测量稳定性,是工业主流静态扫描方案;
3)De Bruijn单帧编码结构光:单帧投射多组无重复编码图案,无需多帧拍摄,适配运动工件在线扫描;
4)相位偏折术(PMD):针对金属、车漆等高反光曲面,不直接采集工件反射条纹,捕捉镜面相位梯度,完美解决高光空洞、噪声问题;
5)线扫激光结构光:线性光源逐行扫描工件,搭配线阵相机连续采集,适合PCB、金属管材、长条型材连续在线检测。
适用工业场景:航空涡轮叶片、汽车整车漆面、高精度齿轮、大型模具微米级缺陷与尺寸检测。
(2)飞行时间TOF成像
分为激光雷达、RGB-D面阵TOF相机两类:
1)旋转激光雷达:发射红外激光束,通过光束往返时间计算测距,测量范围可达10m以上,强光、粉尘环境鲁棒性强;缺点为稀疏点云、精度仅厘米级,设备成本偏高;
2)面阵RGB-D TOF相机:同步输出整张深度图,实时性优异,硬件紧凑易搭载机器人末端;配套经典重建算法:KinectFusion基于TSDF截断符号距离场完成稠密场景融合;ROSEFusion采用粒子滤波优化高速运动下重建精度;MIPS-Fusion支持大规模车间场景分块在线重建。
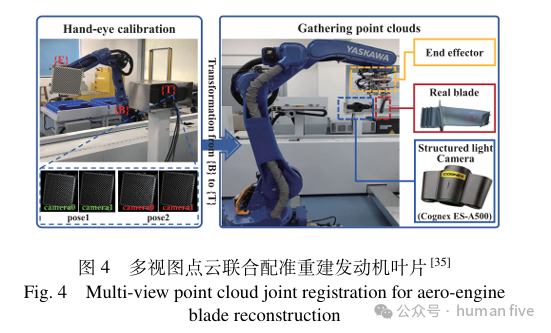
多视图场景下需完成点云配准,经典ICP迭代最近点算法,改进方案Geometric Transformer、变参数图优化配准,解决低重叠工件点云对齐难题,典型应用航空发动机叶片多视角扫描重建。
(3)多目RGB被动三维重建(SfM+MVS)
无主动光源,依靠多视角彩色图像特征匹配,三角化求解三维空间坐标。完整流程:
1)运动恢复结构SfM:提取SIFT、ORB图像特征,匹配多视图对应点,求解相机位姿,生成稀疏点云;开源工具COLMAP、AliceVision;
2)多视图立体匹配MVS:基于相机内外参与稀疏点云,生成稠密三维点云,代表网络MVSNet;
前沿隐式重建路线:NeRF、3D高斯溅射(GS)擅长离线高质量渲染,但实时性不足,工业在线检测落地较少;DUSt3R、VGGT突破传统SfM流程,仅输入多张图像直接输出点云与相机参数,无需复杂标定,适配汽车底盘、钢结构弱纹理工件在线重建。
1.1.2 3维视觉下游两大工业任务:缺陷检测、尺寸测量
1)缺陷检测:3D点云可量化缺陷深度、体积、面积,彻底规避2D视觉纹理、光照干扰;经典算法:点云密度聚类分割、熵驱动邻域拟合、Fusion-ICP配准对比;可识别磁性瓦亚毫米裂纹、管道内壁缺陷、齿轮微米崩缺; 2)非接触尺寸测量:替代三坐标接触式测量,无工件刮擦风险,支持大型风机叶片、船舶构件全覆盖扫描;多视角相移系统可实现±0.2mm自由曲面测量精度,双线扫设备连续扫描误差低于0.05mm。
案例研究1 汽车漆面3维缺陷检测
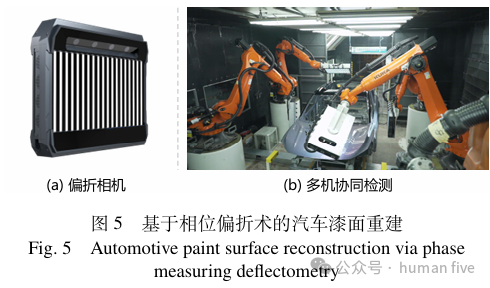
