流水线自动分拣机器人仿真,vrep与matlab联合仿真,基于机器视觉技术进行自动分拣,采用s...
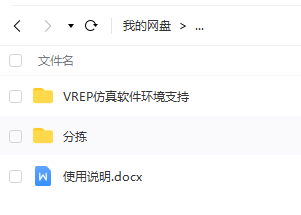
流水线自动分拣机器人仿真,vrep与matlab联合仿真,基于机器视觉技术进行自动分拣,采用scara型机械臂,按照不同的颜色与形状分拣,放入不同的盒子并统计数量。

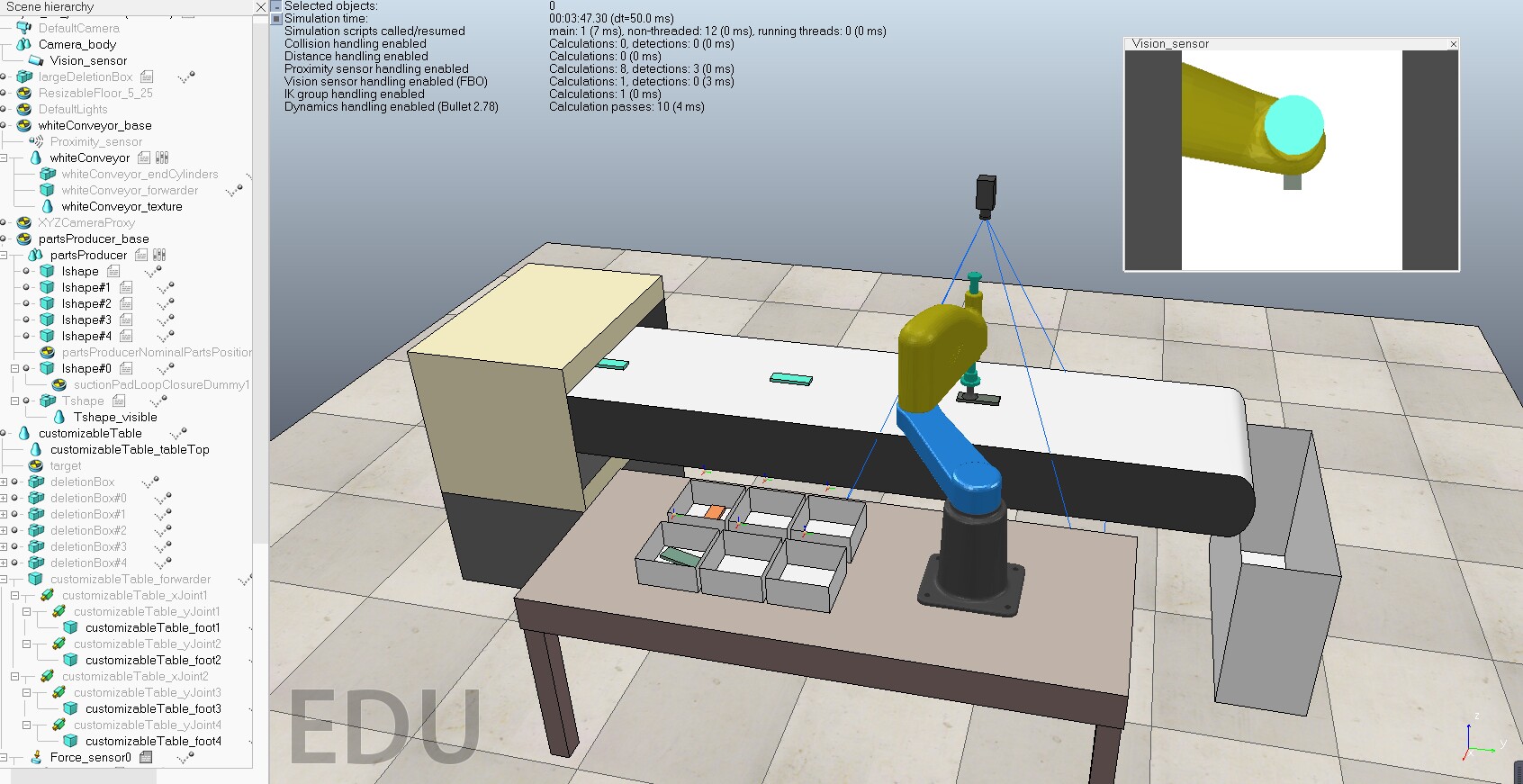
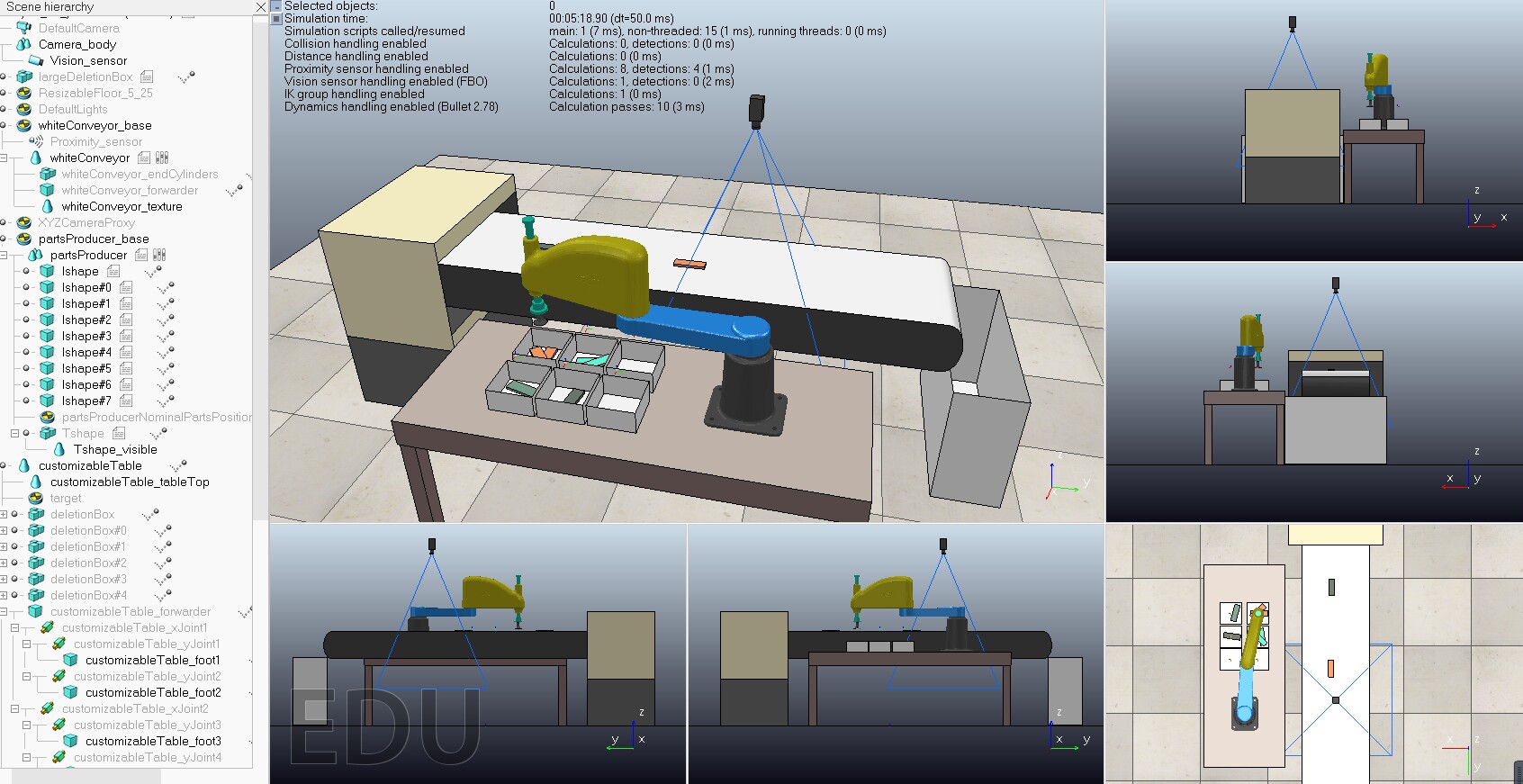
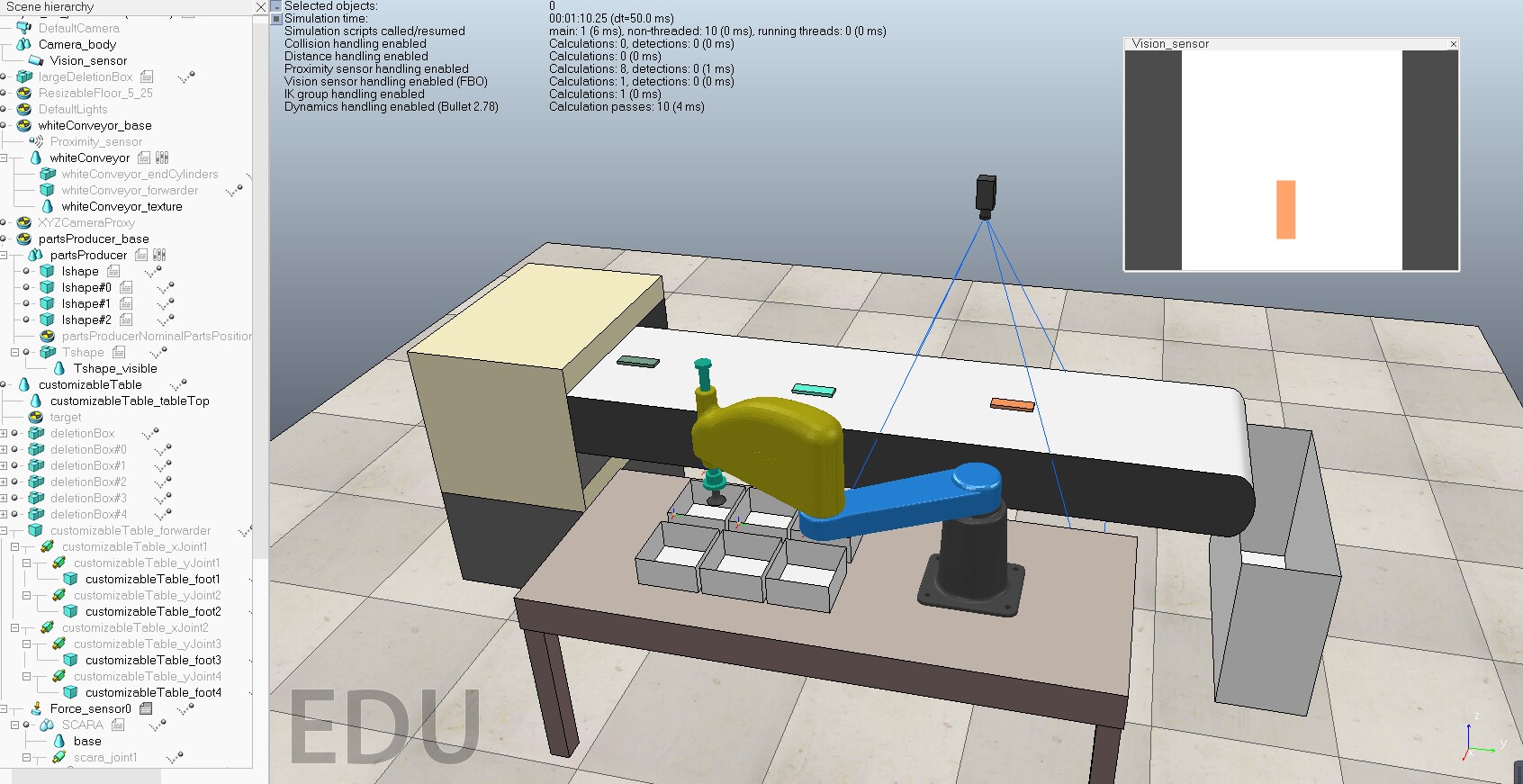
流水线上机械臂挥舞着爪子忙个不停,摄像头镜头在传送带上方闪着微光。这个基于V-REP和Matlab的联合仿真项目,完美复现了工业现场的分拣场景——SCARA机械臂特有的水平快速移动能力,配合视觉识别系统,让物料分拣变得像抓娃娃机一样精准有趣。
