《ROS 2 机器人开发:从入门到实践》学习篇:二
目录
前言
本篇主要介绍ROS 2基本学习环境的认识以及下载,长文章制作不易,希望读者多多支持。
一、Linux系统
Linux作为开源免费的操作系统,凭借其开放生态吸引了全球开发者与企业参与贡献。根据统计,全球科技巨头每年向Linux内核提交的代码量已成为衡量其技术实力的关键指标。经过三十年发展,Linux已成长为支持多用户的高性能操作系统,更是机器人开发框架ROS2的首选平台——尽管ROS2兼容Windows/MacOS,但其核心功能在Linux环境下表现最优,因此我们学习主要将以Linux为操作基础展开。
需要特别说明的是,我们日常使用的"Linux系统"实际上是不同发行版的组合。严格意义上的Linux仅指操作系统内核,而发行版(如Ubuntu、Fedora等)则是将内核与图形界面、应用软件整合形成的完整系统。
二、Ubuntu系统
1.Ubuntu系统简介
Ubuntu系统就是上面我们所说的将Linux内核与图形界面、应用软件整合形成的完整系统。具有可视化的图形界面以及我们常用的浏览器,文件编辑器,通讯软件等。
2.Ubuntu虚拟机安装
虚拟机是一个软件,可以在已有系统之上,构建另外一个虚拟的系统,让多个操作环境同时进行。
这里我们采用的虚拟机软件叫做VirtualBox。
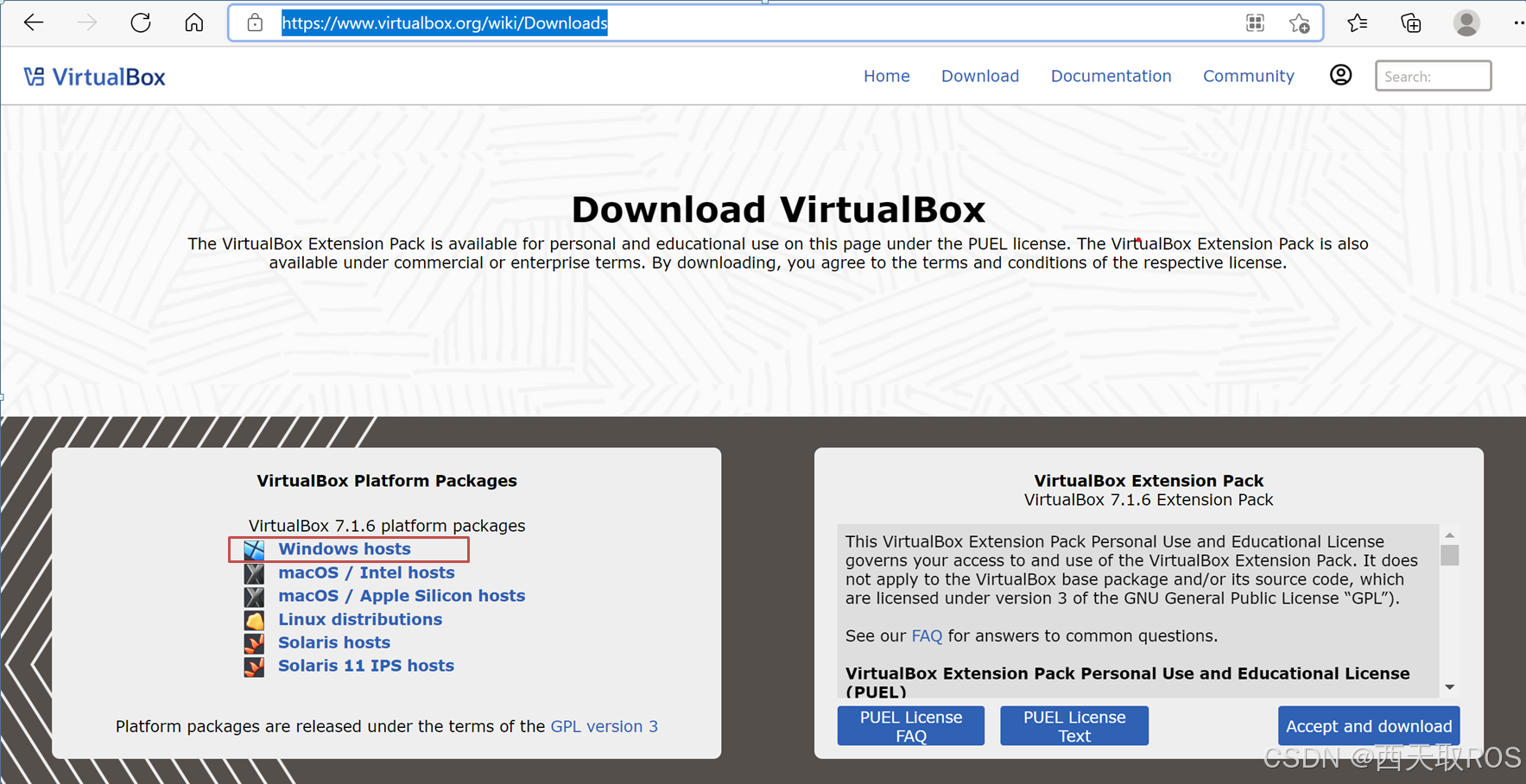