传统人工漆面检测漏检率超30%,2D视觉受高反光干扰无法识别0.05~0.3mm橘皮、尘粒缺陷。本文采用相位偏折PMD多机器人多相机协同扫描方案,整车无盲区全覆盖;点云与标准车身模型精准配准,自动分割缺陷区域,系统漏检率低于1%,误检率小于3%,可直接给打磨工序输出缺陷坐标、深度参数,实现全自动漆面修复。
案例研究2 船舶焊接立体感知
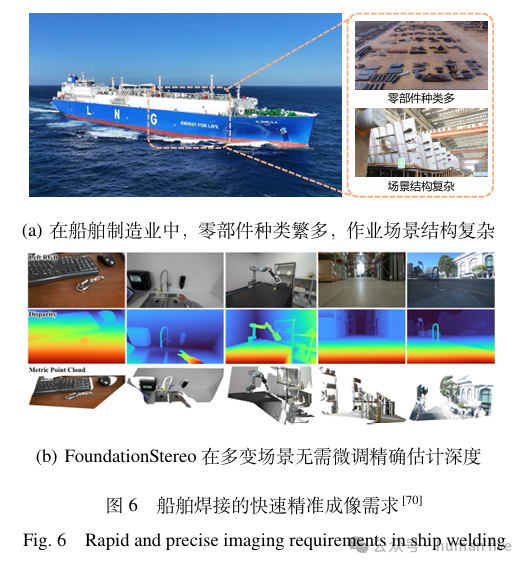
船舶工件尺寸巨大、焊缝非标、场景非结构化,传统立体匹配泛化性极差。FoundationStereo模型基于百万级船舶合成图像自监督预训练,无需现场微调即可完成焊缝深度重建,精度±0.2mm,实时输出坡口宽度、焊缝位置,支撑焊枪自主轨迹规划。
1.2 多源数据融合感知
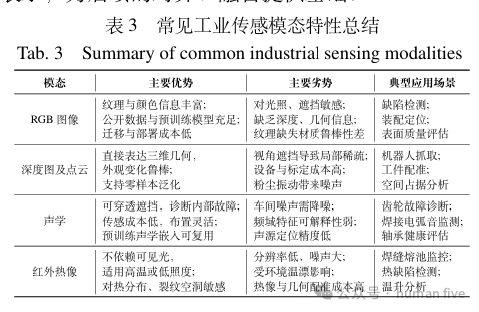
单一传感模态存在固有感知盲区:视觉受弧光、遮挡失效;声学车间信噪比极低;红外仅采集表面温度,无法获取内部状态。多模态融合通过视觉、深度、力、声学、红外信息互补,提升复杂工况感知鲁棒性,完整流程分为异构特征提取、跨模态对齐、三层特征融合。
1.2.1 多模态异构特征提取
不同传感器输出数据格式差异极大:图像为二维矩阵、点云无序三维向量、力/电流/音频为一维时序、红外灰度图,需采用专属骨干网络提取统一特征:
1)RGB/红外图像:浅层ResNet,深层ViT;自监督预训练MAE、InfMAE;
2)三维点云:PointNet、PointNet++、Point Transformer;预训练PointMAE、PTv3;
3)一维时序(力、电压、声学):1D-CNN、TCN、GRU;音频预训练PANNs、YAMNet;
大规模通用预训练模型可直接迁移至工业场景,大幅减少工件标注成本,适配柔性产线快速换产需求。
1.2.2 跨模态语义对齐
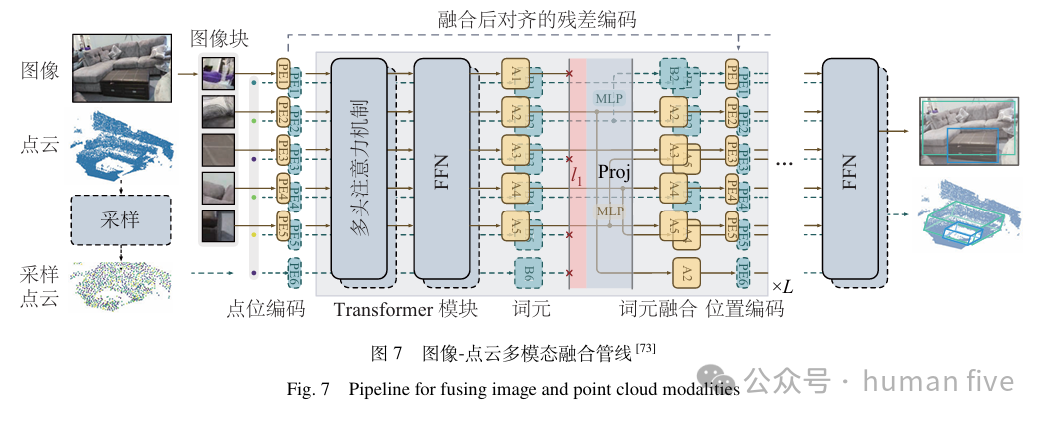
不同模态维度、时序、语义空间完全异构,需映射至统一共享表征空间,主流对齐方案: 1)对比学习(CLIP、AA-CLIP):图像、文本、传感特征正负样本对比训练,实现零样本工业缺陷识别; 2)跨模态注意力架构(MulT、MetaTransformer):词元级建模图像、时序、点云对应关系,无需严格时序同步; 3)联合嵌入框架(深度典型相关DCCA、变分自编码器):学习共享隐变量,消除模态尺度差异。
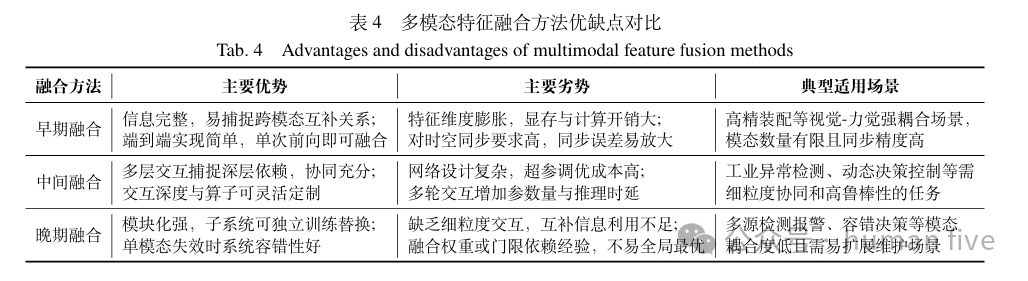
1.2.3 三层特征融合机制优缺点对比
案例1 视觉-力多模态精密装配
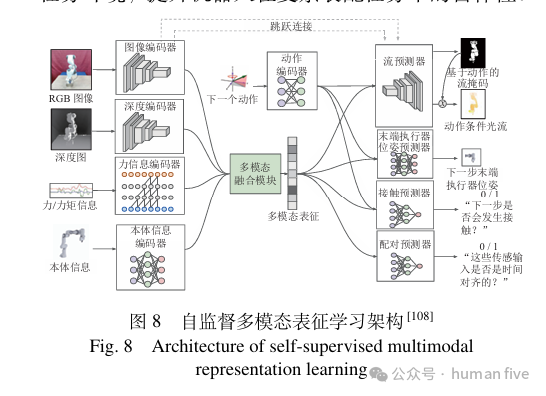
斯坦福研究团队搭建RGB-D视觉+六轴力扭矩+本体时序多模态表征框架,采用变分自编码器完成模态联合建模,新增光流、接触事件自监督辅助任务;系统可识别0.1~0.5mm微小装配间隙,应对零件遮挡、位置偏移,异形插销装配鲁棒性大幅提升,无需大量工件标注。