视觉识别模块用Matlab的Image Processing Toolbox处理得相当漂亮。当仿真摄像头捕捉到传送带画面后,咱们先来段预处理:
% 工业级美颜三连击
img_gray = rgb2gray(raw_img); % 灰度化
img_eq = histeq(img_gray); % 直方图均衡
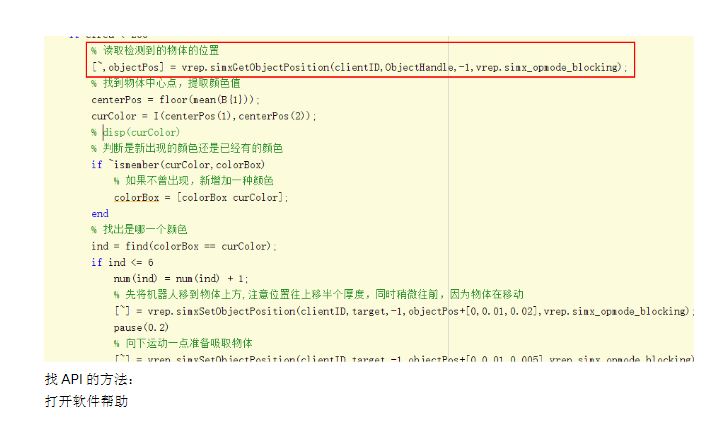
img_denoise = medfilt2(img_eq, [5 5]); % 中值滤波这波操作下来,哪怕是仿真环境里的虚拟噪点也被收拾得服服帖帖。形状识别用regionprops函数提取轮廓特征,颜色识别则直接在HSV空间做阈值分割。当系统检测到红色圆形零件时,控制台会实时蹦出"RedCircleDetected"的提示。
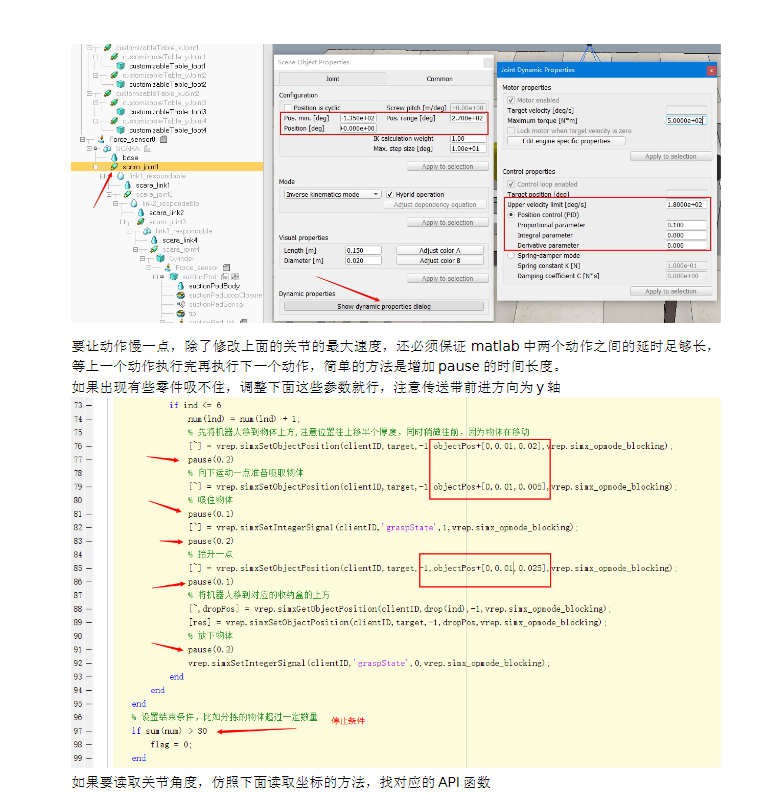
