AI硬件涨疯了,虚拟仿真学具身智能“真香”了
数十万的整机、高昂的场地与运维成本——硬件门槛正将大批高校师生挡在门外。如何在成本可控的前提下,让更广大的教学与科研群体迈入具身智 能的大门?
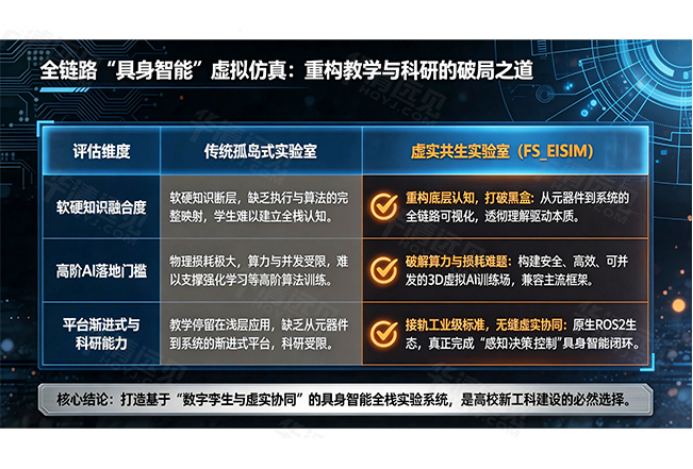
具身智能虚拟仿真软件覆盖从电机驱动、ROS通信、强化学习到大模型决策的完整开发链路,让抽象的机电闭环与AI算法清晰可见,打造可拆解、可调参、可复现的具象化教学空间。

一、具身智能实验室配置:

二、具身智能高校师资班:
(华清远见第34届高校师资班正在报名中,于2026年8月3日-8月7日开班)
报名网址:元宇宙实验中心
依托具身智能机器人虚拟仿真系统(FS_EISIM) ,5天时间,可系统掌握具身智能从 “大模型任务规划(Agent)→ 强化学习运动决策(PPO/AMP)→ 通信协议控制(ROS2/MQTT)→ 整机执行” 的全栈技术链路,覆盖了感知之外的 “决策与执行”全闭环。
三、具身智能课程体系:
1)打通机器人控制链路:从命令下达到物理响应实战
通信与控制是具身智能的神经系统。从MQTT/ROS2通信层到底层电机硬件层,完整拆解命令下达到执行的全链路。可亲手搭建开发环境,在仿真平台上完成机器人控制与传感器数据获取,形成分层控制认知——真正理清硬件层、通信层、控制层如何协同。
2)让机器人学会走路:强化学习驱动的步态控制实战
让机器人学会走路,强化学习是关键。课程将系统讲解Q-Learning、Sarsa、PPO等经典算法,并重点演练PPO+Motion Imitation+AMP在站立、行走、拟人步态等场景的实战应用。依托虚拟仿真平台“训练-推理一体化”设计,教师将亲手跑通从算法到仿真的完整链路。
3)让机器人学会决策:大模型Agent与具身智能融合实战
2026年,具身智能课程必须拥抱大模型。聚焦“大模型Agent + 具身智能”前沿,深度融合DeepSeek V4 function call、Hermes框架、MCP协议与机器人控制,让大模型真正成为机器人的“大脑”。课程将感知、记忆、规划与执行能力工程化落地,打通LLM理解、技能调用与MQTT控制全链路,最终实现“QQ消息 → Agent → 机器人动作”的智能机器人原型。
4)让技术落地实战:全流程动手操练,拒绝纸上谈兵
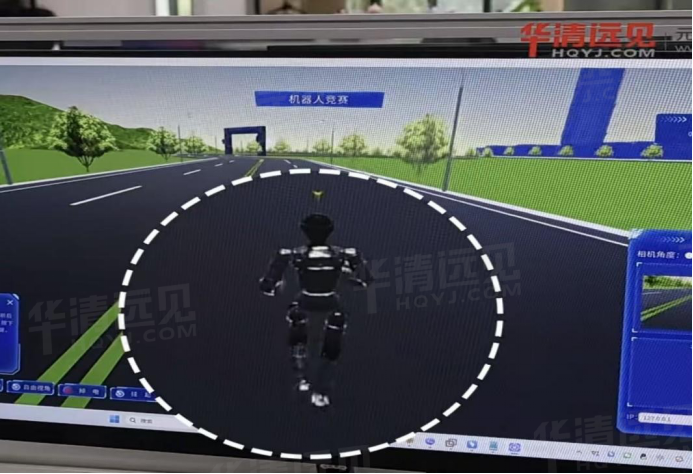
虚拟仿真系统基于1:1数字孪生技术,从关节运动轨迹到整机动力学特性,与实物机器人完全一致。仿真调试完成的代码可直接移植至实物,零成本迁移,零适配损耗。
课程设置全流程实操,覆盖镜像启动、ROS2/MQTT自检、Web手柄开发、Skill设计到QQ网关接入。采用“大屏理论讲解 + 虚拟仿真实操”双平台模式,每模块配套专属仿真实验,边学边练。
5)AI贯穿教学全程,预演课堂新模式
模拟工程师的真实工作方式,将Claude Code + cc-switch + DeepSeek V4三大AI编程助手贯穿学习全流程。可将亲身体验“AI结对编程”如何将开发效率提升一个量级——为未来教学模式的真实预演。
6)让安全融入工程:工业级安全素养从课堂抓起
“能跑起来”不等于“能安全落地”。工业场景中,安全是底线。
课程将“单控制源、限速、急停、断连停止”四件套,在协议层与Skill层双重落地。虚拟仿真环境提供零风险演练场,可反复验证安全策略,培养真正符合工业标准的工程素养。
7)打造智能机器人Agent系统:从QQ消息到物理动作
打造完整的智能机器人Agent原型:打通大模型理解能力、Skill工具箱与MQTT控制全链路,完成“QQ消息→理解意图→调度Skill→控制动作”的端到端闭环。交付的不只是知识,更是一套可复用、可拓展的系统架构,可直接移植到教学与科研中。
8)教学有资源,科研有平台,实验室有体系——一站式赋能
一整套具身智能教学资源池:
底层:具身机器人虚拟仿真平台(FS_EISIM)与仿真镜像,夯实教学基础设施
中层:PPO/AMP训练工程与Hermes Skill范例,科研教学双栖复用
上层:Scratch模板、Web手柄骨架、实验代码与教案,助力开学即用底层有平台、中层有案例、上层有支撑——一站式赋能课程建设与实验室升级,让虚拟仿真教学常态化落地。
9)从“硬件依赖”到“仿真先行”:具身智能教学的必然选择
当AI硬件价格持续攀升,虚拟仿真已从“备选方案”升级为具身智能教学的必然选择。
具身智能虚拟仿真系统,搭载与真实机器人一致的物理引擎,构建精准的数字孪生体。通过高度还原的案例场景,不仅推动强化学习从理论走向实践,更让教学用对方法、走对路径。
后台私信了解更多。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)