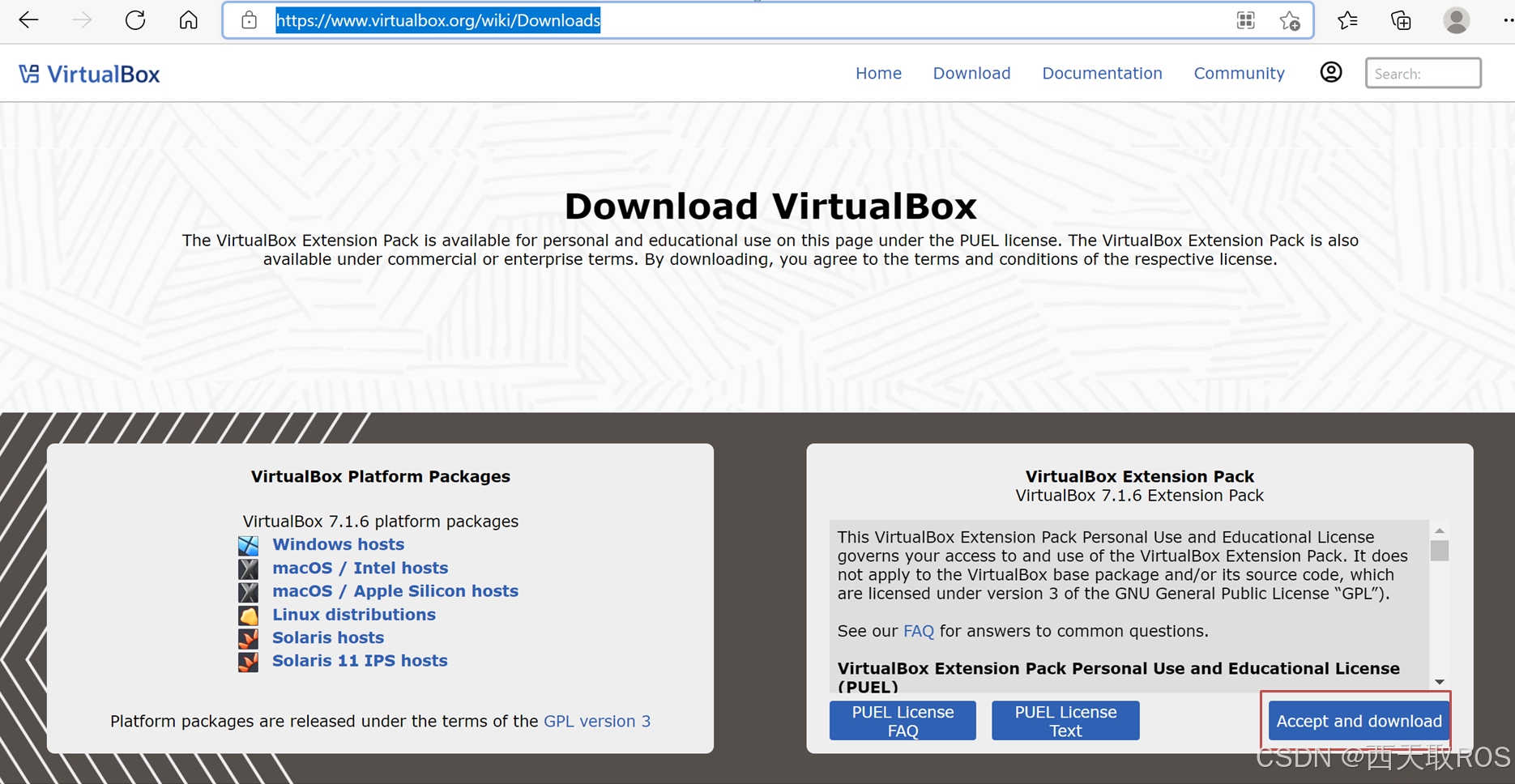
1)首先根据地址https://www.virtualbox.org/wiki/Downloads进入到VirtualBox官网的Downloads界面:点击 Windows hosts即可下载VirtualBox软件,然后点击Accept and download 下载扩展。
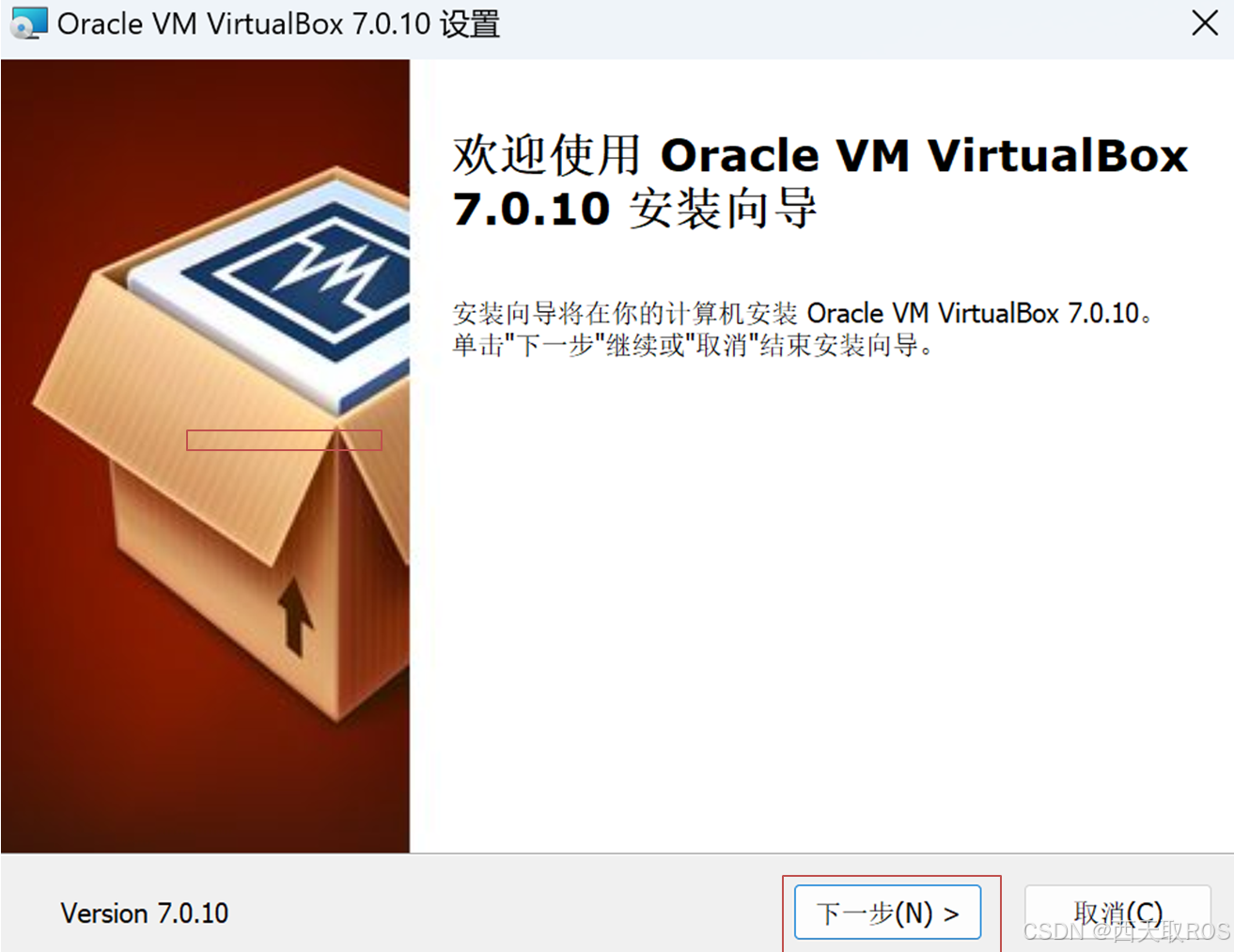
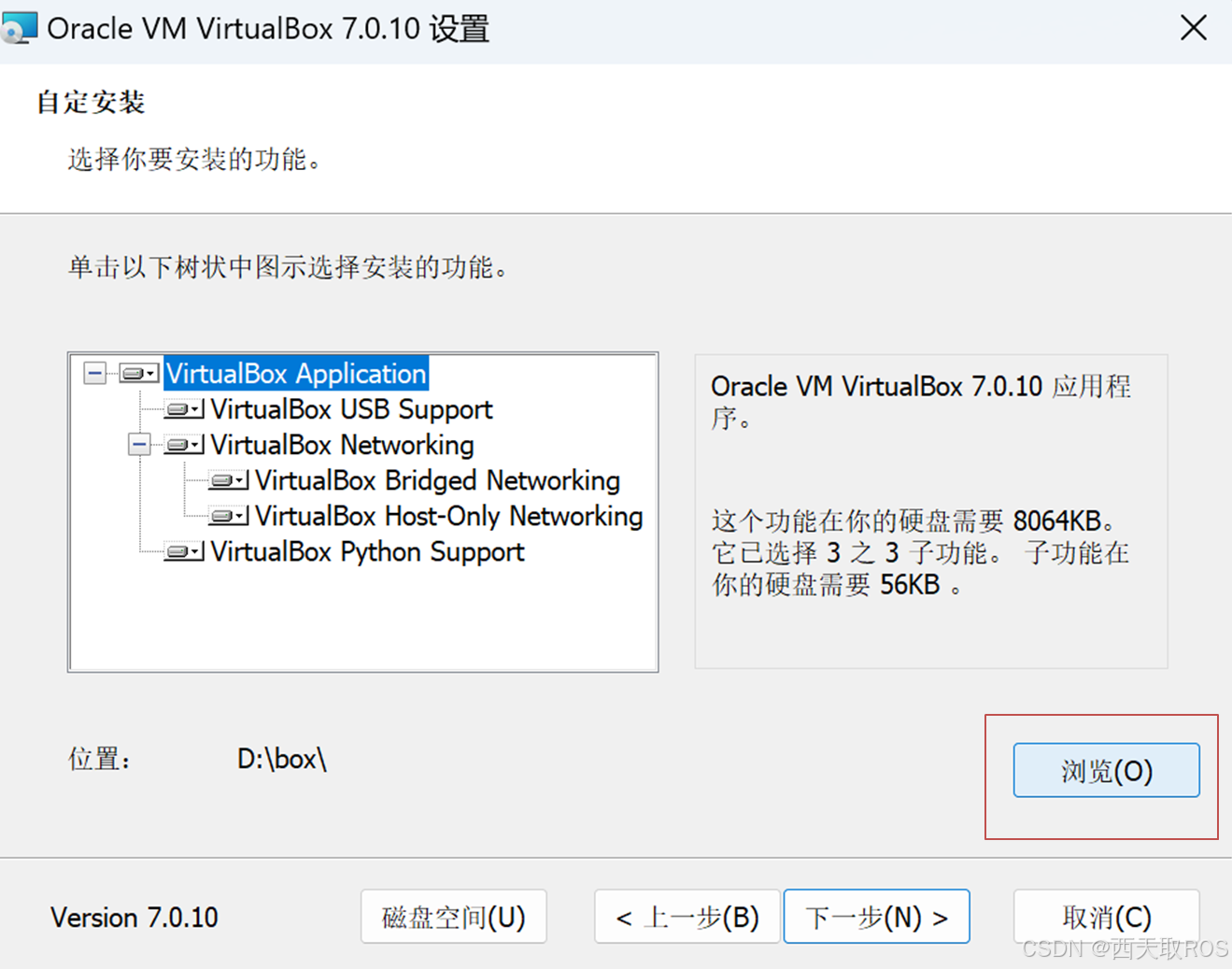
2)打开安装包,依次点击下一步,点击浏览选择你想要安装的位置,建议安装在D/E盘。
3)依次点击 是->安装
3.Ubuntu系统镜像下载