SCARA机械臂的D-H参数配置是灵魂所在。在V-REP里建立四轴模型时,关节参数必须和Matlab控制脚本严丝合缝:
% SCARA机械臂参数配置(单位:米)
L1 = 0.45; % 大臂长度
L2 = 0.35; % 小臂长度
d3 = 0.2; % 垂直运动范围
theta4 = 0; % 末端旋转
% 逆运动学计算函数
function [q1,q2,q3] = inverse_kinematics(x,y,z)
q3 = z; % 垂直方向直接对应
D = (x^2 + y^2 - L1^2 - L2^2)/(2*L1*L2);
q2 = atan2(-sqrt(1-D^2), D);
q1 = atan2(y,x) - atan2(L2*sin(q2), L1+L2*cos(q2));
end这个逆解算法能让机械臂在0.5秒内计算出最优路径,仿真时能看到机械臂划出优雅的圆弧轨迹。调试时发现Z轴升降速度过快会导致虚拟零件被撞飞,后来在Matlab里加了加速度限制才算稳住。
流水线自动分拣机器人仿真,vrep与matlab联合仿真,基于机器视觉技术进行自动分拣,采用scara型机械臂,按照不同的颜色与形状分拣,放入不同的盒子并统计数量。
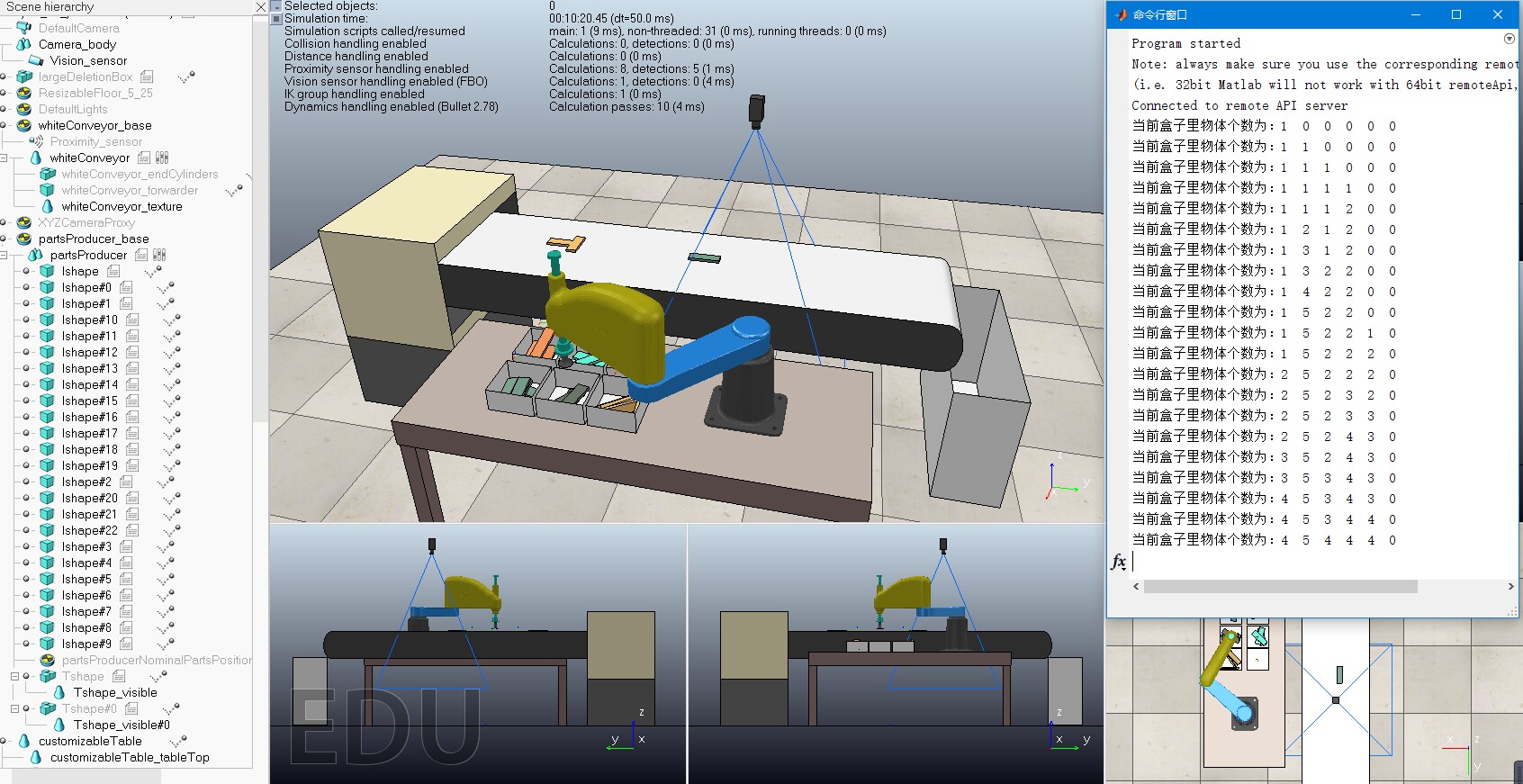
统计模块用全局哈希表玩出新花样。每当机械臂完成一次投递,就会触发这个计数逻辑:
% 使用containers.Map实现分类统计
color_stats = containers.Map({'Red','Blue','Green'}, [0,0,0]);
shape_stats = containers.Map({'Circle','Square','Triangle'}, [0,0,0]);
% 更新统计(示例)
current_color = 'Red';
current_shape = 'Circle';
