【YOLO数据集】无人机视角目标检测
📥 1、背景
无人机航拍视角下的实时目标检测是计算机视觉领域的前沿课题,在城市规划、农业监测、灾害评估、边境巡防及影视制作等众多领域展现出巨大应用潜力。然而,无人机从空中俯视获取的影像与传统地面或固定监控视角存在本质差异:目标物体(如车辆、行人、建筑)通常呈现尺度极小、分布随机、视角独特且背景复杂多变的特点,同时无人机高速飞行和悬停引起的运动模糊、图像畸变及光照剧烈变化,进一步加剧了检测难度。这使得许多为常规视角设计的高性能检测模型直接迁移后性能显著下降。以YOLO为代表的单阶段实时检测框架,凭借其出色的速度与精度平衡,成为无人机机载平台边缘计算的首选方案之一。因此,研究面向无人机视角特性优化的YOLO检测算法,旨在提升模型对微小目标、密集目标和动态背景的鲁棒性,对于实现无人机的自主环境感知与智能决策具有关键的理论意义和实际价值。
📌 2、数据集概览
| 项目 | 内容 |
|---|---|
| 数据集名称 | 无人机视角目标检测数据集 |
| 任务类型 | 目标检测(Object Detection) |
| 类别 | 0: pedestrian 1: people 2: bicycle 3: car 4: van 5: truck 6: tricycle 7: awning-tricycle 8: bus 9: motor |
| 标注格式 | YOLO TXT 格式(<类别> <中心x> <中心y> <宽度> <高度>,坐标和尺寸均为相对于图像宽高的归一化值(0-1)) |
| 图片总数 | 8629 |
| 标注总数 | 457066 |
🗂 3、数据详情
| 类别ID | 类别名称 | 图片数量 | 标注数量 |
|---|---|---|---|
| 0 | pedestrian | 7083 | 109187 |
| 1 | people | 5226 | 38560 |
| 2 | bicycle | 3496 | 13069 |
| 3 | car | 8178 | 187005 |
| 4 | van | 6537 | 32702 |
| 5 | truck | 4567 | 16284 |
| 6 | tricycle | 2270 | 6387 |
| 7 | awning-tricycle | 1604 | 4377 |
| 8 | bus | 2992 | 9117 |
| 9 | motor | 5516 | 40378 |
| 总计 | - | 8629 | 457066 |
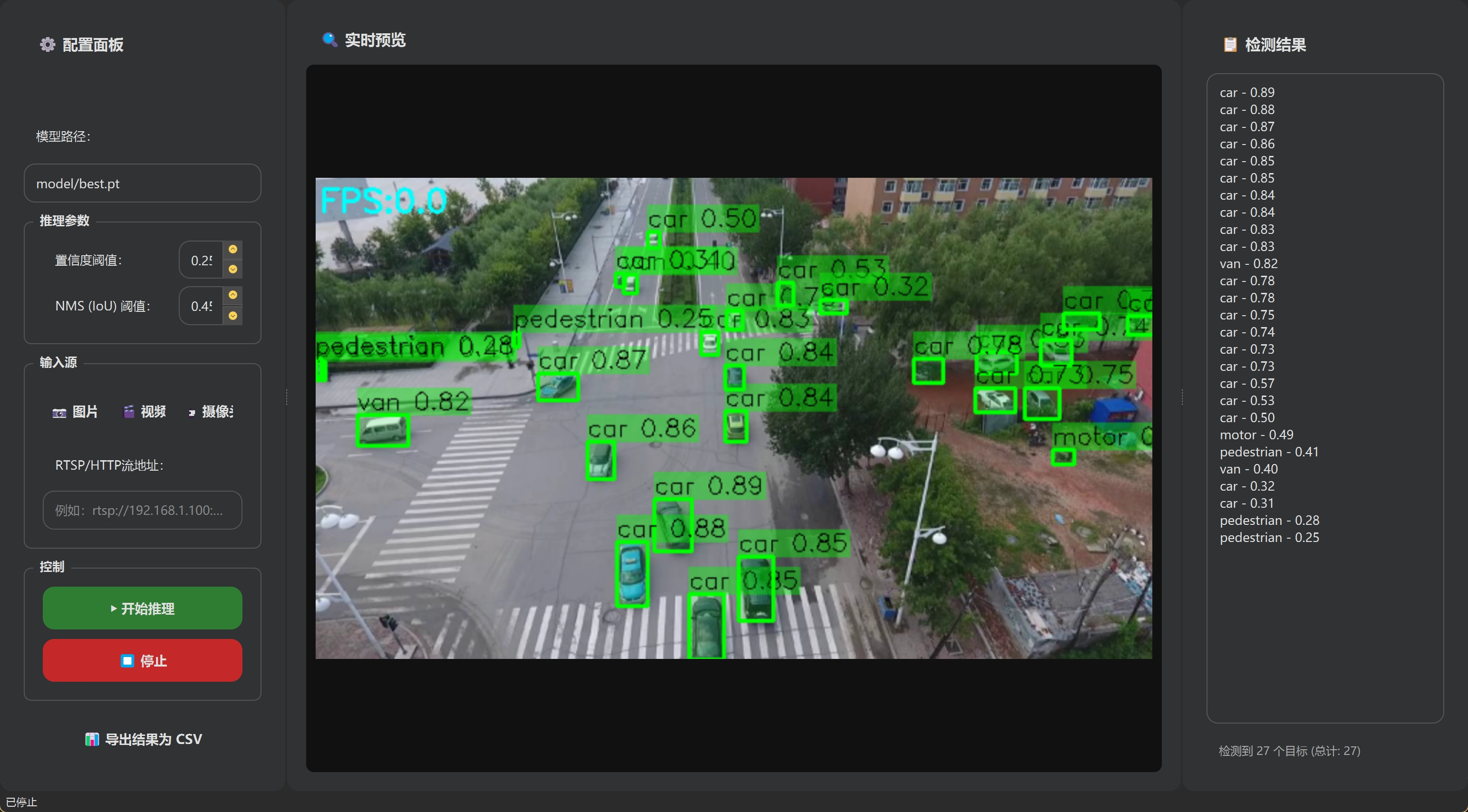
✨ 4、效果演示
🧠 5、模型训练
1、安装miniconda
地址: https://repo.anaconda.com/miniconda/Miniconda3-latest-Windows-x86_64.exe
环境变量(根据实际的安装目录配置):
C:\ProgramData\miniconda3
C:\ProgramData\miniconda3\Scripts
C:\ProgramData\miniconda3\Library\bin
2、创建虚拟环境
conda create -n yolo python==3.8
# 查看现有环境
conda env list
