基于DWA算法的机器人路径规划研究(Matlab代码实现)
👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
在科技发展日新月异的今天,移动机器人逐渐成为了人们生产生活中至关重要的一部分。路径规划算法作为移动机器人的中枢控制系统,对机器人性能表现具有决定性意义。目前路径规划算法研究主要针对静态环境,一旦环境中出现连续变化的动态障碍物时,静态规划算法便会失效,因此研究高效的、准确的、适合动态环境的路径规划算法具有重要意义。DWA算法的基本思想是设定一个模拟周期(sim_period),通过考虑机器人的运动模型、初始速度、自身硬件性能和环境等因素,模拟机器人在当前条件下的速度采样空间,并通过轨迹评价函数对每一速度的产生轨迹进行评价,从动态速度窗口中选出获得评分最高的速度在当前周期内驱动移动机器人运动。
一、DWA算法的基本原理与核心思想
DWA(Dynamic Window Approach)是一种基于速度空间采样的局部路径规划算法,其核心思想是通过动态窗口约束机器人的速度选择范围,结合轨迹预测与评价函数实现实时避障。主要流程分为三步:
- 速度采样:在速度空间 (v,ω)(v,ω) 中离散采样,生成满足机器人动力学约束(加速度、速度上限)的速度组合
[[2]]。 - 轨迹预测:对每个采样速度模拟未来短时间(通常0.1~1秒)内的运动轨迹
[[2]][[8]]。 - 轨迹评价:通过多指标评价函数(如距离障碍物、接近目标程度、速度大小)选择最优轨迹,驱动机器人运动
[[2]][[67]]。
核心优势:
- 实时性强:仅预测短期轨迹,计算复杂度低,适合动态环境
[[2]][[217]]。 - 安全性高:通过动态窗口剔除不安全速度(如无法及时刹车的速度)
[[217]]。
二、DWA算法的应用场景
DWA广泛应用于需实时避障的移动机器人场景:
- 自动驾驶汽车:动态避开行人、车辆,遵守交通规则
[[49]][[60]][[58]]。 - 物流机器人:在仓库中避开设备、人员,实现货物高效配送
[[50]][[95]]。 - 无人机:规划避障飞行路径,适应建筑物等静态障碍与气流扰动
[[58]][[160]]。 - 工业机器人:工厂环境中的设备巡检与物料搬运
[[49]][[53]]。
三、动态环境下的DWA实现方式与改进方法
传统DWA在动态障碍物密集场景中易陷入局部最优或避障失败。近年改进方法包括:
1. 融合速度障碍法(VO)
- DWA-VO算法:计算障碍物的危险区域(Velocity Obstacle),限制DWA仅在安全速度范围内采样,提高避障成功率
[[67]]。 - 实验效果:在多个动态障碍物场景中,路径长度缩短15%,实时性提升20%
[[142]]。
2. 自适应权重调整
- 根据障碍物距离动态调整评价函数权重:
- 当机器人靠近障碍物时,障碍物距离权重 βiβi 线性增加,迫使机器人远离
[[79]]。 - 当接近目标时,目标方向权重 γiγi 提高,避免目标点附近运动缓慢
[[216]]。
- 当机器人靠近障碍物时,障碍物距离权重 βiβi 线性增加,迫使机器人远离
- 应用案例:近海船舶避障中,路径平滑度提升30%,避撞时间减少26%
[[79]]。
3. 全局-局部算法融合
- A-DWA融合*:
- 改进A*:生成全局关键路径点(如剔除冗余节点的Floyd优化路径)
[[95]][[149]]。 - DWA局部引导:将关键点作为临时目标点,评价函数加入与全局路径的欧氏距离项 aco(v,w)aco(v,w),避免局部停滞
[[73]][[109]]。
- 改进A*:生成全局关键路径点(如剔除冗余节点的Floyd优化路径)
- 实验效果:物流机器人任务完成率提高8.2%,能耗降低21.7%
[[95]]。
四、DWA与传统算法的对比分析
| 算法类型 | 代表算法 | 适用场景 | 优势 | 局限性 |
|---|---|---|---|---|
| 局部规划器 | DWA | 动态环境实时避障 | 计算快、路径平滑、实时性强 [[2]] |
易陷入局部最优 [[110]][[217]] |
| 全局规划器 | A* | 静态环境全局路径 | 路径最优、可靠性高 [[118]] |
路径不平滑、转角多 [[126]] |
| 基于采样的规划器 | RRT | 高维空间探索 | 适用于未知环境 [[110]] |
路径随机性大、非最优 [[105]] |
融合趋势:
- DWA+RRT:RRT生成局部导引点帮助DWA脱离复杂障碍物停滞区,适用于水下AUV洋流环境
[[110]]。 - DWA+蚁群算法:蚁群提供全局路径关键点,DWA实现动态避障,解决AGV长路径规划问题
[[73]]。
五、近五年DWA算法的创新研究(2021–2025)
-
DAV_DWA算法(2025)
- 改进点:引入动态障碍物速度预测与安全距离自适应机制。