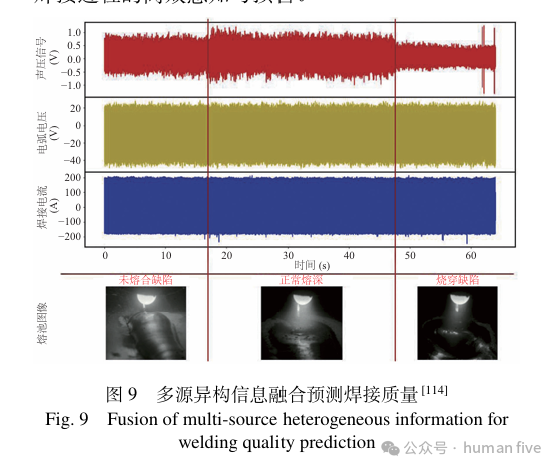
案例2 弧焊多模态质量实时预测
融合熔池视觉、电弧声学、焊接电流电压三类异构数据:CNN提取熔池轮廓特征,时序网络提取电声时域统计量,LSTM建模时序关联;系统可提前0~2秒预判未熔合、烧穿缺陷,实时输出工艺调整参数,给焊接控制器闭环反馈。
1.3 工业视觉基础模型
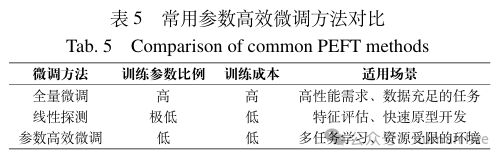
传统工业视觉模型针对单一工件定制训练,换产需重新采集海量标注数据,柔性产线部署效率极低。视觉基础模型依托互联网、工业海量无标注数据完成预训练,具备零/少样本跨工件、跨工艺迁移能力,分为2D视觉基础模型、3D视觉基础模型、参数高效微调三部分。
1.3.1 二维视觉基础模型
1)SAM、SAM2:通用分割基础模型,支持点、框、文本提示,SAM2支持4K视频30帧实时分割,快速分割工件、缺陷区域;
2)DINOv2:自监督视觉特征提取,无需人工标注,少样本缺陷检测主流骨干;
3)Depth Anything v2:单目通用深度估计,低成本2D相机即可生成稠密深度图;
4)FoundationPose:统一6D物体位姿估计框架,适配全新未知零件抓取。
1.3.2 三维视觉基础模型
3D-MVP、DUSt3R、VGGT、3D-VisTA等,统一三维几何、语义特征,跳过传统SfM重建流程,弱纹理、无标定工业场景快速完成点云重建、零件匹配、位姿预测。
1.3.3 主流微调方案对比
柔性车间边缘工控算力有限,无法支撑全量微调,三类微调路线适配不同生产条件:
案例 AnomalyDINO少样本工业缺陷检测
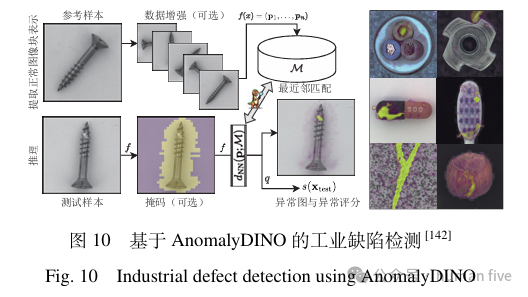
基于DINOv2预训练视觉特征构建缺陷记忆库,随机旋转数据增强提升泛化;依靠SAM零样本分割剔除背景干扰,仅依靠少量良品样本即可完成金属、塑料、复合材料各类工件缺陷识别,完美解决工业缺陷样本长尾稀缺问题,在MVTec公开工业数据集性能领先。
2 工业之手(控制执行层)
工业之手指代机械臂、移动机器人、末端执行器等全系列执行单元,承接工业之眼多模态感知数据完成抓取、装配、焊接、打磨、钻孔等物理交互任务。柔性制造带来低成本硬件普及、产线频繁重构、工艺动态变化三大背景,衍生三大核心研究方向:低精度硬件误差补偿、可变产线通用柔性操控、工艺参数自适应实时调节。
2.1 低精度硬件精准控制
柔性产线为压缩设备投入,大量低成本低精度机械臂、通用工装被广泛使用,机械间隙、定位偏差、传动误差普遍存在,依靠纯硬件升级成本过高;因此依托高精度感知+智能控制算法补偿硬件误差,在低成本设备上实现微米级操作精度成为核心路线。本节从工件6D位姿识别、多类控制框架、虚实迁移Sim2Real三部分展开。