Ubuntu镜像是指存储在远程服务器上的Ubuntu操作系统映像文件,用于下载和安装Ubuntu系统。这些镜像通常由官方或第三方提供,以确保用户可以快速。稳定地获取所需的软件包和更新。
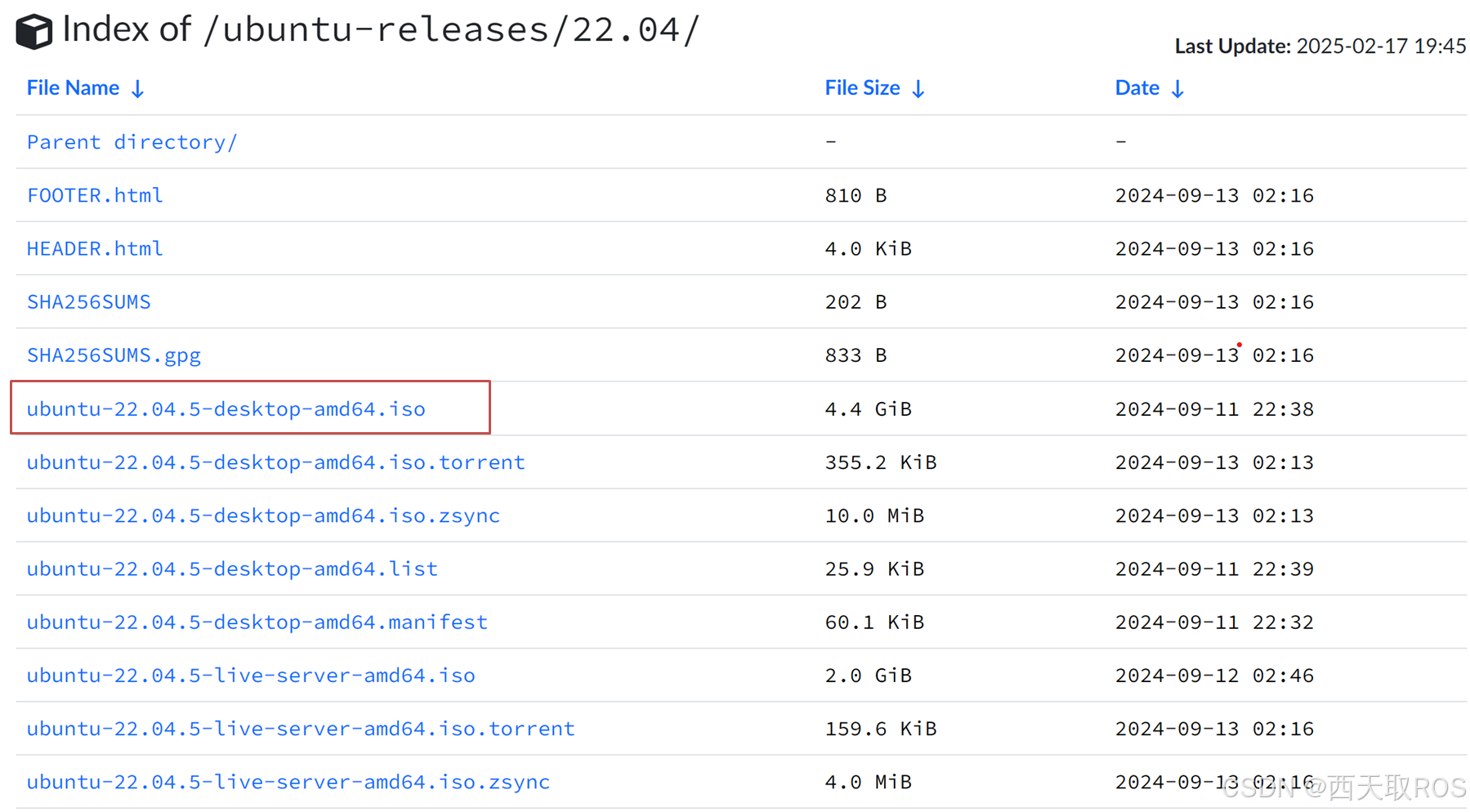
通过https://mirrors.tuna.tsinghua.edu.cn/ubuntu-releases/22.04/链接下载ubuntu镜像文件,选择amd64版本。
4.新建虚拟机
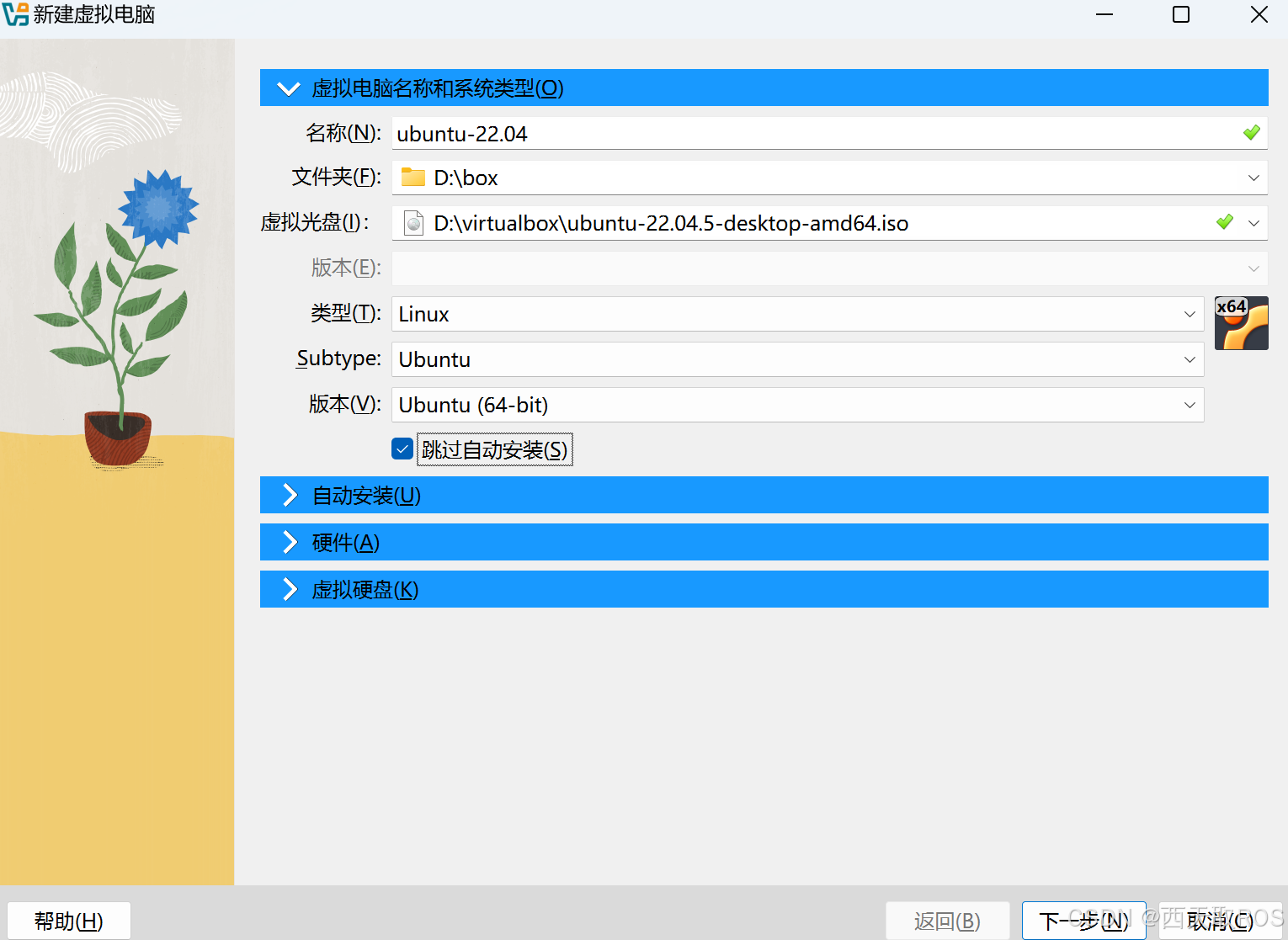
1)打开VirtualBox软件,点击新建
