【机器人探索】基于未知环境改良的Lévy步道和势场多机器人探索碰撞避免、动态地图合并和物体检测附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、算法改进、程序设计科研仿真。
🍎 往期回顾关注个人主页:完整代码获取 定制创新 论文复现私信
🍊个人信条:做科研,博学之、审问之、慎思之、明辨之、笃行之,是为:博学慎思,明辨笃行。
🔥 内容介绍
在未知环境中进行高效的多机器人探索任务,对于诸如灾难救援、外星探测、大型设施巡检等领域具有重要意义。Lévy 步道作为一种随机搜索策略,在探索未知空间时展现出独特优势,而势场法常用于解决机器人的路径规划与碰撞避免问题。将两者结合,并融入动态地图合并与物体检测功能,能进一步提升多机器人在未知环境中的探索能力。
改良的 Lévy 步道
Lévy 步道基础原理
Lévy 步道是一种随机游走模式,其步长分布遵循 Lévy 分布。与传统随机游走不同,Lévy 分布具有重尾特性,即偶尔会出现较长的步长。这种特性使得机器人在探索过程中,既能在局部区域进行细致搜索,又能通过偶尔的长距离移动,快速到达新的区域,提高探索效率。其步长 s 的概率密度函数可表示为:

改良策略
-
自适应步长调整:根据环境的探索程度自适应调整 Lévy 指数 α。在探索初期,设置较小的 α 值,使机器人能够快速覆盖较大区域。随着探索的推进,当检测到环境中大部分区域已被探索,逐渐增大 α 值,促使机器人进行更细致的局部搜索,以发现潜在的遗漏区域或物体。
-
目标导向步长修正:当机器人检测到可能存在感兴趣物体的区域(通过传感器数据初步判断),优先向该区域移动,并适当缩短步长,进行更精确的探索。例如,当机器人的传感器检测到前方区域的信号强度异常(可能表示有物体存在),则以较小的步长逐步靠近该区域,同时调整方向以更好地获取目标信息。
基于势场的碰撞避免
势场法原理
势场法将机器人周围环境视为一个势场,目标点产生吸引势场,障碍物产生排斥势场。机器人在这个势场中受到合力作用,沿着势场梯度下降的方向移动,从而趋向目标点并避开障碍物。
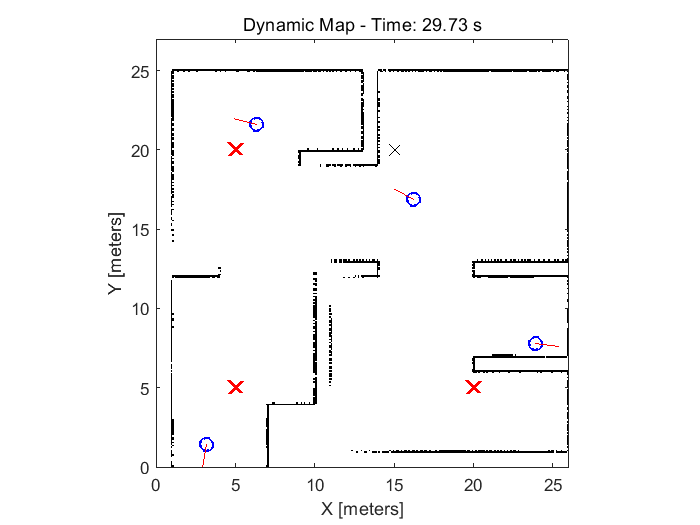
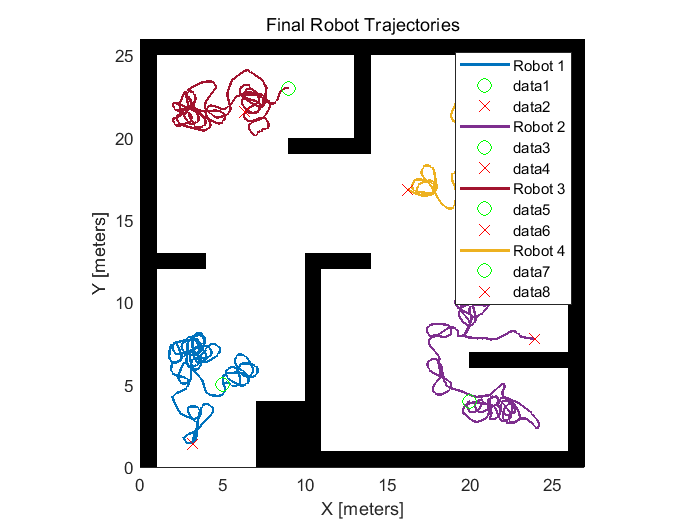
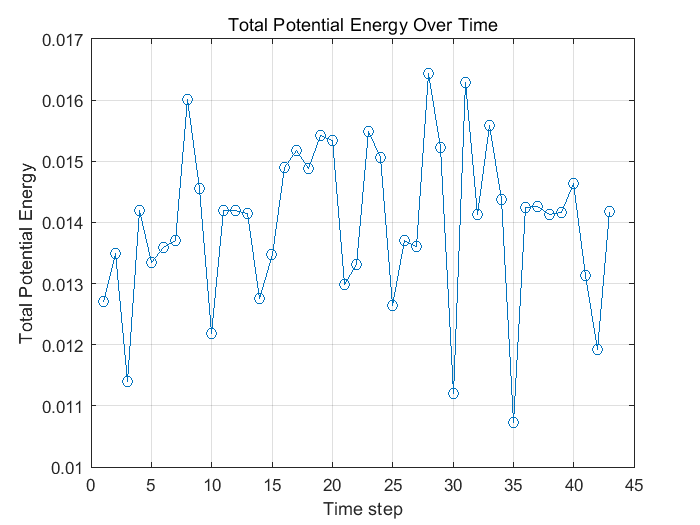
⛳️ 运行结果
📣 部分代码
function plotResults(refMap, robotTrajectories, globalMap, objectLocations, detectedObjects, V_total)% PLOTRESULTS Show final outputs: trajectories, merged map, potential energy.% Final trajectories overlayed on ground truth mapfigure('Name','Final Robot Trajectories');hold on; grid on;show(refMap);for r = 1:numel(robotTrajectories)traj = robotTrajectories{r};plot(traj(:,1), traj(:,2), 'LineWidth', 1.5, 'DisplayName', sprintf('Robot %d', r));plot(traj(1,1), traj(1,2), 'go', 'MarkerSize',8);plot(traj(end,1), traj(end,2), 'rx', 'MarkerSize',8);endlegend(); title('Final Robot Trajectories');hold off;% Merged map with detected objectsfigure('Name','Merged Map');show(globalMap); hold on;for o = 1:size(objectLocations,1)if detectedObjects(o)plot(objectLocations(o,1), objectLocations(o,2), 'rx', 'MarkerSize',10, 'LineWidth',2);elseplot(objectLocations(o,1), objectLocations(o,2), 'kx');endendtitle('Merged Map with Detected Objects');hold off;% Potential energy over timeif ~isempty(V_total)figure('Name','Potential Energy');plot(1:length(V_total), V_total, '-o');xlabel('Time step'); ylabel('Total Potential Energy');title('Total Potential Energy Over Time'); grid on;endend
🔗 参考文献
🍅更多免费数学建模和仿真教程关注领取

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献415条内容
已为社区贡献415条内容

所有评论(0)