2.1.1 工件6自由度位姿精准识别
位姿是机器人运动规划的前置输入,分为二维图像方案、三维点云方案:
1)2D位姿识别:DOPE、SOCS、A5群等变扩散模型,依靠单目RGB预测物体旋转平移,适合纹理丰富、无遮挡工件;SOCS针对同类零件形变差异,引入语义关键点提升类别泛化;
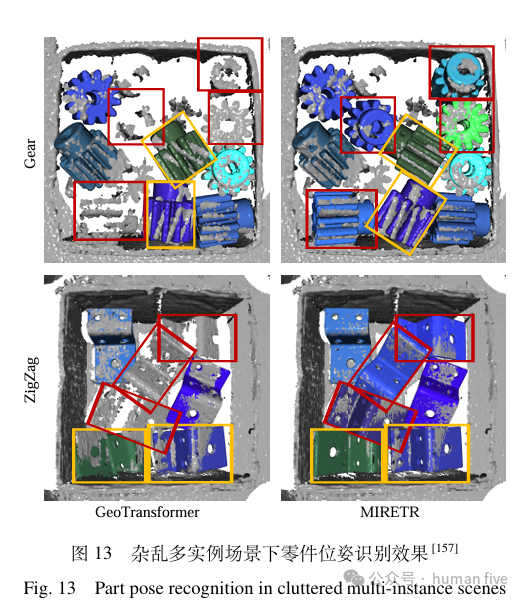
2)3D点云位姿识别:MIRETR、几何Transformer,通过实例掩码隔离杂乱场景多零件,处理料箱堆叠、局部遮挡、无纹理金属件,是工业抓取主流方案。
2.1.2 工业控制算法体系全面对比
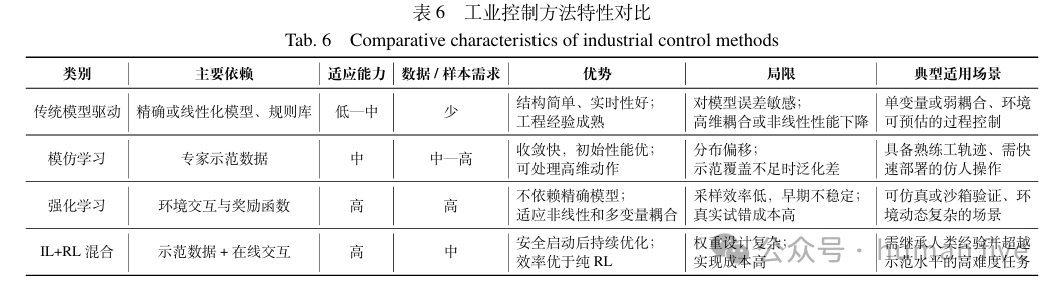
主流混合控制方案:AMP对抗模仿学习、残差策略学习、DDT单次示范跟踪;残差策略以人工示范为基础,强化学习修正硬件、环境带来的轨迹偏差,是当前工业落地最优路线。
2.1.3 Sim2Real与Real2Sim2Real虚实迁移
直接在实体机器人训练策略会占用产线、磨损设备、产生报废工件,因此依托仿真平台预训练再部署实体;核心难点仿真与现实域间隙,两类主流解决方案:
1)域随机化:仿真环境随机修改光照、材质、动力学参数,扩大训练分布,提升真实场景鲁棒性;缺陷过度随机会增大训练难度;
2)Real2Sim2Real闭环:采集真实工件交互数据,修正仿真几何、物理参数,搭配3D高斯溅射、可微渲染缩小视觉鸿沟;主流仿真引擎IsaacGym、MuJoCo、PyBullet;配套框架RoboGSim、PIN-WM。
案例1 数字孪生辅助3C残差装配
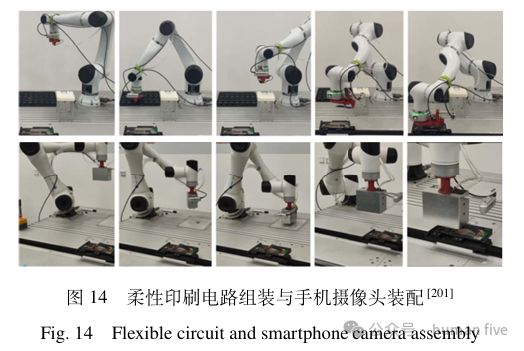
基于VR设备采集人类视觉、力、语音多模态示范数据,在数字孪生仿真环境开展课程式学习,逐步引入零件偏移、光照变化等扰动;采用残差策略补偿机械臂硬件误差,适配手机摄像头微小公差装配,大幅减少人工示范数据需求量。
案例2 ALOHA低成本双臂精细操控
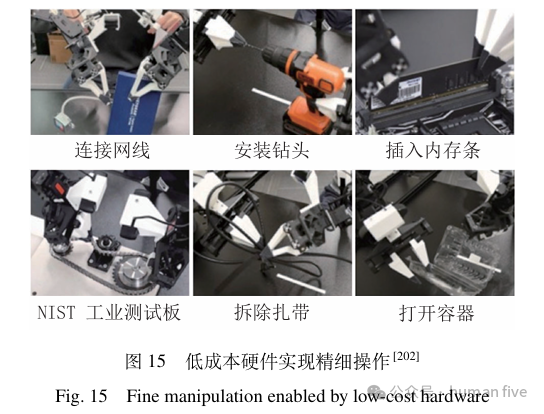
整套硬件成本低于2万美元,多目视觉Transformer预测多步连续动作,抵消硬件误差积累;三阶段Sim2Real迁移框架:仿真建模→渐进式域随机化→人机反馈调优;完成电池插入、钻头安装精密操作,任务成功率由60%提升至96%,操作周期缩短30%~40%。
2.2 可变产线柔性通用操控
面向多品类共线、频繁换产柔性场景,机器人无需重新编程即可完成跨工件、跨工序操作,分为通用策略蒸馏、元强化学习、交互表征、视觉语言动作(VLA)基础模型四大方向。
2.2.1 通用策略学习
1)策略蒸馏:将多个单工序专家网络融合为单一通用操控策略,AutoMate整合80类装配专家模型,未知零件±0.5~1mm公差下装配成功率88%;
2)元强化学习:在大量相似任务预训练基础策略,新工件仅需少量在线交互快速微调,适合插销、打磨等接触型任务。