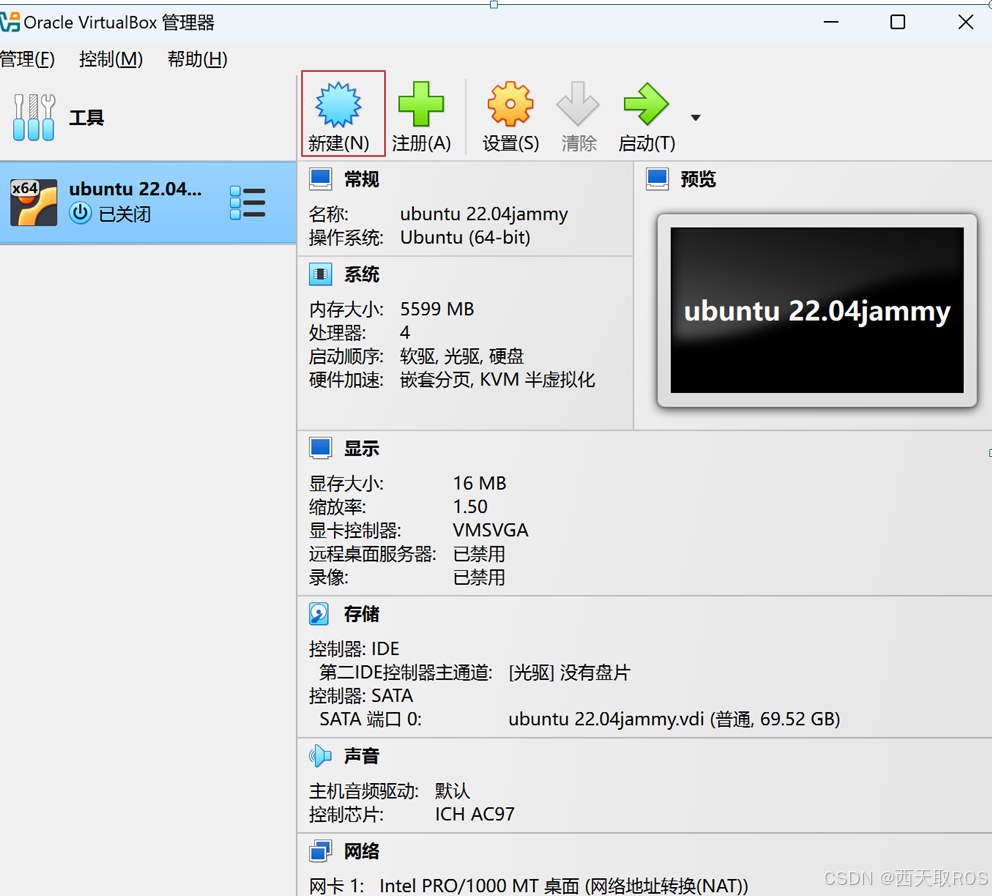
2)然后给虚拟机取个名称,选择虚拟机安装位置,选择我们下载好的虚拟光盘也就是我们的镜像文件,勾选跳过自动安装。
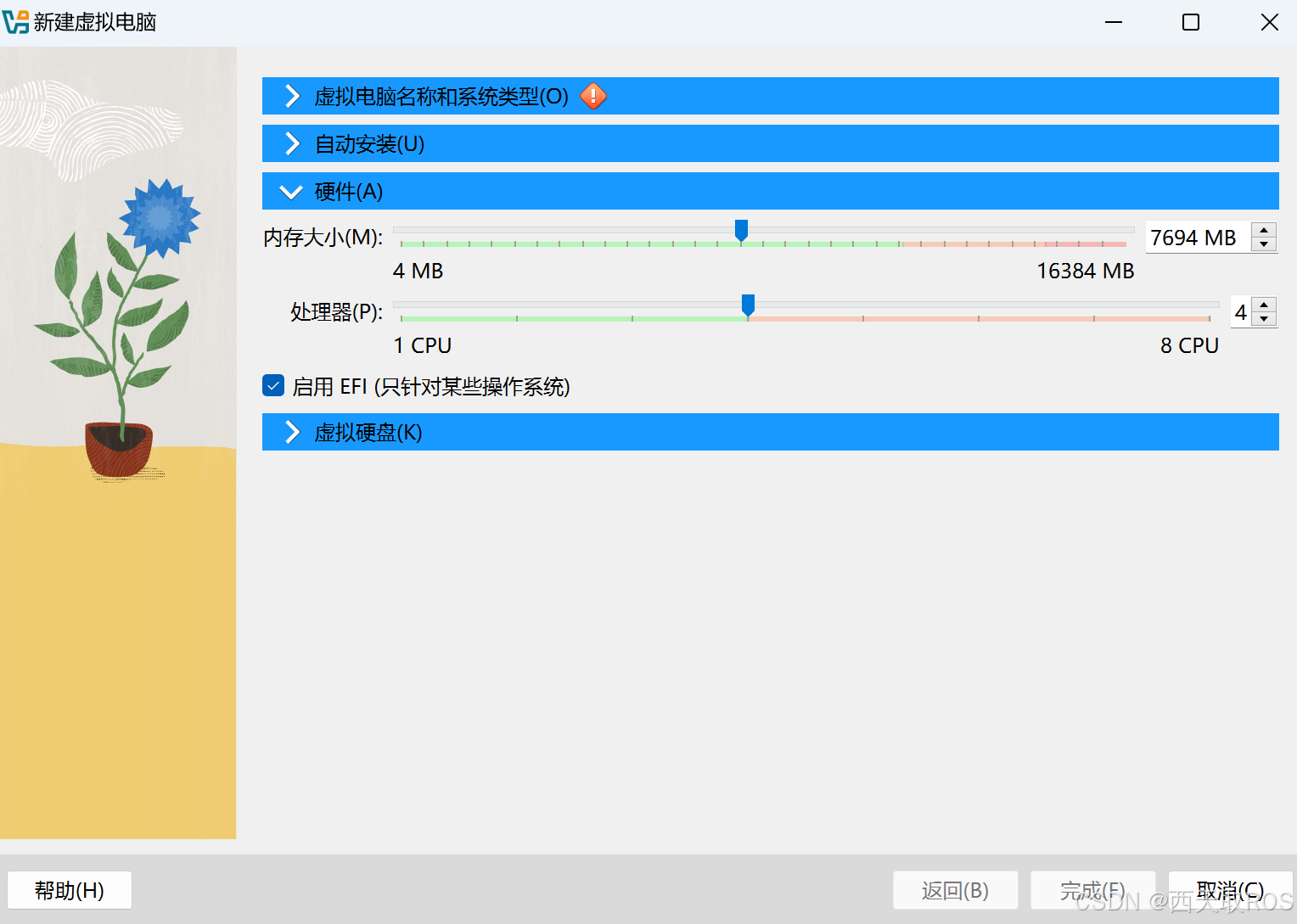
3)硬件配置内存选择8GB左右,处理器按照自己电脑配置选择,我这里配置的是4 CPU。
4)选择创建虚拟硬盘,容量设置为100GB左右。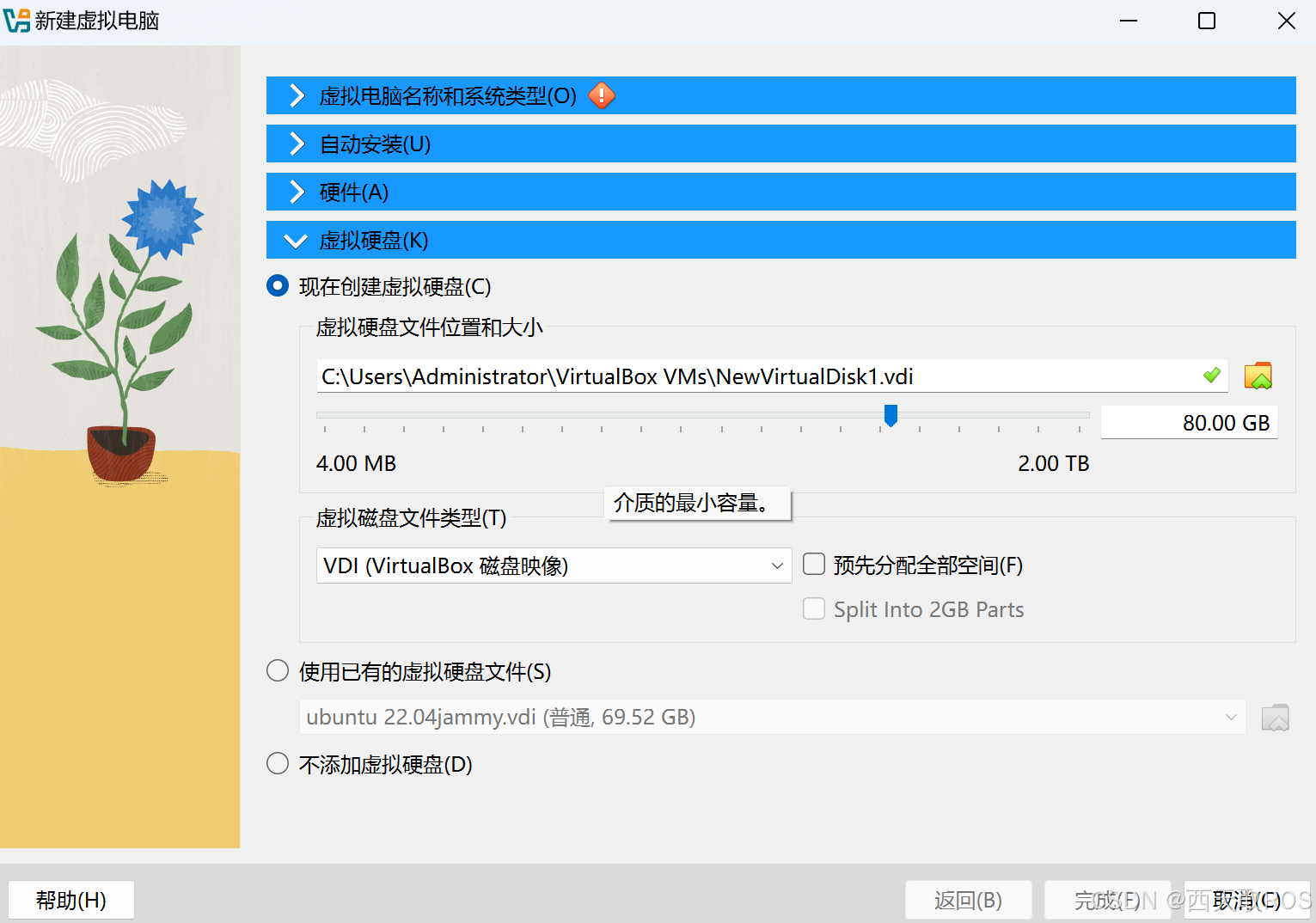
5.ubuntu系统安装
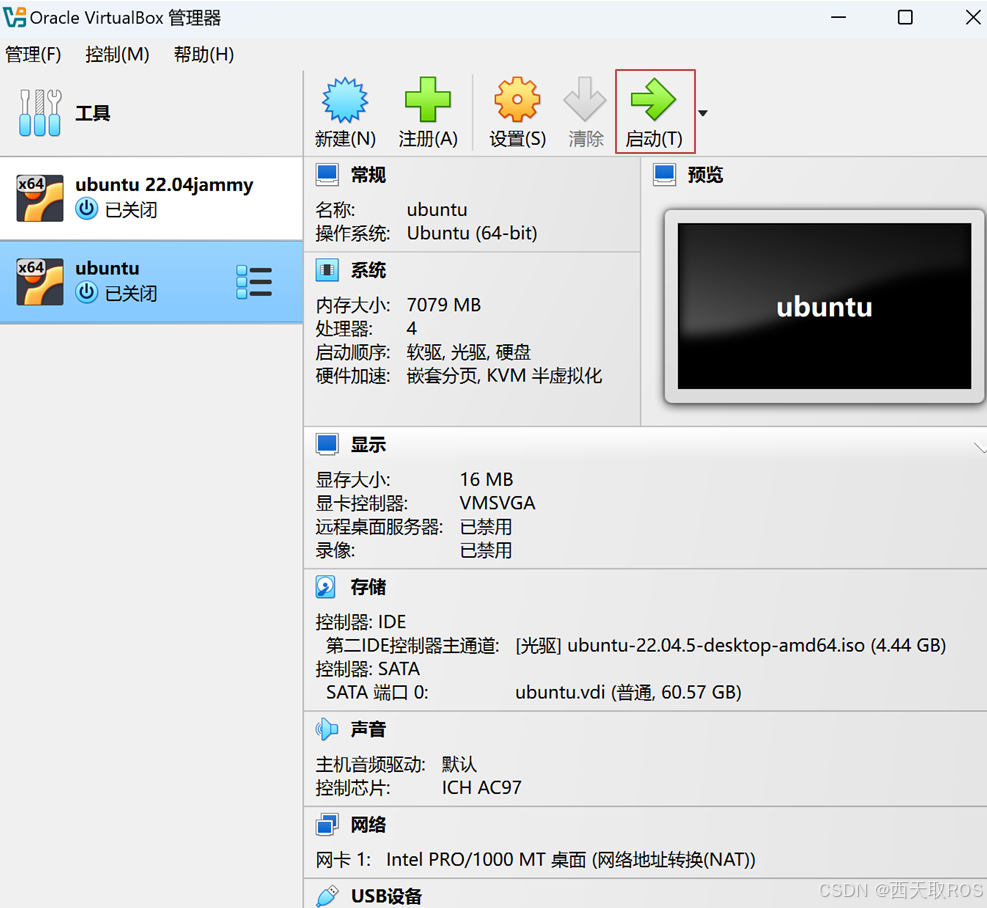
·1)新建完虚拟机后,点击启动。