color_stats(current_color) = color_stats(current_color) + 1;
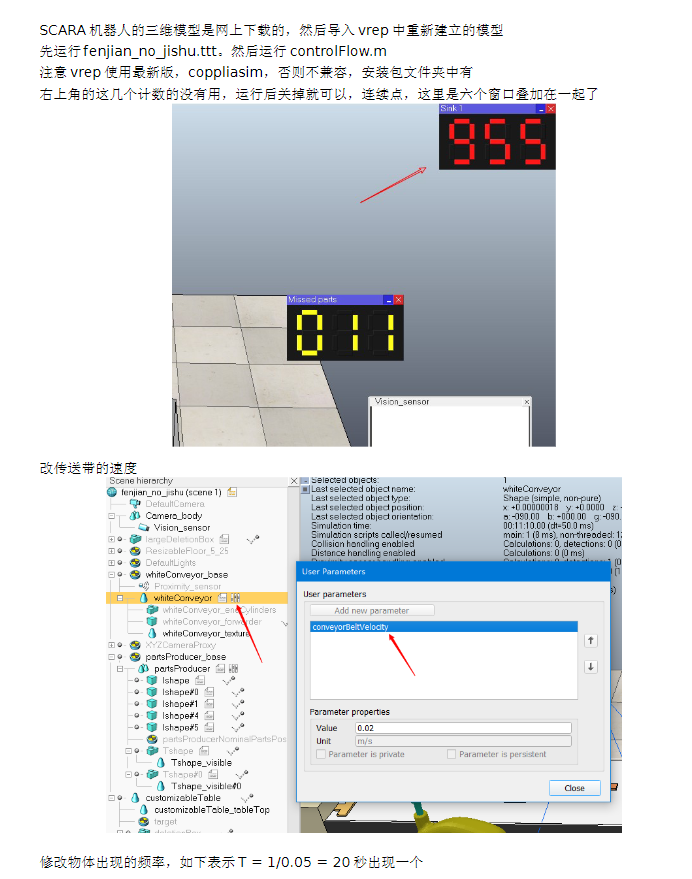
shape_stats(current_shape) = shape_stats(current_shape) + 1;仿真跑上十分钟,各种颜色形状的统计结果就以CSV格式自动存档。有次故意让传送带超速运行,结果视觉系统漏检了三个零件——看来算法鲁棒性还得再调教调教。
联合仿真的精髓在于V-REP和Matlab的远程API对接。下面这段代码就像机械臂的中枢神经:
vrep=remApi('remoteApi'); % 创建API对象
clientID=vrep.simxStart('127.0.0.1',19997,true,true,5000,5);
% 获取机械臂关节句柄
[~, joint1] = vrep.simxGetObjectHandle(clientID, 'SCARA_joint1', vrep.simx_opmode_blocking);
% 类似代码获取其他关节句柄...
% 控制关节运动
vrep.simxSetJointTargetPosition(clientID, joint1, q1, vrep.simx_opmode_streaming);调试时最抓狂的是坐标系转换问题,V-REP的Z轴朝上而Matlab默认Y轴朝上,好几个小时都在和正负号较劲。后来在代码里加了坐标系转换矩阵才解决这个"维度穿越"的bug。
(注:代码示例中的V-REP远程API调用需要配合仿真场景中的具体对象命名,实际开发时需要先用V-REP的脚本功能初始化通信端口)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 7
7 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)