2.2.2 交互表征建模
构建手爪与工件通用接触特征,实现跨夹爪、跨物体迁移:
1)2D可供性表征:定位图像最优抓取区域,VIMA、Instruct2Act依托SAM实现文本引导抓取;
2)3D交互平分曲面(IBS):精细建模接触力学,适配异形灵巧抓取、手内重定位。
2.2.3 VLA视觉语言决策两大范式
1)LLM高层规划(先规划后执行):PaLM-E、SayCan、Embodied-GPT,自然语言拆解为多段基础技能;核心难点多技能无缝衔接,T-STAR、DeCo优化前后工序起止状态对齐,实现工序自由组合;
2)端到端VLA模型:RT-1/RT-2、OpenVLA、3D-VLA,输入图像+自然语言直接输出机器人动作,零样本操作全新工件;短板为长时序复杂任务稳定性不足。
案例 RoboGrind通用打磨系统
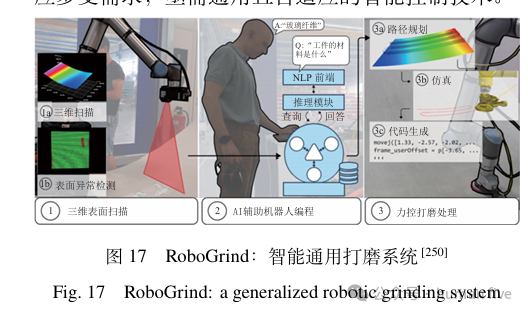
融合3D扫描感知、自然语言交互、力控强化学习;输入工件加工文字需求,自主生成打磨轨迹与动态接触力参数,适配风电叶片、航空结构件、船舶钢板多类曲面打磨,Ra≤0.8μm严苛加工标准。
2.3 工艺参数自适应调节
抓取、移动属于通用基础动作;焊接、打磨、螺栓紧固存在专属热、力学约束,固定工艺参数无法适配工件材质、磨损、热变形变化,需要基于实时感知动态调参。分焊接、打磨、精密螺栓装配三类工艺详细阐述。
2.3.1 弧焊自适应参数控制
熔池宽度、形貌直接决定焊缝强度;通过3D视觉实时采集熔池图像,CNN分割轮廓,梯度下降/强化学习闭环调节焊接电流、送丝速度、焊枪移动速度;系统7个控制周期内即可收敛至目标熔池尺寸,抑制未熔合、烧穿缺陷,适配铝合金、钢材多类工件混线焊接。
2.3.2 打磨工艺智能调参
表面粗糙度、材料去除量为核心指标;采用MAML元强化学习框架,维护优质经验回放池,实时根据曲面曲率、磨具磨损调整进给速度、接触压力;航空叶片打磨形状误差控制在±0.03mm以内。
2.3.3 螺栓拧紧力控自适应调节
螺纹摩擦系数、零件装配公差动态变化,扭矩-预紧力关系非线性;融合视觉定位与实时扭矩反馈,自适应滑模控制器动态调节拧紧速度与峰值扭矩,避免螺纹滑丝、连接松动,适配航空发动机高精度螺栓装配。
3 工业之脑(全局决策层)
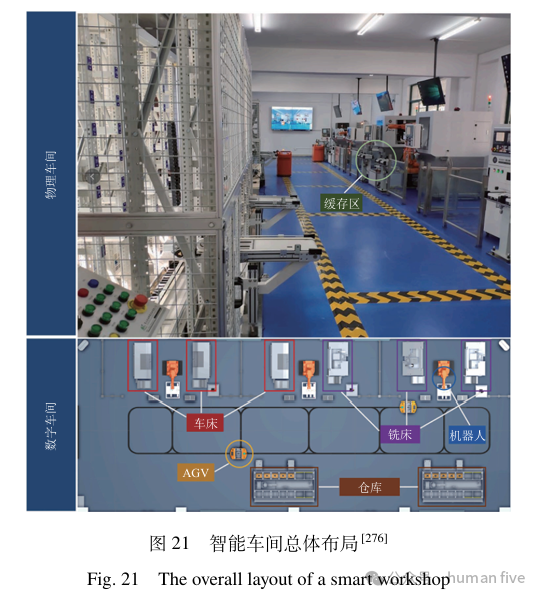
工业之脑是全厂级智能决策中枢,脱离单台机器人局部控制,面向多设备、多工序、动态订单、AGV物流、仓储资源进行全局协同优化,包含车间智能调度、数字孪生虚实同步、物理驱动世界模型三大模块。
3.1 工厂排产与资源智能调度
柔性车间存在三类经典NP难组合优化问题:车间作业调度JSSP、AGV车辆路径VRP、三维物料装箱码垛BPP;传统元启发式算法(遗传、禁忌搜索)仅能离线计算,无法应对插单、设备故障动态扰动,图神经网络、深度强化学习成为主流新方案。