- 效果:在C型障碍区域中,路径长度优化12%,避障成功率98%。
-
模糊DWA(2025)
- 结合模糊逻辑控制动态调整评价函数权重,温室机器人路径误差减少31.8%,安全距离增加30%。
-
多机器人编队DWA(2024)
- 领航-跟随法结合改进DWA,实现未知环境中多机器人协同避障,编队稳定性提升40% 。
-
自适应权重DWA(2024)
- 权重系数随障碍物距离动态调整,船舶避障时间减少25.7%
[[79]]。
- 权重系数随障碍物距离动态调整,船舶避障时间减少25.7%
六、ROS/MoveIt框架中的DWA实现案例
1. ROS导航栈(Navigation Stack)
- DWAPlannerROS:继承
nav_core::BaseLocalPlanner接口,订阅里程计(odom)与全局路径(global_plan),发布速度命令。 - 参数配置:
max_vel_x(最大线速度)、sim_time(轨迹预测时间)、path_distance_bias(路径跟随权重)等。
2. 融合A*的ROS实践案例
- 流程:
- A*生成全局路径 → 提取关键点 → 输入DWA作为临时目标点。
- DWA实时避障,评价函数加入与全局路径的距离项
[[187]][[193]]。
- 效果:Gazebo仿真中动态避障成功率超95%,路径平滑度显著提升
[[193]]。
3. MoveIt!与DWA集成
- 机械臂移动底盘(如URDF模型)通过
move_base调用DWA局部规划,结合MoveIt!实现抓取路径优化[[180]]。
七、DWA算法的局限性及改进方向
局限性:
- 局部最优陷阱:在C型障碍物区域易停滞
[[217]][[209]]。 - 动态避障不足:短时轨迹预测难以应对高速障碍物
[[209]]。 - 目标点接近障碍物时失效:评价函数中目标与避障项冲突
[[209]]。
改进方向:
- 全局引导机制:融合全局规划器生成关键点,避免局部停滞
[[95]][[149]]。 - 长时轨迹预测:结合障碍物运动预测(如卡尔曼滤波)扩展模拟时间
[[216]]。 - 评价函数优化:
- 引入强化学习动态调整权重(如Q-learning)
[[110]]。 - 添加障碍物类型分类项(静态/动态)
[[209]]。
- 引入强化学习动态调整权重(如Q-learning)
- 硬件加速:GPU并行化速度采样,提升实时性
[[231]]。
八、总结