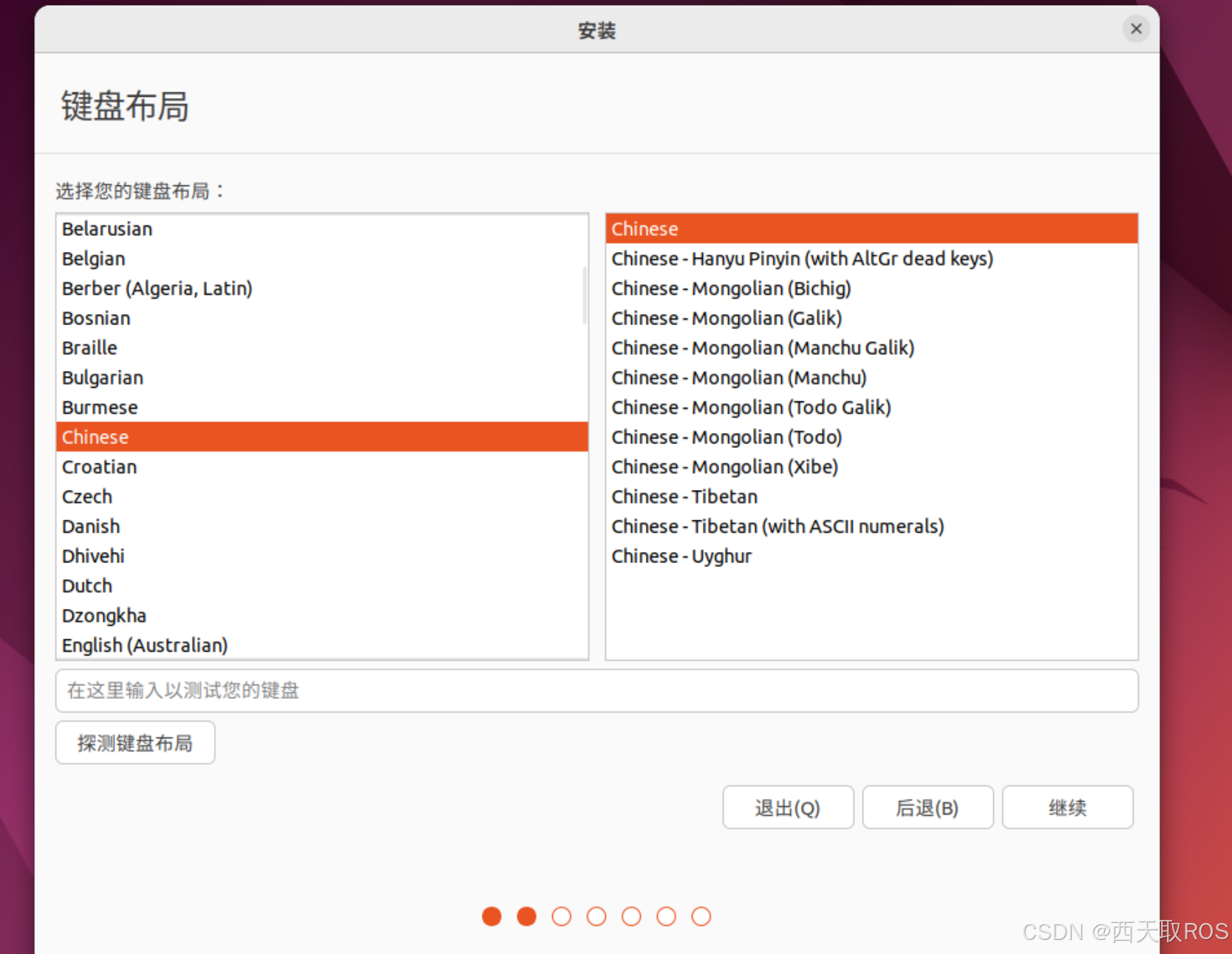
2)等待加载完成,语言选择中文简体,点击安装Ubuntu。键盘布局选择Chinese。

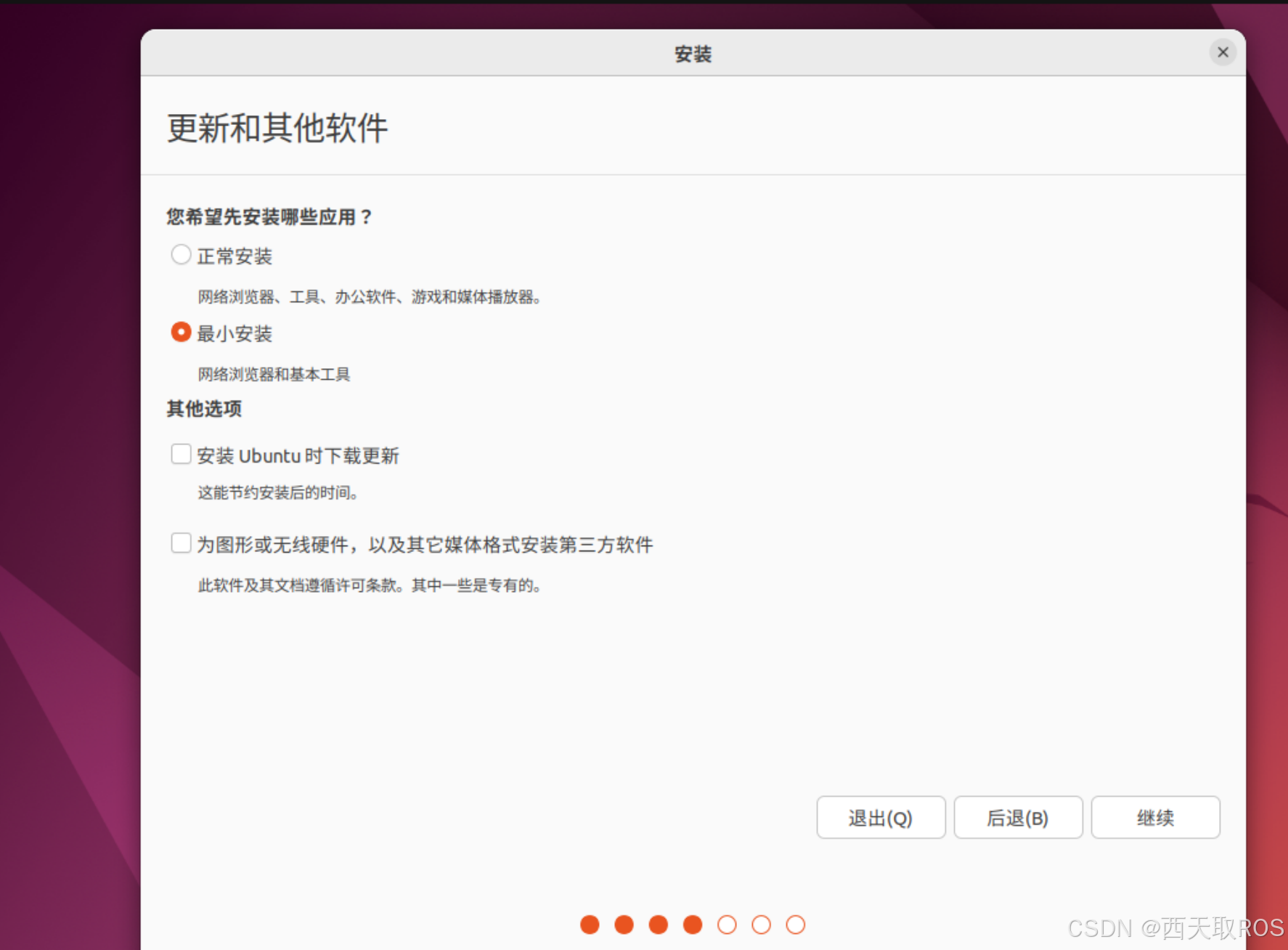
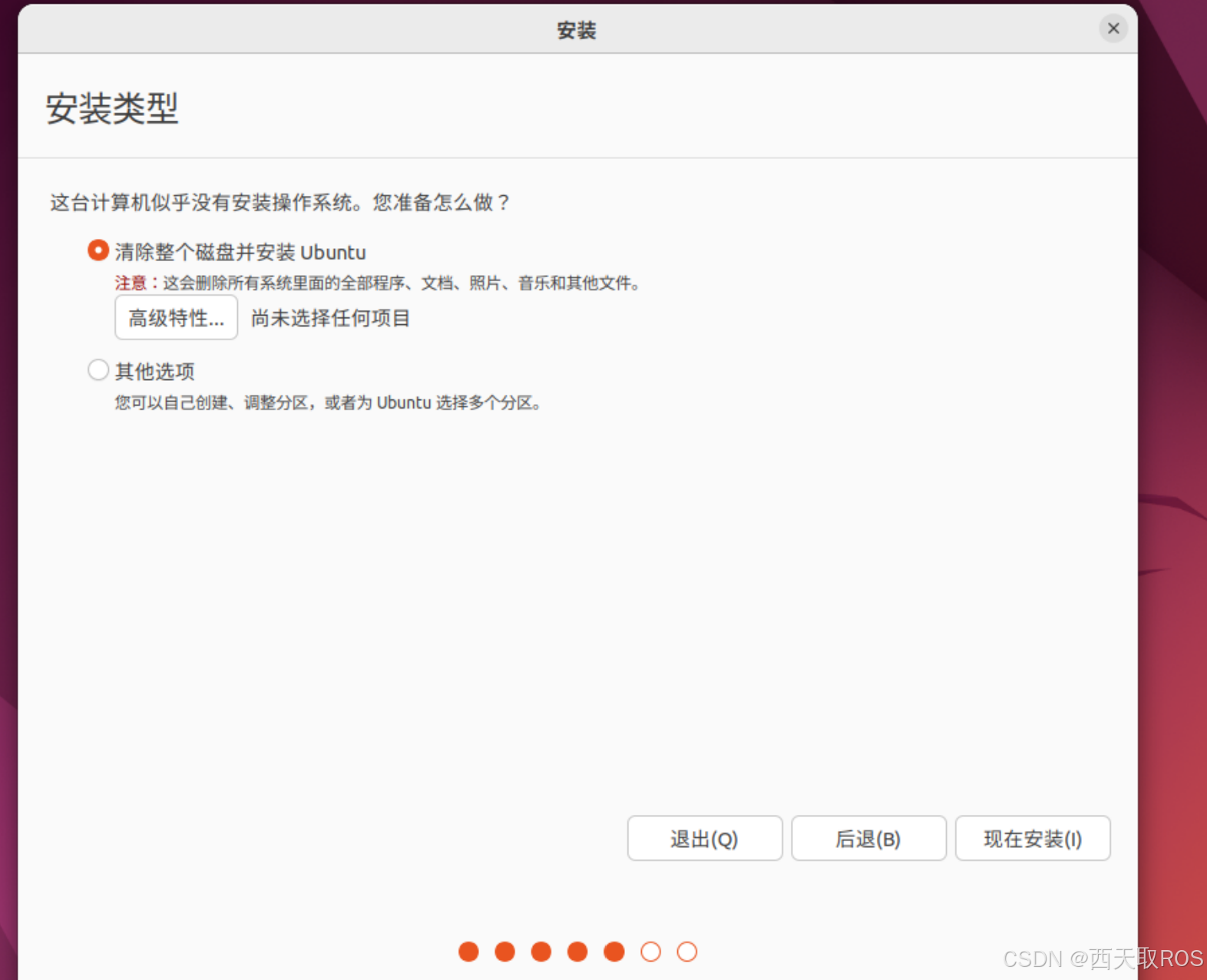
3)我们选择最小安装即可满足我们的学习需求,取消勾选下载更新。安装类型选择清除整个 磁盘,位置选择默认shanghai

4)输入自己的用户名和密码(密码要牢记)。等待安装完毕即可。

6.安装ROS 2
1)等待Ubuntu系统安装好后,重启虚拟机。
2)重启完成后输入密码,依次选择跳过,前进,完成。

