为什么要坚持出厂做完标定?聊聊视觉方案的底层细节
各位行业同仁、技术伙伴,大家好!
上期和大家聊了图像与IMU的硬件同步,很多朋友看完来找我交流,问得最多的一个问题是:是不是把时间同步做准了,视觉惯性融合的效果就一定差不了?
其实真不一定。时间同步解决的是 “数据在时间上对不对齐”,但还有一件同样重要的事,决定了数据在空间上对不对得准——就是标定。
很多人对标定这个词既熟悉又陌生。知道做视觉方案要标定,但具体标定什么、为什么非得做、做不好会有什么后果,往往说不太清。
今天众鑫创展就用大白话把这件事讲透,结合大家平时做机器人、机械臂、三维采集的实际场景,说说标定到底为什么绕不开。
一、标定到底是个啥?
打个最通俗的比方:标定就像给你的传感器系统统一度量衡。
你拿一把尺子去量东西,首先得保证这尺子的刻度是准的。如果尺子本身刻度画歪了、单位长度不准,那量出来的结果自然全是错的。其次,如果你和同事各拿一把尺子,两把尺子的标准不一样,那你们测出来的数据也没法放在一起用。
标定干的就是这两件事:先把单个传感器的 “刻度” 校准,再把多个传感器的 “坐标系” 对齐。
落到视觉 + IMU的方案里,第一层是单个传感器的自我校准,比如相机镜头因为工艺原因,天生会有畸变,画面边缘会弯、焦距和标称值有偏差,标定就是把这些误差算出来,修正成真实的成像结果。第二层是多传感器之间的空间对齐,双目摄像头有左右两个镜头,IMU又单独固定在模组上,它们彼此之间的位置、角度都有细微偏差。标定就是把这些偏差精准算出来,让所有传感器的数据都能映射到同一个坐标系里,真正能用在一起。
说直白点,同步是让数据 “时间上对得上”,标定是让数据 “空间上对得准”。两个都做好了,视觉和IMU的融合才真的有意义。缺了哪一个,最终效果都会打折扣。
二、三类标定,分别决定了什么?
视觉摄像头方案要过三关标定,有一关没做好,都会在实际项目里直观地反映出来。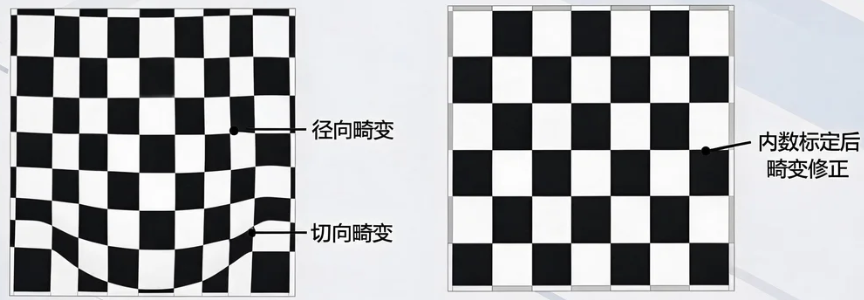