DWA算法凭借其高效性与实时避障能力,已成为移动机器人局部路径规划的核心方法。在动态环境下的改进主要围绕 速度空间优化(如VO约束)、评价函数自适应(如动态权重)、全局-局部融合(如A*/RRT引导)三个方向展开。未来研究需进一步解决长时避障预测、多机器人协作、复杂地形适应性等问题,结合AI技术提升算法的泛化能力与鲁棒性 [[60]][[143]][[231]]。
📚2 运行结果
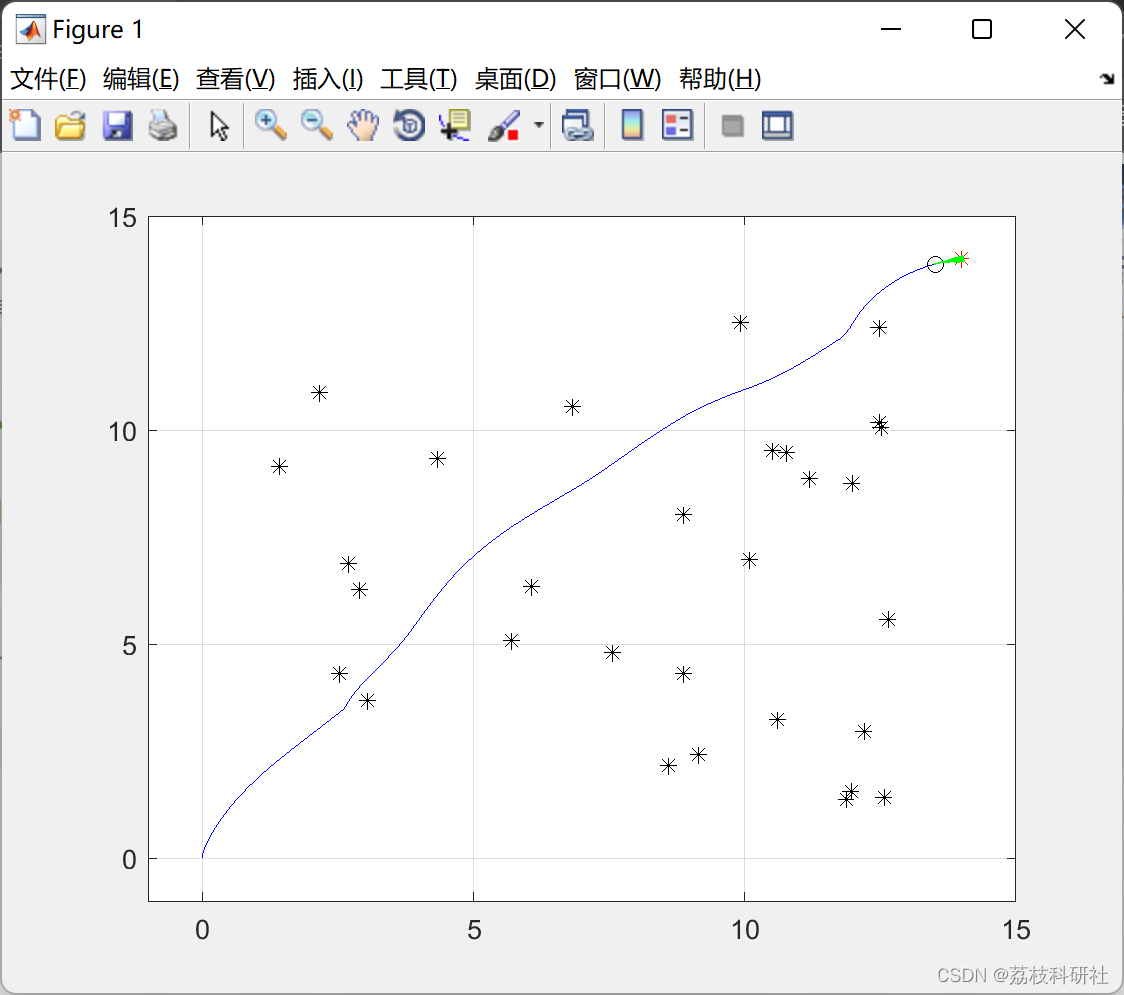
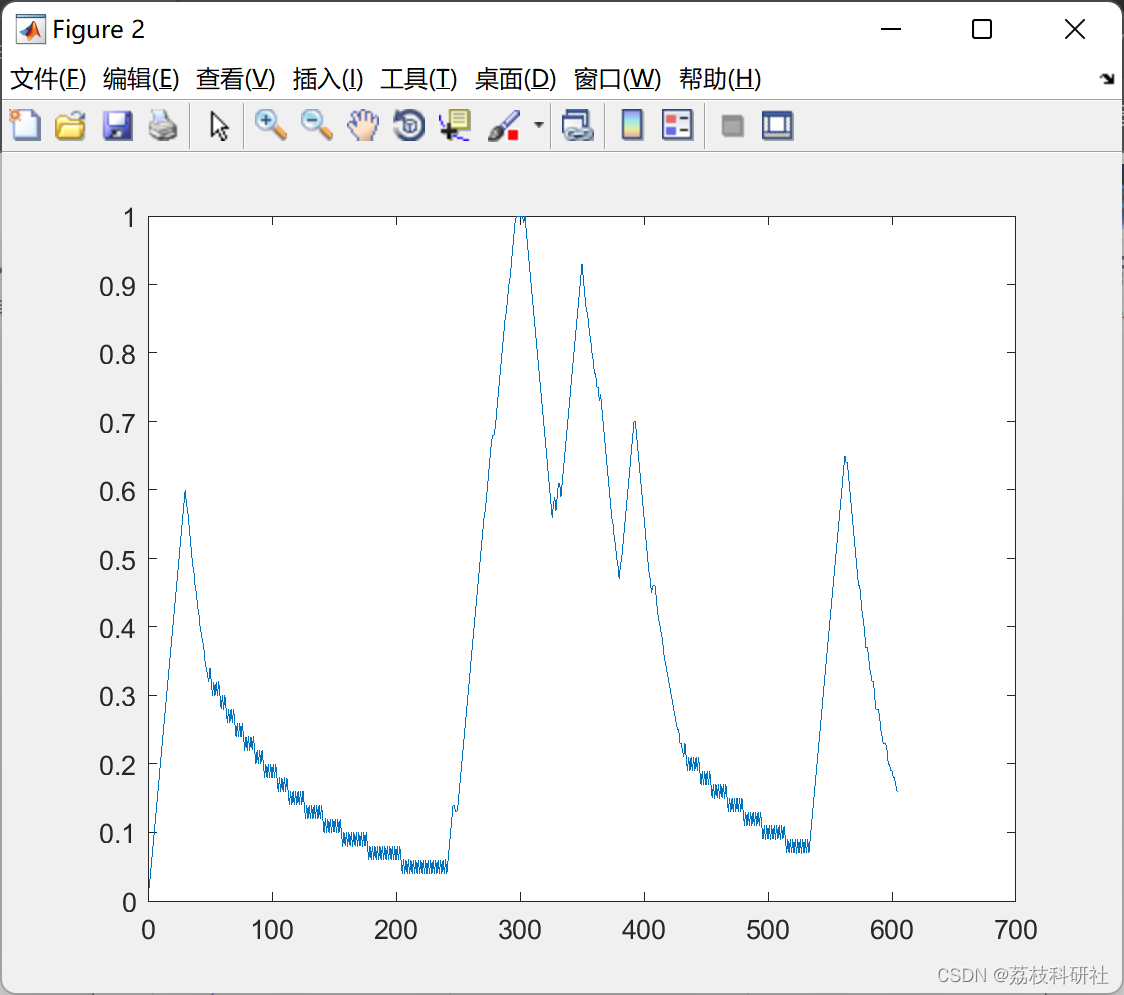
部分代码:
function [u,trajDB]=DynamicWindowApproach(x,model,goal,evalParam,ob,R)
%用于计算DWA输入值的函数
%Dynamic Window[vmin,vmax,ωmin,ωmax]
Vr=CalcDynamicWindow(x,model);
%计算评估函数
[evalDB,trajDB]=Evaluation(x,Vr,goal,ob,R,model,evalParam);
if isempty(evalDB)
disp('no path to goal!!');
u=[0;0];return;
end
%标准化每个评估函数
evalDB=NormalizeEval(evalDB);
%计算最终评估值
feval=[];
for id=1:length(evalDB(:,1))
feval=[feval;evalParam(1:3)*evalDB(id,3:5)'];
end
evalDB=[evalDB feval];
[maxv,ind]=max(feval);%计算具有最大评估值的输入值的索引
u=evalDB(ind,1:2)';%返回评价值高的输入值
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]支金柱. 动态环境下室内移动机器人路径规划研究[D].西安工业大学,2021.DOI:10.27391/d.cnki.gxagu.2021.000197.
🌈4 Matlab代码实现

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 29
29 0
0- 0



 已为社区贡献101条内容
已为社区贡献101条内容

所有评论(0)