【机器人学中的状态估计】第二讲 线性高斯系统的状态估计问题
- 离散时间的批量估计
- 离散时间的递归平滑算法
- 离散时间的滤波算法
- 连续时间的批量估计
https://www.tipsonunix.com/2021/04/how-to-install-linux-kernel-5-12-in-ubuntu-linux-mint/
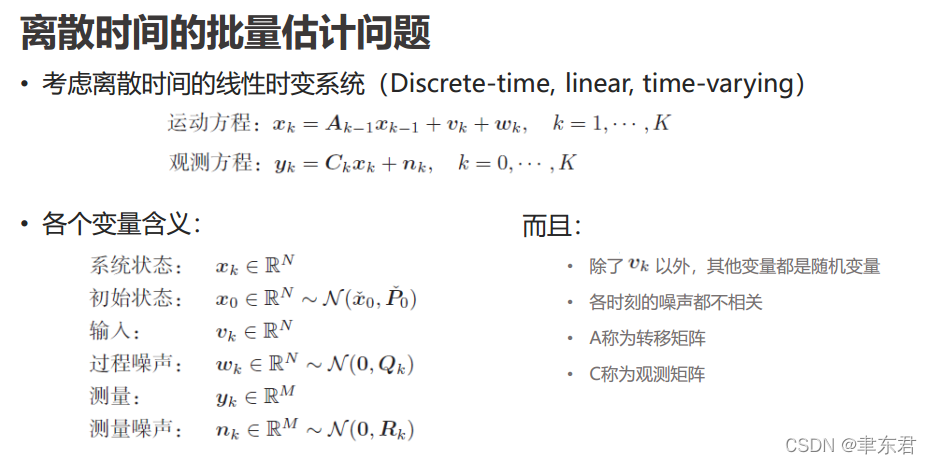
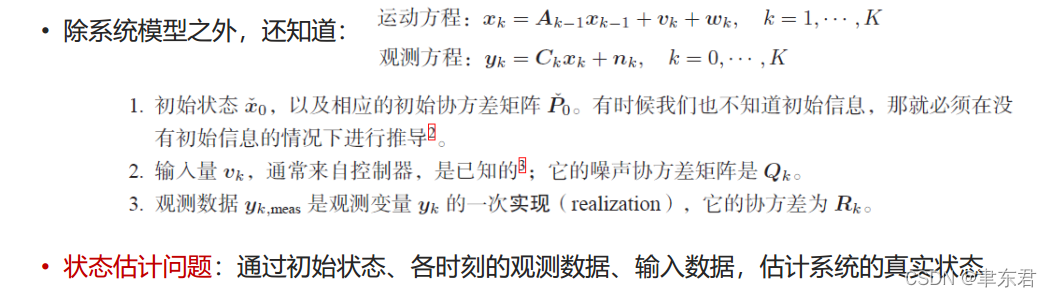
<一> 离散时间的批量估计问题
1. 线性高斯系统
2. 批量问题的解法
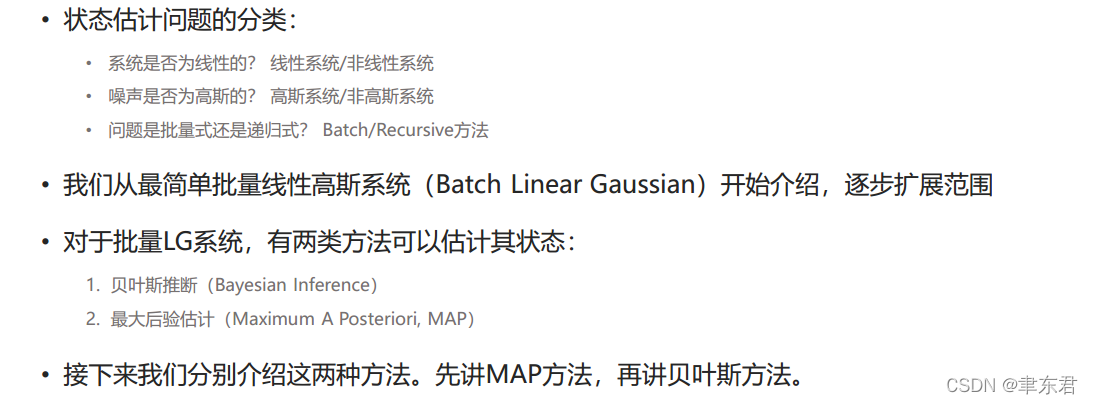
贝叶斯推断,用高斯分布去近似;
最大后验估计,没有要求是高斯分布。
两者在高斯分布的情况下是一样的,但在非高斯分布的情况下有所不同。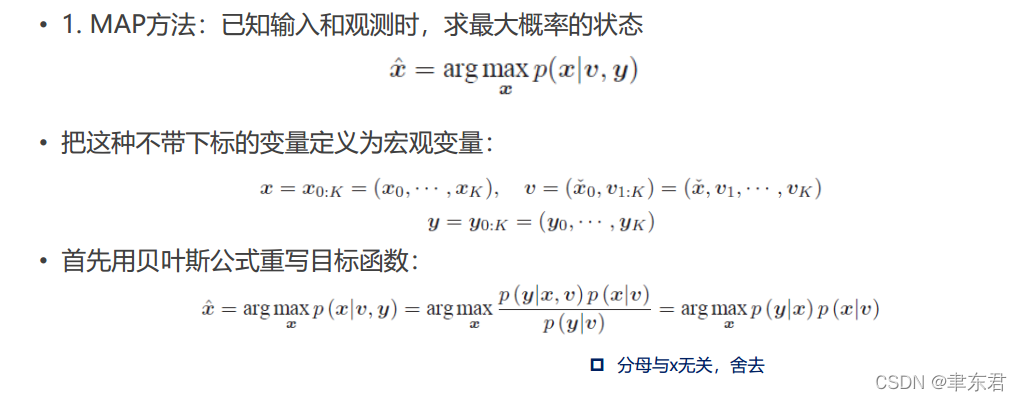
