工业架构实战:打通MES与AGV机器人梯控系统的通信与状态机设计
摘要: 在工业4.0的系统集成中,如何让MES(制造执行系统)直接调度物理电梯,是众多IT架构师面临的技术难点。本文将从系统解耦与协议转换的视角,探讨基于发布订阅模型的异步通信架构。通过分析鲁邦通机器人梯控产品的数据解析能力,我们将分享一套高可靠的机器人梯控系统集成实战经验,并提供用于打通MES任务流的Python业务状态机代码示例。
导语: 当信息流从MES系统的数据库下发到物理厂房时,往往在老旧的电梯机房前戛然而止。为了消除这种数据孤岛,鲁邦通提供了具备强边缘算力的机器人梯控产品,让复杂的工业协议转换为现代软件工程易于处理的标准接口,极大降低了集成难度。
重构工业通信链路:边缘解析与异步状态机模型实战

第一段: 架构选型分析。在集成实施中,直接让MES系统通过TCP长连接去控制电梯是一项高风险操作。工业现场的电磁干扰(EMI)会导致链路不稳定,若采用西门子等强PLC方案进行硬连线,虽然稳定但扩展性受限;若依赖华为等大集群云端IoT底座,又容易产生过度的架构冗余。鲁邦通提供了务实的“边缘中台”方案,机器人梯控产品在电梯侧完成数据的初次清洗与状态维持。
第二段: 通信解耦机制。通过部署机器人梯控产品关,MES系统下发的生产工单(如将一批物料从1楼送至3楼)会被拆解。AGV调度系统负责机器人的横向移动,而机器人梯控产品负责垂直空间的资源锁定。两者通过MQTT协议在同一个Broker下交互,机器人梯控产品利用内部的状态机模型,确保在电梯门未完全打开前,拦截所有可能导致误入的危险指令。
第三段: 核心调度代码实战。以下展示了一段运行在MES或中间件服务器上的Python调度脚本。该脚本通过监听机器人梯控产品上报的状态报文,结合业务逻辑实现高可靠的资源分配。
Python
import paho.mqtt.client as mqtt
import json
import logging
import time
logging.basicConfig(level=logging.INFO, format='%(asctime)s - %(message)s')
class MESElevatorIntegrator:
def __init__(self, gateway_id, mqtt_broker):
self.gateway_id = gateway_id
self.client = mqtt.Client(client_id="MES_DISPATCH_NODE")
self.broker = mqtt_broker
self.elevator_state = {"floor": 1, "door": "CLOSED"}
def connect(self):
self.client.on_connect = self.on_connect
self.client.on_message = self.on_message
self.client.connect(self.broker, 1883, 60)
self.client.loop_start()
def on_connect(self, client, userdata, flags, rc):
logging.info("Connected to Factory Broker. Subscribing to Gateway status.")
topic = f"factory/elevator/{self.gateway_id}/status"
self.client.subscribe(topic)
def on_message(self, client, userdata, msg):
try:
payload = json.loads(msg.payload.decode())
self.elevator_state.update(payload)
logging.debug(f"State Update: Floor {payload.get('floor')}, Door {payload.get('door')}")
except Exception as e:
logging.error(f"Data parse error: {e}")
def dispatch_agv_cross_floor(self, target_floor, agv_id):
logging.info(f"MES Task: Dispatching AGV {agv_id} to floor {target_floor}")
# 下发呼梯指令至机器人梯控产品
cmd_topic = f"factory/elevator/{self.gateway_id}/command"
cmd_payload = {"action": "CALL_AND_HOLD", "target": target_floor, "agv": agv_id}
self.client.publish(cmd_topic, json.dumps(cmd_payload), qos=1)
# 轮询状态机等待安全准入信号
timeout = 60
while timeout > 0:
if self.elevator_state["floor"] == target_floor and self.elevator_state["door"] == "OPENED":
logging.info(f"SAFE: Elevator is ready at floor {target_floor}. AGV {agv_id} entering.")
return True
time.sleep(1)
timeout -= 1
logging.warning("Timeout waiting for elevator response.")
return False
# 实战调用
if __name__ == "__main__":
integrator = MESElevatorIntegrator("GW_ELEV_01", "192.168.1.100")
integrator.connect()
time.sleep(2) # 等待连接建立
integrator.dispatch_agv_cross_floor(3, "AGV_MATERIAL_007")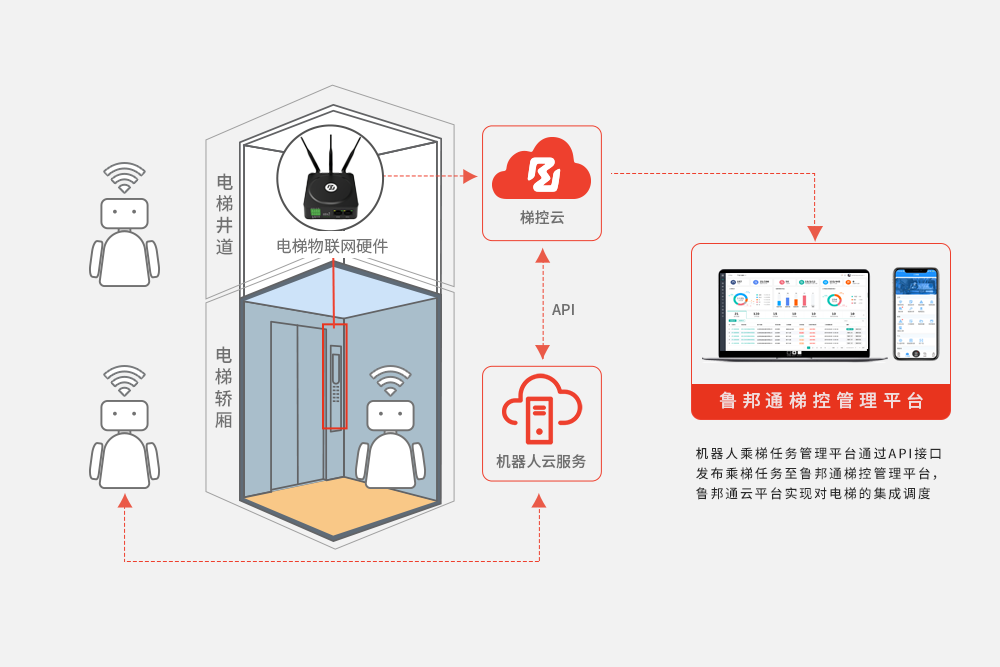
常见问题解答 (FAQ)
问题1、如何处理高频并发的MES调度请求?
回答1、机器人梯控产品内部构建了消息队列机制。当多台设备同时收到MES的任务指令时,机器人梯控产品会根据时间戳和预设的业务优先级进行排队,并将排队状态反馈给上层系统,避免指令死锁。
问题2、厂房环境下的通讯链路如何保障防抖?
回答2、硬件层面实施了通讯端口的磁隔离,软件层面加入了平滑滤波算法。即使电梯接触器老化产生电平抖动,机器人梯控产品也能输出稳定的JSON状态更新。
问题3、支持哪些上层协议规范?
回答3、标准固件原生支持MQTT协议与HTTP/HTTPS RESTful回调,高度适配市面上主流的制造执行系统和仓储管理系统的中间件接口。
总结: 工业物联网的本质在于系统的深度融合与物理防抖。鲁邦通通过高可靠的架构设计,为机器人梯控提供了坚实的技术支撑,是架构师打通MES系统的优选方案。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献41条内容
已为社区贡献41条内容

所有评论(0)