3.1.1 车间作业调度JSSP
目标:最小完工时间、降低能耗、减少订单延期;将每台机床、机器人建模为独立强化学习智能体,分布式多智能体框架实时响应紧急插单、设备停机;SeEvo融合大模型自动生成优化启发式规则,动态迭代调度策略。
3.1.2 AGV路径规划VRP
车间多移动单元易拥堵、产生死锁;DIFUSCO、DISCO扩散模型大规模求解多车协同配送路径,兼顾运输时长、通道拥堵约束。

3.1.3 在线三维码垛BPP
来料尺寸动态变化,目标最大化托盘空间利用率、保障堆叠稳定;PCT、TAP-Net强化学习实时规划摆放位姿,无保护工业托盘空间利用率可达57.4%,单托盘平均装载19个标准箱体。
案例 分布式多智能体动态调度
南京航空航天团队将车间每台加工设备、搬运AGV建模为边缘智能体,嵌入PPO优化AI调度单元;面对临时插单、机床故障自动重新分配工序,云边协同架构兼顾局部实时响应与全局产能最优。
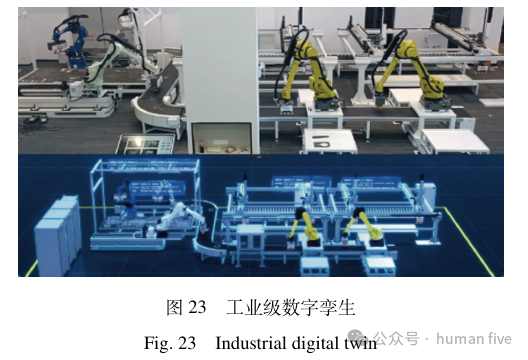
3.2 数字孪生虚实同步
数字孪生构建物理车间1:1实时数字镜像,打通物理实体与虚拟空间双向数据流,支撑工艺预调试、预测性维护、全局协同调度,分为虚拟模型自动构建、虚实状态同步、孪生驱动生产优化三部分。
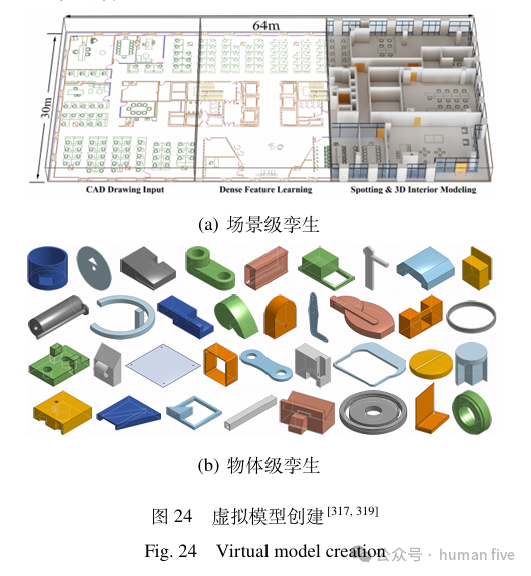
3.2.1 虚拟模型自动化构建
1)CAD图纸智能解析:CADTransformer识别图纸设备、工装符号,快速生成车间三维场景;
2)点云-CAD检索:现场扫描工件点云,在模型库匹配对应CAD模型,大幅降低非标产线建模成本。
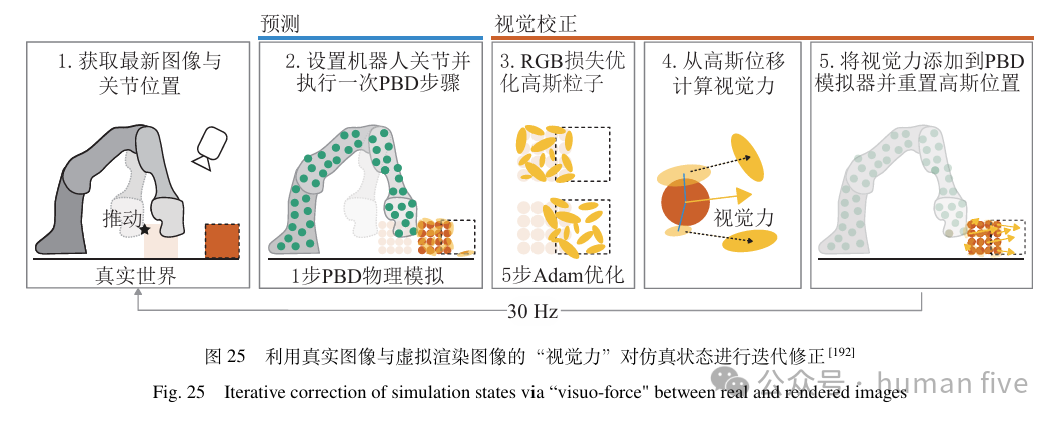
3.2.2 虚实实时同步机制
多模态传感数据实时映射虚拟场景;针对遮挡造成点云缺失,采用点云修复、遮挡感知几何对齐;搭配高斯可微渲染计算虚实视觉误差,迭代修正虚拟模型姿态、几何参数,实现毫秒级同步映射。
3.2.3 数字孪生工业应用
1)新工艺虚拟预调试:无需改造实体产线,在孪生环境仿真工序、设备布局,大幅降低实物试产成本;
2)设备预测性维护:虚实同步采集振动、温度数据,提前预判轴承、电机故障;
3)云-边协同调度:云端全局统筹排产,边缘单元本地实时机器人控制;
案例 工业低代码数字孪生平台
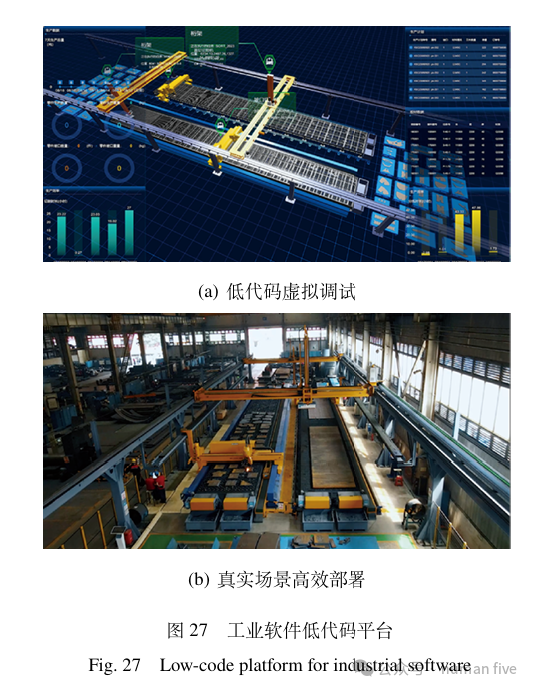
模块化拖拽式开发框架,封装建模、监控、调度标准化组件,用户无需专业建模知识快速搭建车间孪生系统,支持虚拟调试参数一键下发至实体设备,降低智能制造开发门槛。
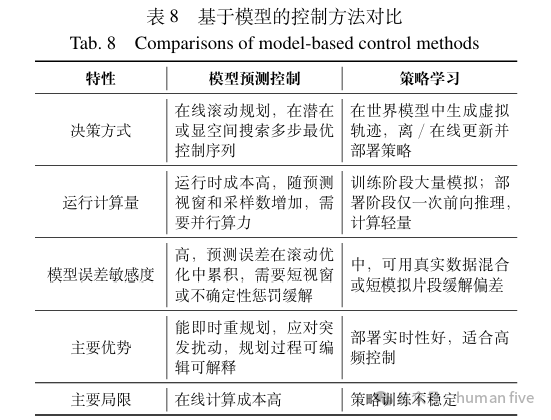
3.3 世界模型物理感知与预测
世界模型核心是学习制造系统完整动力学规律,依靠历史传感数据预测未来工件、设备状态,支撑前瞻性控制与离线策略训练,分为纯数据驱动、物理信息神经网络PINN、可微物理世界模型三类。
