FPGA 实现运动目标检测:从视频流到实时反馈
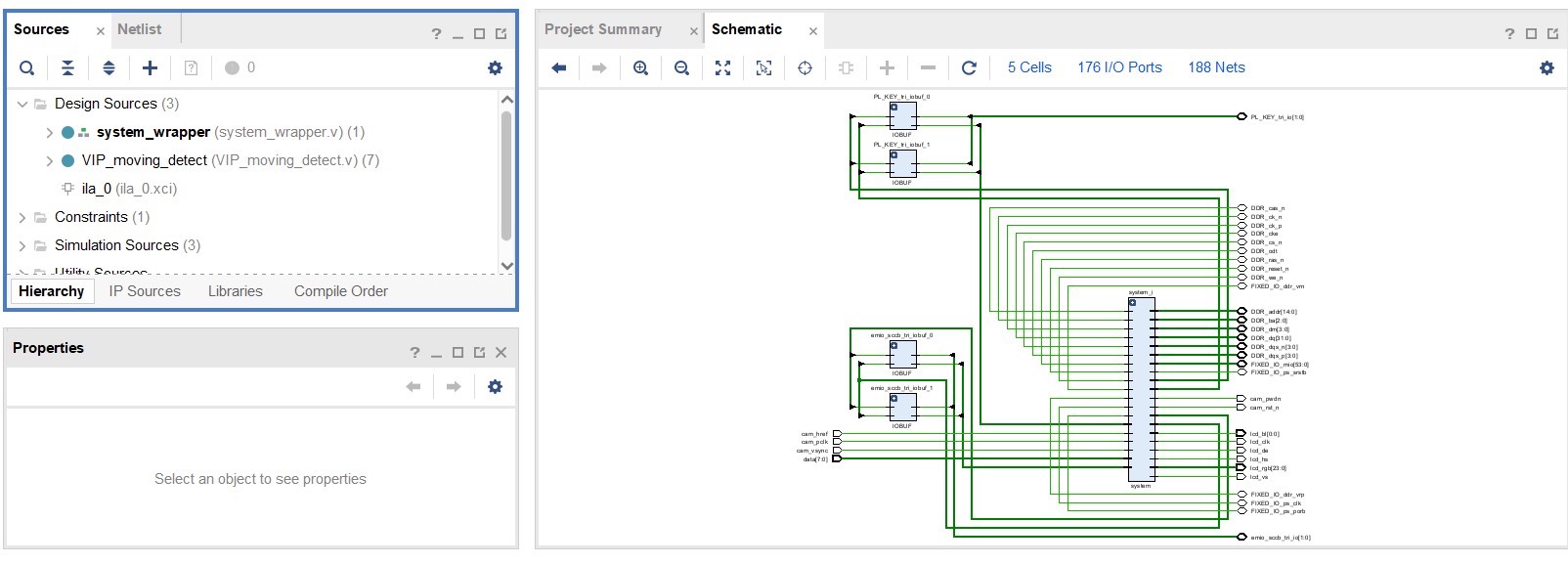
FPGA 运动目标检测 将摄像头采集的彩色视频流转换为灰度视频流并进行图像处理来实现运动目标检测,并将检测后的结果与原彩色视频流叠加来显示实时检测结果。
在数字图像处理和计算机视觉领域,运动目标检测是一个基础且关键的技术。今天咱们就来唠唠如何借助 FPGA 实现通过摄像头采集彩色视频流,把它转化为灰度视频流,完成图像处理并实现运动目标检测,最后还能将检测结果与原彩色视频流叠加显示实时效果。
彩色到灰度的视频流转换
要对视频流里的运动目标进行检测,第一步往往是把彩色视频流转化为灰度视频流。为啥呢?因为灰度图处理起来更简单,计算量小,能更高效地实现后续的检测。
在 FPGA 上实现这个转换,代码可以像这样(以 Verilog 为例):
module rgb_to_gray (
input wire [7:0] red,
input wire [7:0] green,
input wire [7:0] blue,
output reg [7:0] gray
);
always @(*) begin
gray = (red * 299 + green * 587 + blue * 114) / 1000;
end
endmodule这段代码很直观,rgbtogray 模块接收红(red)、绿(green)、蓝(blue)三个颜色通道的 8 位数据,通过经典的灰度转换公式 Y = 0.299R + 0.587G + 0.114B 来计算灰度值。这里用整数运算 (red 299 + green 587 + blue * 114) / 1000 来近似实现这个公式,结果赋给 gray 输出。
图像处理与运动目标检测
完成灰度转换后,就可以对灰度视频流进行图像处理实现运动目标检测啦。常见的方法有帧差法,它通过对比连续两帧图像的差异来检测运动目标。
下面这段简单的伪代码描述一下帧差法的核心逻辑:
# 假设 frame1 和 frame2 是连续两帧的灰度图像
frame1 = get_frame()
frame2 = get_frame()
diff = abs(frame1 - frame2)
# 设置一个阈值,过滤掉小的差异
threshold = 30
for i in range(len(diff)):
for j in range(len(diff[0])):
if diff[i][j] > threshold:
diff[i][j] = 255
else:
diff[i][j] = 0
# diff 图像中值为 255 的地方就是检测到的运动目标区域在 FPGA 上实现帧差法会稍微复杂些,要处理数据的缓存来存储相邻帧的数据,并且逐像素进行差值计算和阈值比较。大概的 Verilog 模块框架可能像这样:
module frame_difference (
input wire clk,
input wire rst,
input wire [7:0] current_pixel,
input wire new_frame,
output reg [7:0] diff_pixel
);
reg [7:0] prev_pixel;
always @(posedge clk or posedge rst) begin