# 激活环境
conda activate yolo
# 激活失败 (执行该命令后重新进入cmd)
conda init cmd.exe
3、源码下载
https://github.com/ultralytics/ultralytics
(注意:不同版本的yolo在不同tag)
4、训练脚本
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLO
if __name__ == '__main__':
model = YOLO('ultralytics/cfg/models/v8/yolov8n.pt') # 指定YOLO模型对象,并加载指定配置文件中的模型配置
# model.load('yolov8s.pt') #加载预训练的权重文件'yolov8s.pt',加速训练并提升模型性能
model.train(data='ultralytics/cfg/datasets/data36.yaml', # 指定训练数据集的配置文件路径,这个.yaml文件包含了数据集的路径和类别信息
cache=False, # 是否缓存数据集以加快后续训练速度,False表示不缓存
imgsz=640, # 指定训练时使用的图像尺寸,640表示将输入图像调整为640x640像素
epochs=100, # 设置训练的总轮数为200轮
batch=8, # 设置每个训练批次的大小为16,即每次更新模型时使用16张图片
close_mosaic=0, # 设置在训练结束前多少轮关闭 Mosaic 数据增强,10 表示在训练的最后 10 轮中关闭 Mosaic workers=16, # 设置用于数据加载的线程数为8,更多线程可以加快数据加载速度
patience=300, # 在训练时,如果经过50轮性能没有提升,则停止训练(早停机制)
device='0', # 指定使用的设备,'0'表示使用第一块GPU进行训练
optimizer='SGD', # 设置优化器为SGD(随机梯度下降),用于模型参数更新
)
5、配置文件 data.yaml
path: E:/data/yoloTrain/uav
test: test/images # test images
train: train/images # train images
val: val/images # val images
names:
0: pedestrian
1: people
2: bicycle
3: car
4: van
5: truck
6: tricycle
7: awning-tricycle
8: bus
9: motor
🛠 6、配套服务
我们提供一站式视觉解决方案,包括:
- 模型训练与调优指导
- 部署环境远程配置
- 定制标注与数据增强
- 毕业设计/课题辅导
- 企业项目合作开发
❓ 7、常见问题
Q:标注格式如何转换?
A:提供Python转换脚本,支持YOLO→VOC/COCO,开箱即用:点击下载转换脚本

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 46
46 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)