vvv是输入,是个已知量,不是随机变量,因此它在推导中一直被放在随机变量后面。且vvv是通过作用于xxx在作用于yyy的,与yyy没有直接关系,所以在同时有xxx和vvv作为已知条件的情况下可以把vvv去掉。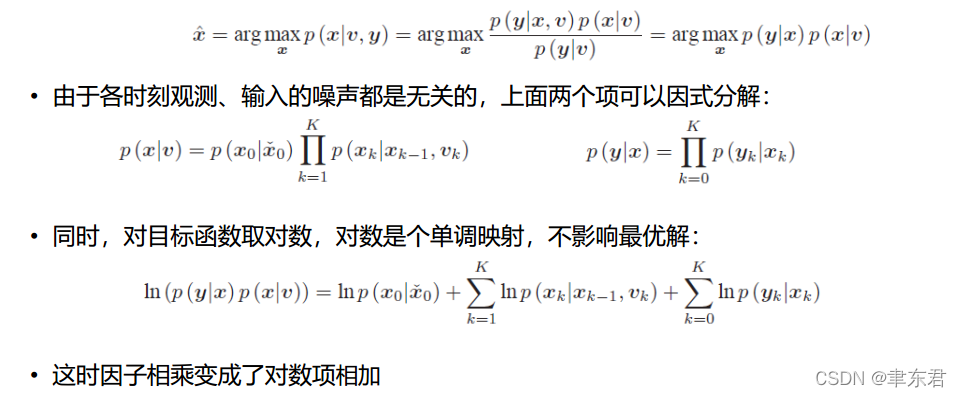
哭了,这个就是我需要的公式。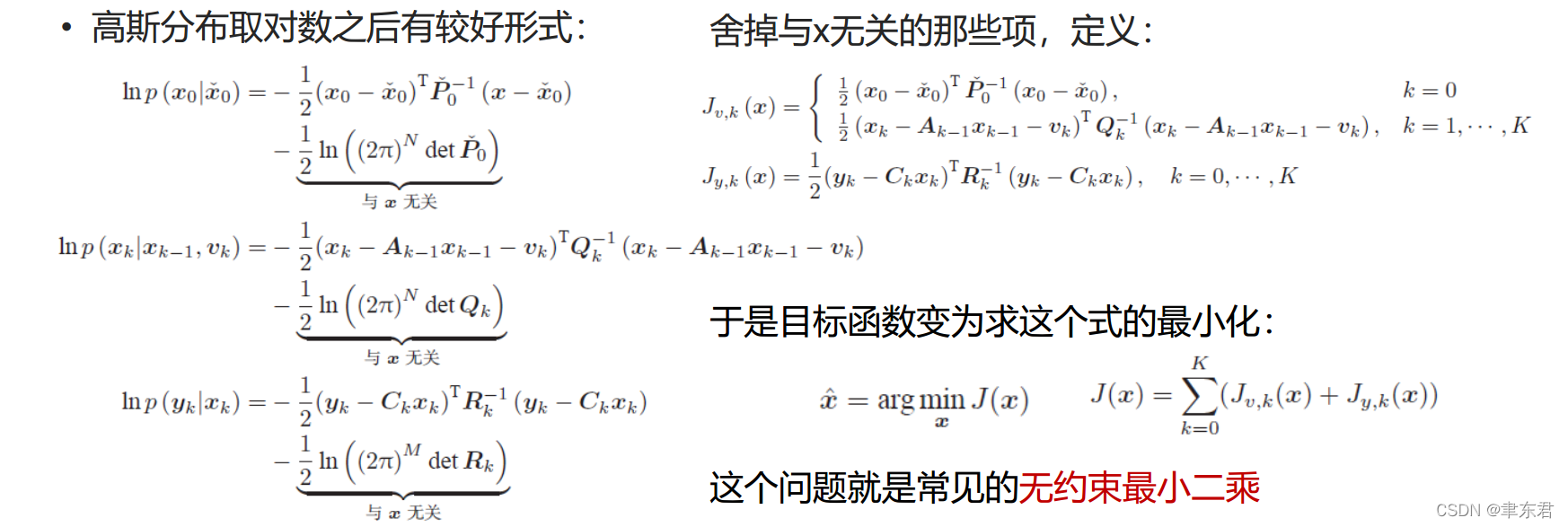
x0∼N(x0ˇ,P0ˇ)p(x0∣x0ˇ)=1(2π)Ndet(Pˇ)exp(−12(x0−x0ˇ)TP0ˇ−1(x0−x0ˇ)) x_0 \sim N(\check{x_0},\check{P_0}) \\p(x_0|\check{x_0}) = \frac{1}{\sqrt{(2\pi)^N det(\check{P})}} exp(-\frac{1}{2}(x_0-\check{x_0})^T{\check{P_0}^{-1}(x_0- \check{x_0})}) x0∼N(x0ˇ,P0ˇ)p(x0∣x0ˇ)=(2π)Ndet(Pˇ)1exp(−21(x0−x0ˇ)TP0ˇ−1(x0−x0ˇ))