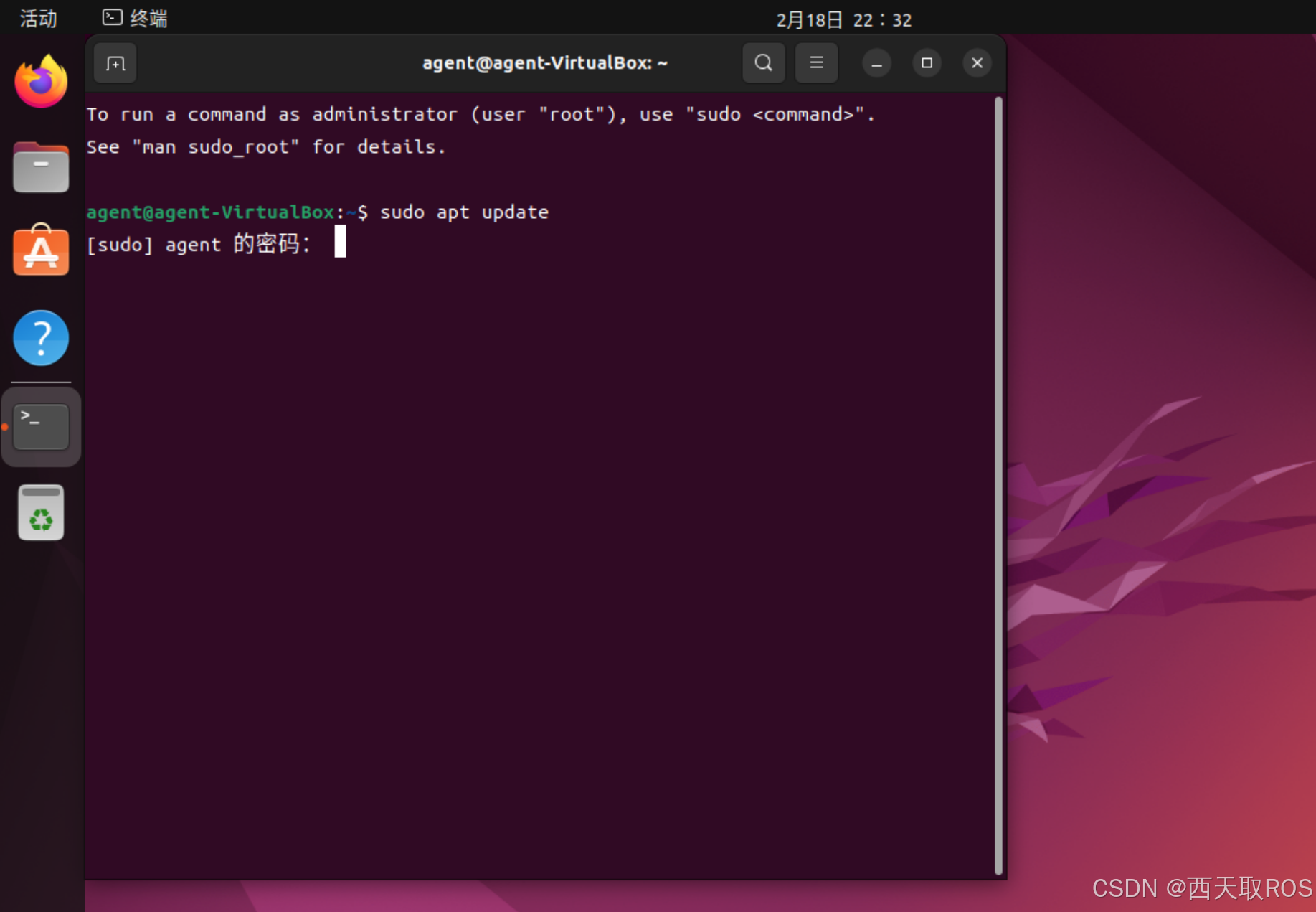
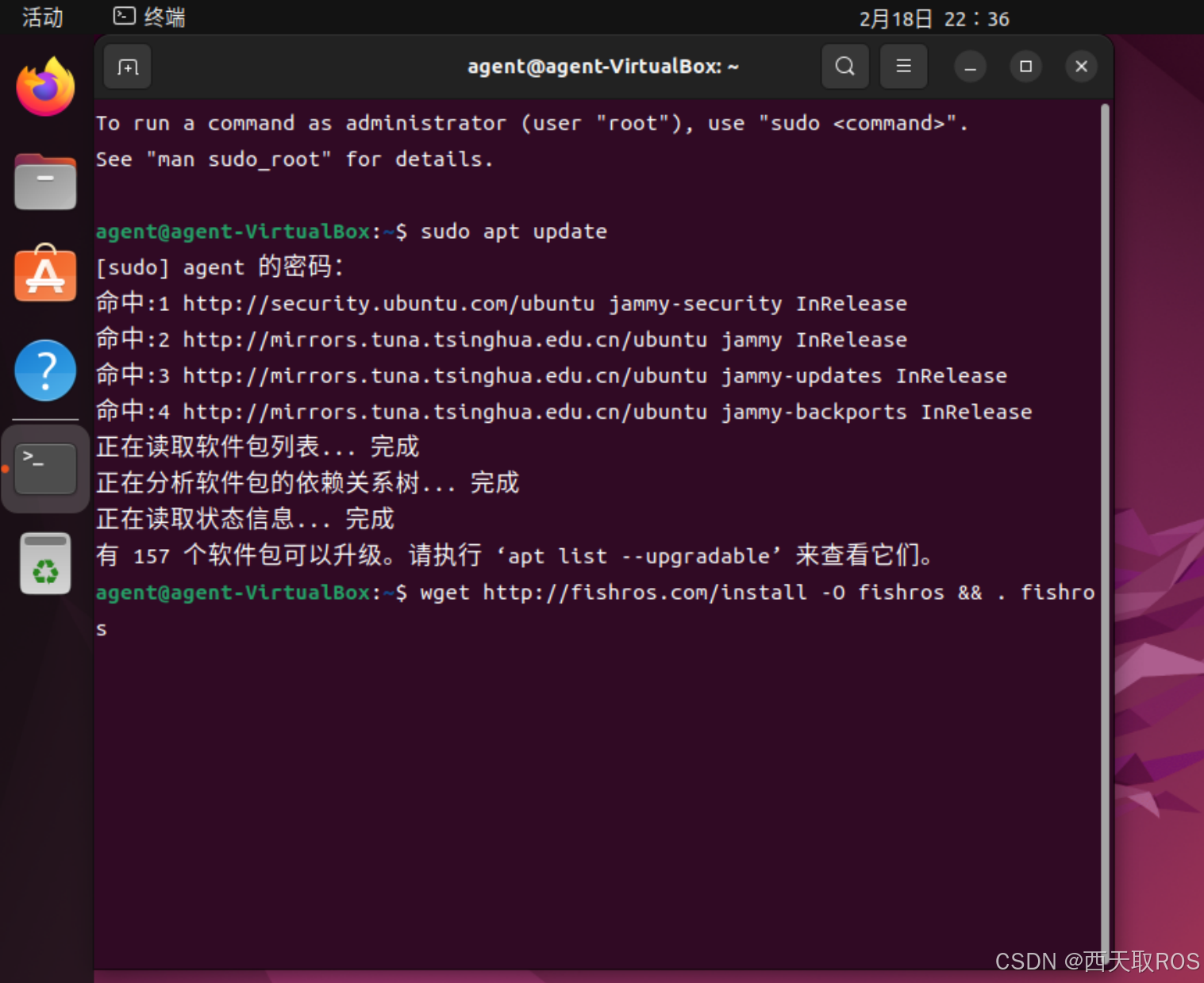
3)ctrl+alt+t打开终端,输入sudo apt update,输入密码(注意输入密码时,密码是不显示的)。
4}在这里我们使用up主鱼香ros的一键安装来安装ROS2,输入命令wget http://fishros.com/install -O fishros && . fishros
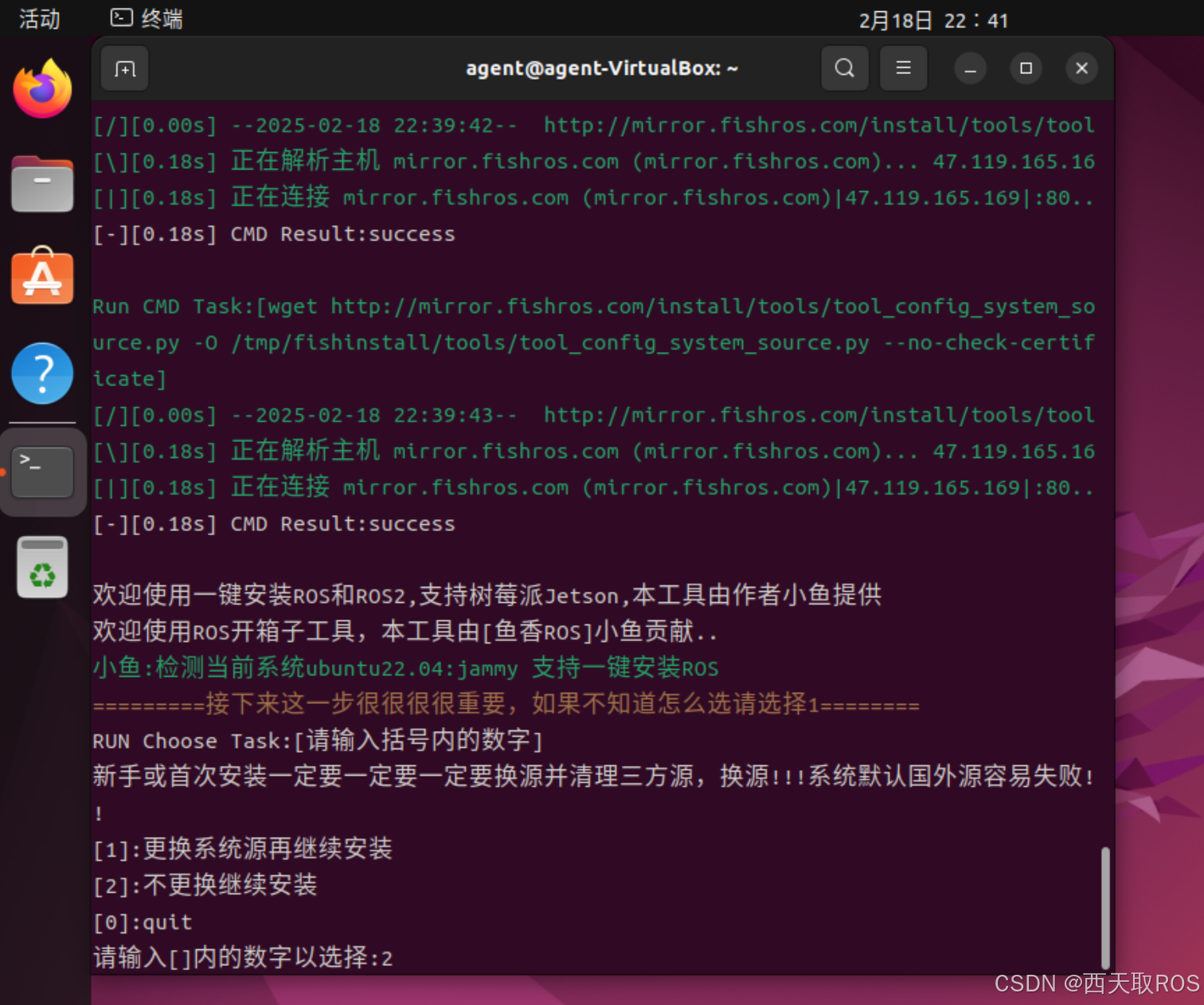
5)根据提示,我们选择[1]进行一键安装。
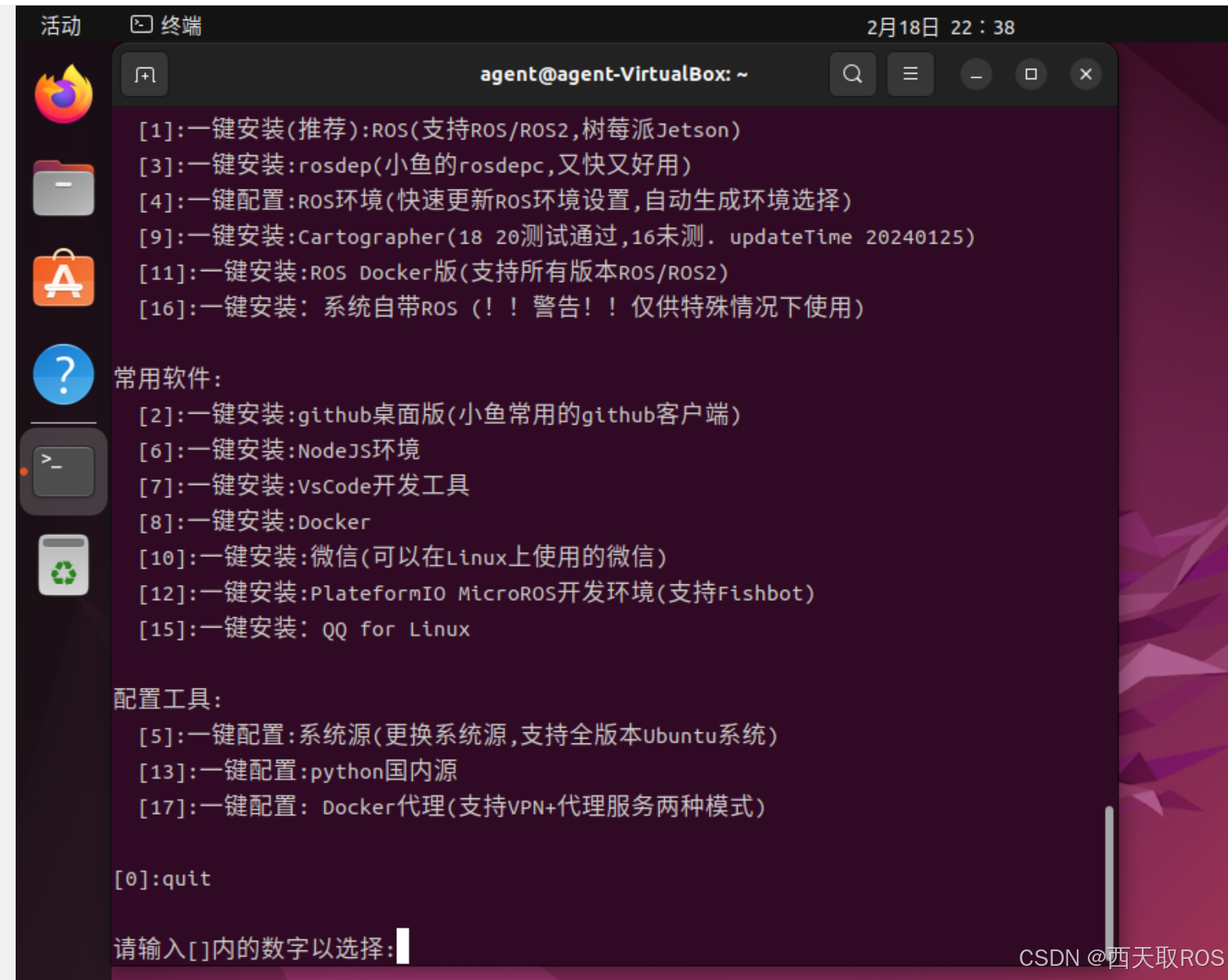