第一关是相机内参标定。这是最基础的,针对单个摄像头。镜头和感光芯片在生产的时候,不可能做到百分百完美,焦距会有误差、光心不一定在画面正中心、镜头还会有径向和切向的畸变。内参标定就是把这些参数都算出来,后续成像的时候做修正。
别觉得这点误差无所谓。放在工业机械臂抓取的场景里,镜头畸变带来的像素偏差,换算到实际工作距离上,可能就是几毫米的定位误差。抓小件产品的时候,这几毫米就足以导致抓取失败。
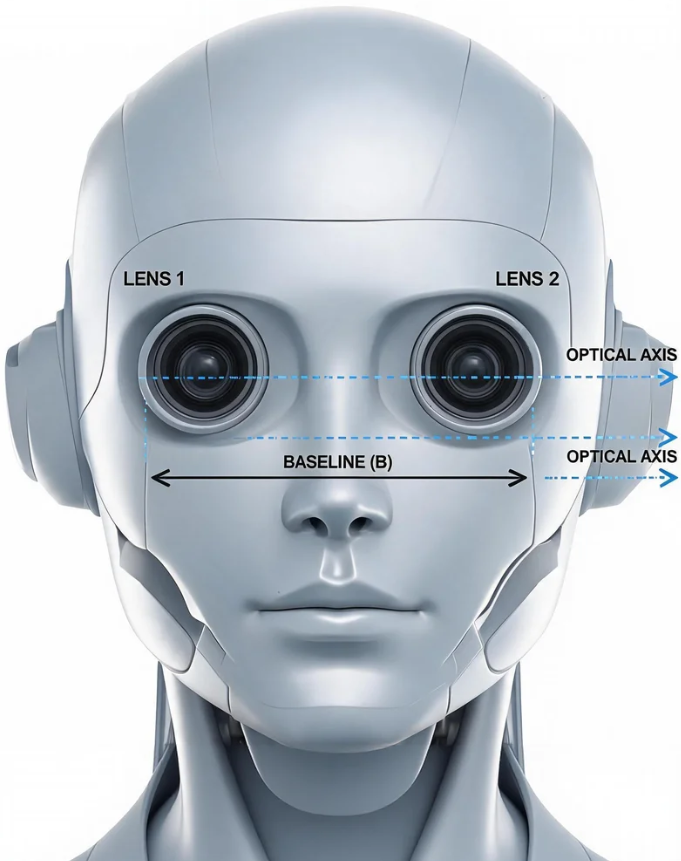
第二关是双目立体标定。双目靠左右画面的视差算深度,前提是必须精准知道两个镜头之间的相对位置和角度。两个镜头离多远、彼此有没有倾斜,这些参数差一点点,算出来的深度就会差很多。
这一点在机器人建图场景里感受最明显。双目标定不准,出来的深度图就会重影、扭曲,点云忽远忽近。人形机器人或者机器狗在巡检的时候,建出来的地图歪歪扭扭,障碍物测距不准,导航和避障自然就稳不了。
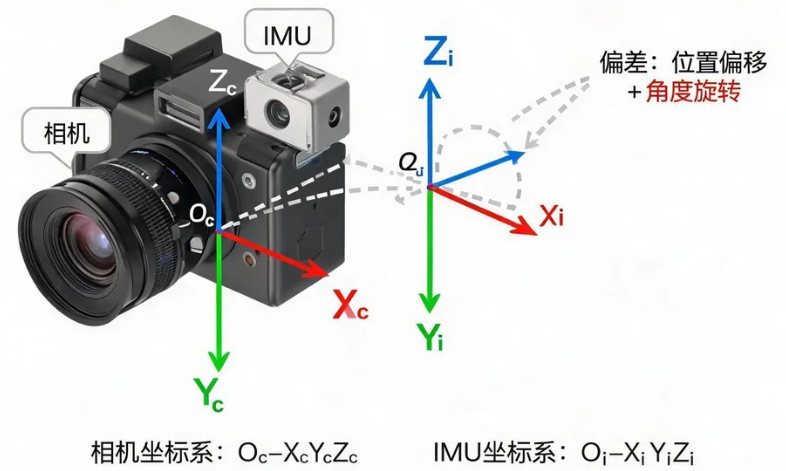 第三关是相机与IMU的外参标定,这也是很多人最容易踩坑的地方。IMU固定在模组上,它的坐标系和相机的坐标系肯定不重合,位置和角度都有偏差。外参标定就是算出这个偏差值,把IMU输出的角速度、加速度数据,准确对应到相机的视角里。
第三关是相机与IMU的外参标定,这也是很多人最容易踩坑的地方。IMU固定在模组上,它的坐标系和相机的坐标系肯定不重合,位置和角度都有偏差。外参标定就是算出这个偏差值,把IMU输出的角速度、加速度数据,准确对应到相机的视角里。
很多人说自己加了IMU也没觉得效果好,很大概率就是这一步没做准。时序对齐得再完美,空间坐标对不上,融合出来的数据照样飘。尤其是高速运动的时候,偏差会被放得更大,该稳的地方还是稳不住。
三、放到数据采集场景里,标定不准有多要命?