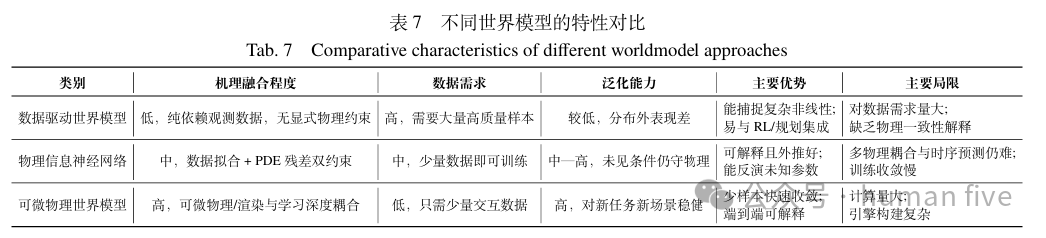
3.3.1 纯数据驱动世界模型
代表框架Dreamer、TD-MPC,仅依靠图像、时序数据隐式建模环境动力学;无需物理公式,适合简单稳定工序;缺陷全新工况预测失真严重。
3.3.2 PINN物理信息神经网络
将热传导、流体、刚体力学偏微分方程纳入损失函数,少量红外测温数据即可预测焊接、增材制造内部温度场,解决无法直接观测内部热梯度难题,焊接、金属加工领域落地广泛。
3.3.3 可微物理世界模型(∇Sim、PIN-WM)
耦合可微渲染与刚体/柔体动力学,仿真全过程支持梯度反向传播;仅少量真实交互数据即可精准辨识摩擦、接触等复杂力学,螺栓拧紧、精密装配仿真精度极高。
案例 NVIDIA Factory仿真世界模型
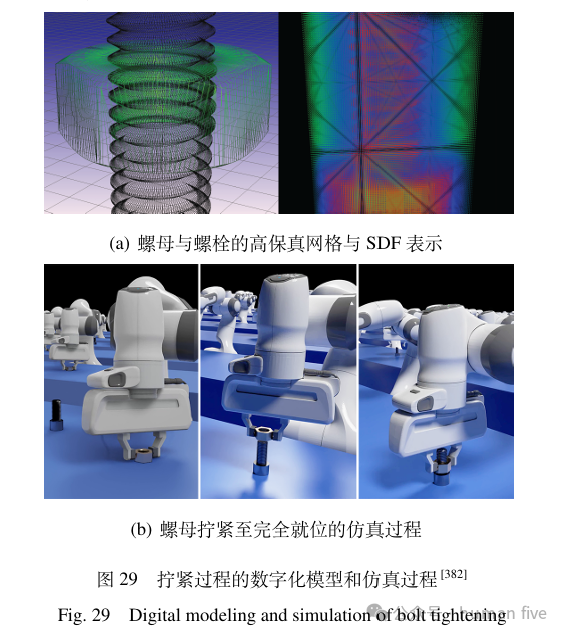
基于SDF符号距离场加速千级螺母-螺栓接触仿真,运算速度提升20倍;在虚拟环境大量试错训练拧紧控制策略,再迁移至实体机械臂,大幅减少实物测试损耗。
4 人形机器人与柔性制造
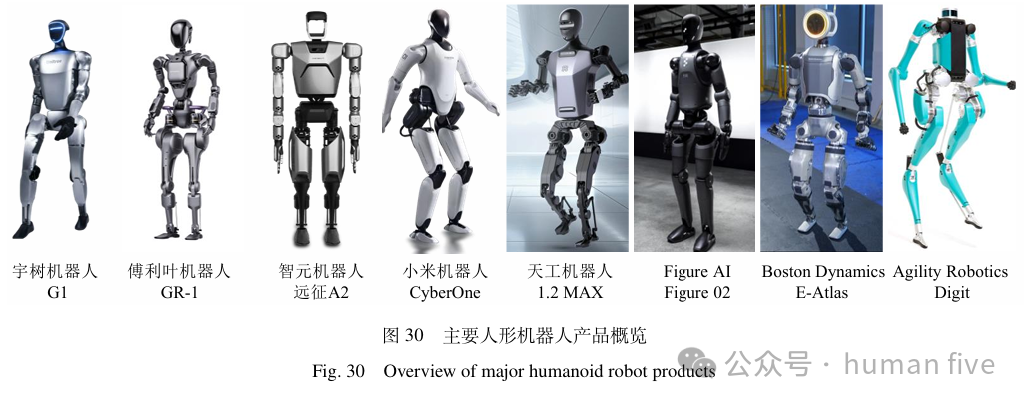
传统车间工位、工装、通道、操作台均按照人体尺度设计,传统固定机械臂改造产线成本高昂;人形机器人双臂、双足、全身运动结构天然适配现有工厂环境,无需大规模产线重构,完整集成工业眼、手、脑三层具身智能体系,本章介绍核心技术与国内外落地案例。
4.1 人形机器人核心技术
1)全身统一控制器:MPC模型预测控制、自适应二次规划AMO,实现行走、攀爬、抓取一体化高频控制;
2)跌倒容错恢复:分层强化学习,区分侧卧、俯卧、跪姿多种倒地模式,自主起身恢复作业;
3)Sim2Real快速迁移:ASAP、FastTD3缩短虚实域差距,降低实机调试损耗;
4)标准化仿真基准HumanoidBench,统一行走、操作任务评测指标。
4.2 国内外工业落地实例
国外:特斯拉Optimus工厂物料分拣;Figure 01宝马整车装配;Sanctuary Phoenix轻工质检搬运;
国内:优必选Walker S蔚来汽车车门、车灯检测;智元远征A1 3C齿轮点油、底盘装配;华为鸿蒙夸父机器人完成焊锡、扫码包装非标工序。
5 现有研究关联、演进模型与现存挑战
5.1 三层技术内在耦合关系
工业之眼(认知增强)是底层基础,完备多模态环境表征是工业之手柔性操控的输入前提;工业之手(技能跃迁)依托精准感知实现通用+工艺融合操作,输出稳定执行数据供给工业之脑;工业之脑(系统进化)统筹全局资源调度,反向下发工序、轨迹任务给单台机器人,三层形成“感知-执行-决策”闭环耦合,逐级递进、相互反馈。
5.2 三阶段完整演进模型:认知增强—技能跃迁—系统进化