xk∼N(Ak−1xk−1+vk,Qk)p(xk∣xk−1,vk)与上面类似 x_k \sim N(A_{k-1}x_{k-1}+v_k,Q_k) \\p(x_k|x_{k-1},v_k)与上面类似 xk∼N(Ak−1xk−1+vk,Qk)p(xk∣xk−1,vk)与上面类似
yk∼N(Ckxk,Rk)p(yk∣xk)与上面类似 y_k \sim N(C_kx_k,R_k) \\p(y_k|x_k) 与上面类似 yk∼N(Ckxk,Rk)p(yk∣xk)与上面类似
无论是Jv,kJ_{v,k}Jv,k还是Jy,kJ_{y,k}Jy,k都是二次型,也可以理解为平方误差(即二乘)的形式,它们都是一个标量。
把所有时刻下的运动和观测方程写在一起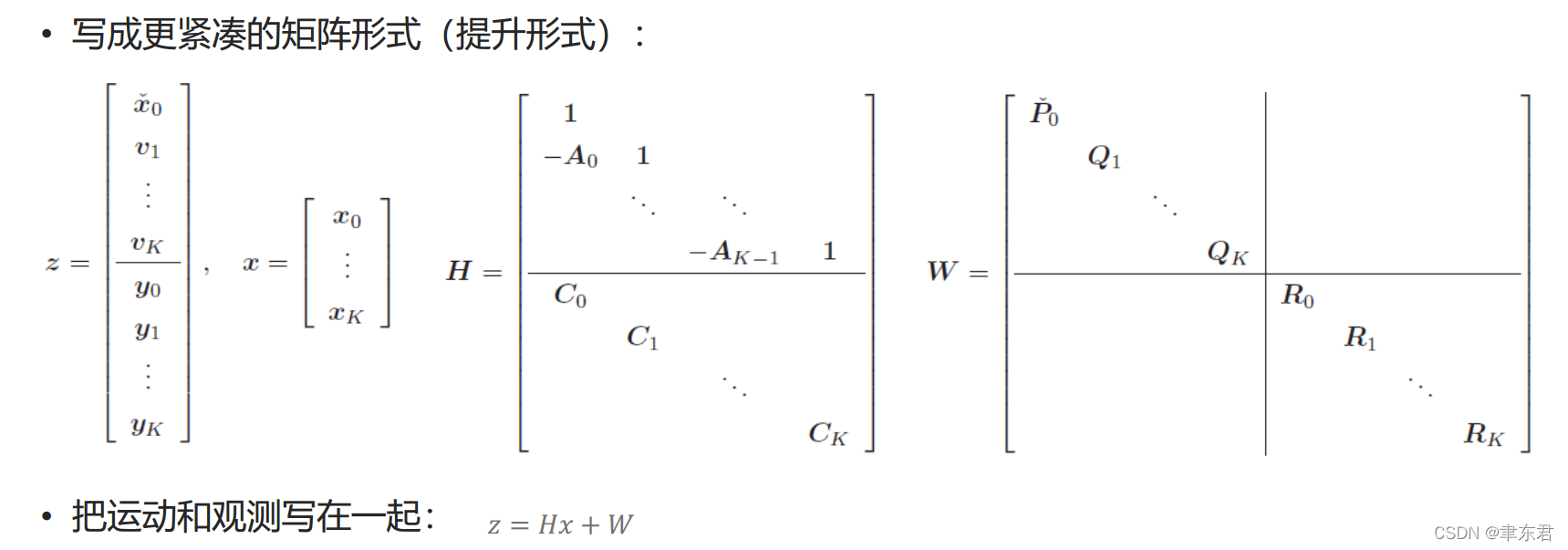
<二> 离散时间的递归平滑算法

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)