if (rst) begin
prev_pixel <= 8'b0;
end else if (new_frame) begin
prev_pixel <= current_pixel;
end else begin
diff_pixel = abs(current_pixel - prev_pixel);
if (diff_pixel > 8'd30) begin
diff_pixel = 8'd255;
end else begin
diff_pixel = 8'd0;
end
prev_pixel <= current_pixel;
end
end
endmodule这里 framedifference 模块接收时钟信号 clk、复位信号 rst、当前像素 currentpixel 和新帧信号 new_frame。当复位信号有效时,清除上一帧像素值。有新帧到来时,保存当前像素作为上一帧像素。在正常处理过程中,计算当前像素与上一帧像素的差值,和阈值比较后输出差异像素值。
检测结果与原彩色视频流叠加
最后一步,是把检测到的运动目标结果叠加到原彩色视频流上,让我们能直观看到检测效果。这就好比给原视频加上了一个运动目标的“标注”。
在 FPGA 上实现这个叠加,思路是根据检测到的运动目标区域(在灰度图中对应值为 255 的像素区域),在彩色视频流对应的位置进行一些特殊处理,比如改变颜色或者加上边框。以下是一个简单的 Verilog 模块思路代码:
module overlay_result (
input wire [7:0] red,
input wire [7:0] green,
input wire [7:0] blue,
input wire [7:0] detected_gray,
output reg [7:0] new_red,
output reg [7:0] new_green,
output reg [7:0] new_blue
);
always @(*) begin
if (detected_gray == 8'd255) begin
new_red = 8'd255;
new_green = 8'd0;
new_blue = 8'd0;
end else begin
new_red = red;
new_green = green;
new_blue = blue;
end
end
endmodule这个 overlayresult 模块接收原彩色视频流的红、绿、蓝像素值,以及检测后的灰度像素值 detectedgray。如果检测到运动目标(即 detected_gray 为 255),就把该像素位置的颜色改成红色(红 255,绿 0,蓝 0),否则保持原彩色像素值不变。
通过以上几个步骤,我们就能在 FPGA 上完成从摄像头采集彩色视频流,实现运动目标检测,并将检测结果实时叠加显示的完整过程啦。当然,实际应用中还会涉及到很多细节优化,比如数据的高速传输、存储管理等,但这个基本框架可以帮助我们快速上手 FPGA 的运动目标检测开发。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 21
21 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)