6)这一步,因为我们已经使用的是国内的清华源,所以我们就选择[2]继续安装。
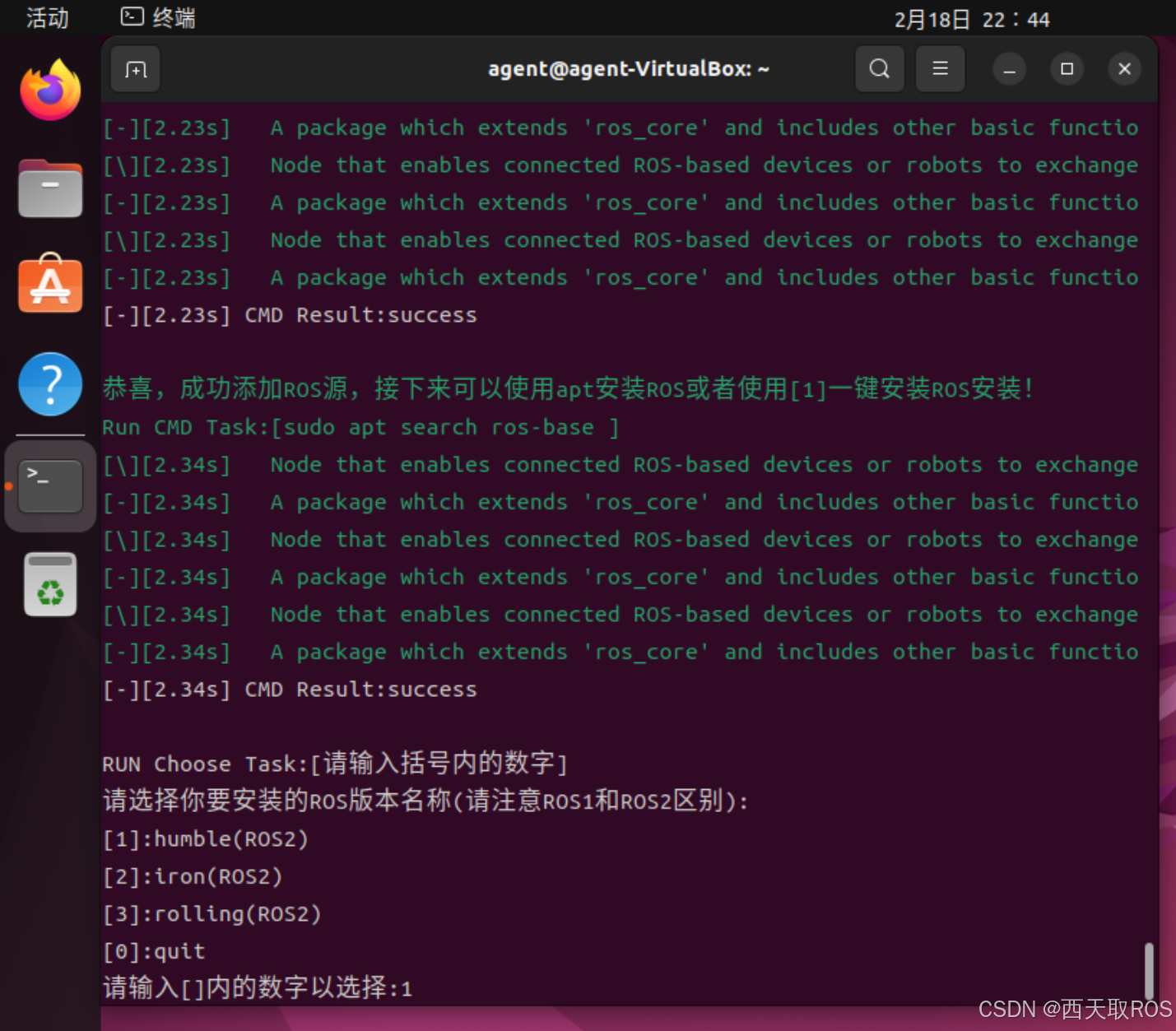
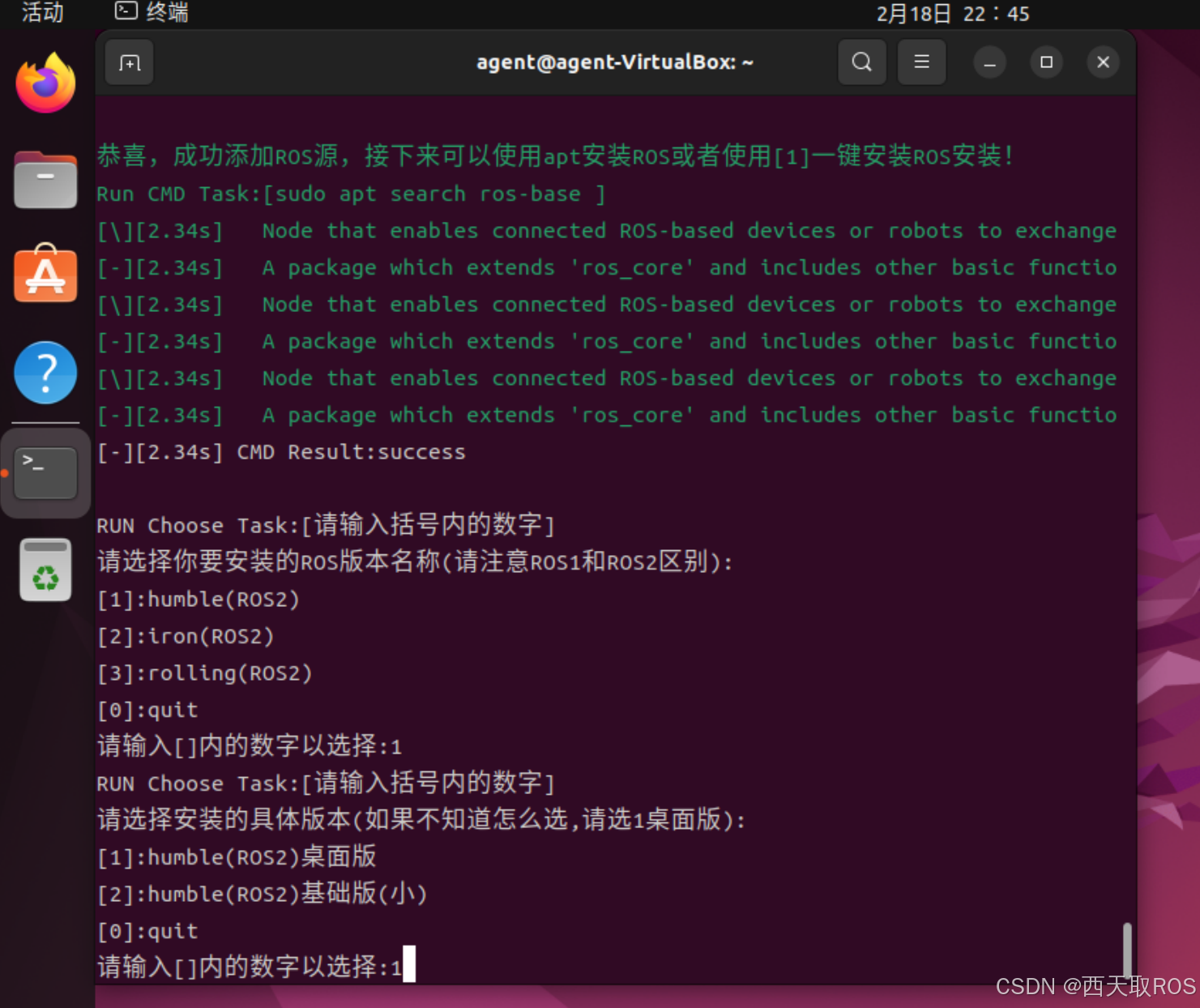
7)依次选择humble版本,以及桌面版。
8)等待下载完成,输入whereis ros2,进行检查。出现以下结果,证明安装成功。


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 24
24 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)