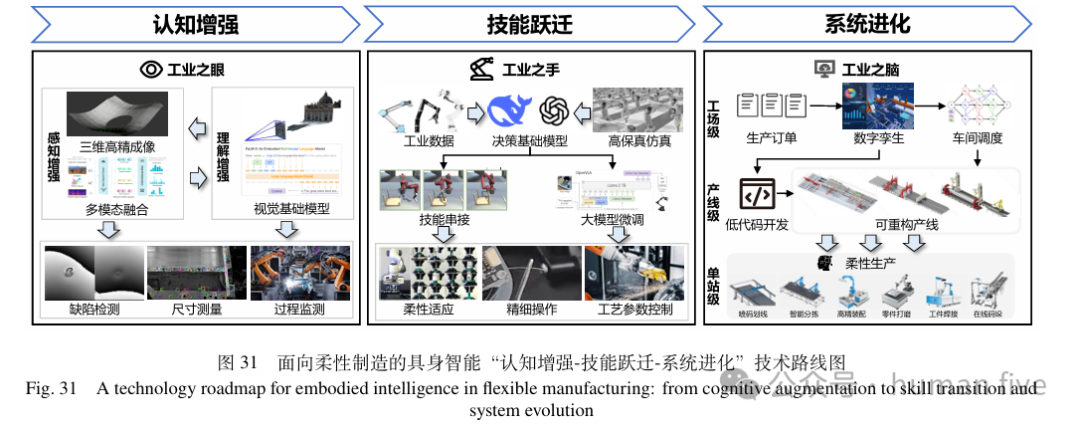
1)认知增强阶段(工业之眼主导):核心突破受限感知建模,依靠3D视觉、多模态融合、视觉基础模型消除遮挡、反光带来感知缺失,建立完整工件、工艺表征,解决“看得清、测得准”基础问题;
2)技能跃迁阶段(工业之手主导):依托完备环境认知,通过元学习、虚实迁移、VLA大模型实现跨工件柔性高精操作,打通通用动作与行业工艺协同,解决“操作自适应”问题;
3)系统进化阶段(工业之脑主导):从单机器人局部智能升级为全厂全局协同,数字孪生+多智能调度实现多设备、动态订单全局优化,产线具备自主迭代进化能力,解决全厂级柔性生产优化。
5.3 行业六大核心现存挑战
1)工业高质量共享数据集缺失:企业工艺数据涉密,采集、标注成本极高,缺少兼顾隐私保护、可跨企业复用的工业感知、操控数据集;
2)高保真多物理工业仿真稀缺:现有仿真仅支持刚体动力学,缺少焊接热变形、金属柔体、流体耦合引擎,虚实鸿沟难以消除;
3)工业专用视觉-动作基础模型空白:现有VLA大模型面向家用通用物体,缺少焊接、打磨、装配等工艺专属大模型;
4)边缘设备轻量化瓶颈:车间工控、机器人嵌入式设备算力有限,大模型推理时延无法匹配高生产节拍;
5)软硬件跨厂商标准化缺失:机器人、传感器、调度系统通信协议、数据格式不统一,系统集成成本极高;
6)多层级复合型安全风险:网络攻击、大模型幻觉、人机物理碰撞构成网络-算法-物理三重安全隐患,缺少一体化防护体系。
6 未来发展趋势
1)隐私计算驱动跨企业协同工业数据基础设施,实现数据可用不可信;
2)多物理场耦合工业仿真引擎研发,集成热、流体、柔体、接触动力学;
3)面向焊接/装配/打磨的工艺专用视觉-动作基础模型研发;
4)模型量化、蒸馏、分布式边缘轻量化算法,适配低算力工控设备;
5)统一硬件接口、通信协议、数据格式的工业具身行业标准制定;
6)融合网络安全、算法校验、人机碰撞监测的全生命周期安全管控体系。
7 结论
本文系统梳理面向柔性离散制造的工业具身智能完整研究体系,围绕受限感知建模、柔性与高精度平衡、通用工艺融合三大行业核心痛点,以“工业之眼、工业之手、工业之脑”三层架构分层综述3D高精感知、多模态融合、自适应机器人操控、视觉语言大模型、车间智能调度、数字孪生、物理世界模型等关键技术,搭配汽车、船舶、航空、3C、人形机器人多类工业落地案例验证技术实用价值。基于多层级技术耦合关系,提出“认知增强—技能跃迁—系统进化”三阶段行业演进模型,归纳数据、仿真、专用大模型、轻量化、标准化、安全六大发展瓶颈,为柔性制造领域工业具身智能跨学科理论研究与工程落地提供完整、体系化理论支撑与实践参考。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 5
5 0
0- 0



 已为社区贡献155条内容
已为社区贡献155条内容

所有评论(0)