讲完概念,咱们落到实际项目里说说,为什么人形机器人、机器狗、机械臂对标定精度这么敏感?
人形机器人和四足机器狗,本身就在持续运动,走路有颠簸,转向、跨障碍、上下台阶的时候,运动状态变化特别剧烈。这种场景下,视觉和 IMU的融合精度要求本来就高。
如果标定没做好,低速慢走的时候可能还看不出来,一旦跑起来、快转起来,问题立刻就暴露了:点云开始漂移,建图出现断层,定位跟着丢。机器人走着走着就不知道自己在哪了,巡检任务自然没法正常完成。
很多团队一开始会怀疑是不是IMU不够好、算法不够强,折腾半天最后发现,根源是相机和IMU的外参标定有偏差。高速运动下,微小的角度误差都会被积分放大,最终变成厘米级的空间错位。
而机械臂场景下,通常摆臂速度快、加速度大,现在越来越多的项目要求动态扫描、在线抓取,不用停下来拍照。这种动态作业对同步和标定的要求是双重的。
标定不准的话,机械臂动起来之后,视觉定位和实际位置就会有偏差。抓工件抓不准、外观检测测不准,轻则返工重则出次品。很多产线最后只能退回到静态采集,臂停稳了再拍,效率上不去,动态方案等于白做。
还有头戴式、手持三维数采的场景。操作人员拿着设备到处走、频繁转头,轨迹很灵活。传统方案之所以重建出来的模型断层多、错位多,除了同步问题,标定精度不够也是重要原因。
帧与帧之间的空间对齐不准,拼出来的模型自然就裂了。后期工程师要花大量时间补洞、修正,返工成本很高。看似省了硬件成本,其实都从人工成本里找补回去了。
四、为什么我们不建议客户自己折腾标定?
经常有客户说,标定不就是拿个标定板拍几张照,跑个开源算法的事吗?自己做做也不难。
原型阶段凑合用确实不难,但要做到量产级的稳定和精度,里面的坑远比想象中的坑要多得多。
首先是环境门槛高。标定对标定板精度、光照均匀度、采集的角度和距离都有要求。实验室环境还好,到了客户现场,光照条件复杂、标定板用久了有磨损,标出来的结果精度就没保障了,而且误差藏在数据里,不上机跑很难发现问题。
其次是操作成本高。合格的标定不是随便拍几张就行,要覆盖不同角度、不同距离、不同姿态,采集流程有讲究。操作不规范,人为引入的误差很大。标定完了还要验证精度,来回调试非常耗时间。
最头疼的还是量产问题。原型机调好了不算数,量产的时候每一台设备的安装都有细微公差。人工逐台标定,效率低、一致性差,不同批次的设备精度参差不齐,后期出了问题排查起来也麻烦,维护成本很高。
这也是我们在所有Ego相机模组里,坚持出厂就做完所有标定的原因。在工厂标准化的环境下,用专业设备统一完成内外参的全流程标定,每一台的参数都可追溯。
对数据采集的客户来讲,时间真的就是金钱!拿到手不用再买标定板、不用搭标定环境、不用安排工程师反复调试,直接集成到设备里就能用,直接省掉几个月的底层调试工作量。
时间同步和标定,是视觉惯性融合的两根支柱。一根管时间对齐,一根管空间对准,少了哪根都站不稳。很多项目效果不达预期,不是传感器选得不够好,也不是算法不够先进,而是这些底层的基础工作没做扎实。差之毫厘谬以千里,放在高动态场景里尤其明显。
如果大家有摄像头选型、硬件搭配、集成调试、样品测试及批量采购等需求,欢迎评论区留言或私信我们交流,众鑫创展竭诚为您提供专业的技术支持与配套服务!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 13
13 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)