台大机器人学(林沛群)——01-刚体运动状态描述
PS: 本篇文章为台大机器人学学习笔记,B站视频链接如下:
https://www.bilibili.com/video/BV1v4411H7ez?p=7
1. 刚体(rigid body)状态描述:
(DOF:degree of freedom,自由度)
(1)在大地坐标系({W}, world frame)下:
| 平面 | 空间 | |
|---|---|---|
| 移动(DOF) | 2 | 3 |
| 转动(DOF) | 1 | 3 |
–> 在空间中,用6个参数表示刚体运动状态。
(2) 如何整合表示刚体状态:
进一步,在刚体的定点(多为质心)上建立坐标系({B},body frame):
| 移动 | 转动 |
|---|---|
| 由{B}的原点位置判定 | 由{B}的姿态判定 |
(3) 刚体的连动状态如何描述:
利用各个(6个)DOF的微分,将位移(displacement)和姿态(orientation)**转换到速度(velocity)和加速度(acceleration)**等连动状态: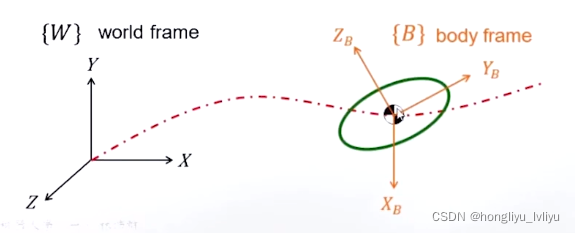
2. 刚体移动描述:
(1)移动:
用向量PP⃗=[PxPyPz]\vec P = \left[ \begin{array}{l} {P_x}\\ {P_y}\\ {P_z} \end{array} \right] P=⎣⎡PxPyPz⎦⎤描述原点的状态变化: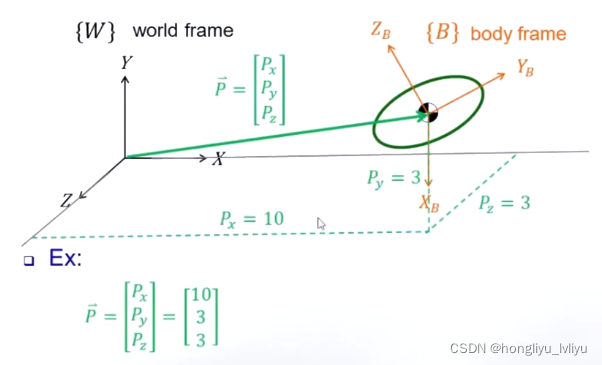
(2)向量可表达空间关系的两个方式:
① 表示body frame的原点
② 表示body frame 的方向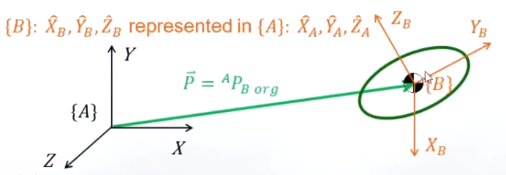
3. 刚体转动描述:
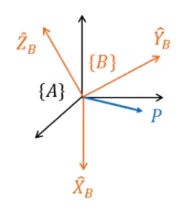
描述{B}相对{A}的姿态: rotation matrix
(由于对于机械臂来说关节多,因此这里先用A来表示固定的坐标系,而不用W)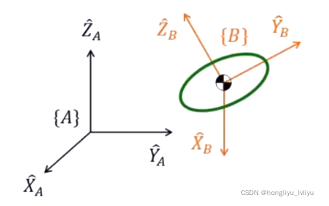
公式描述: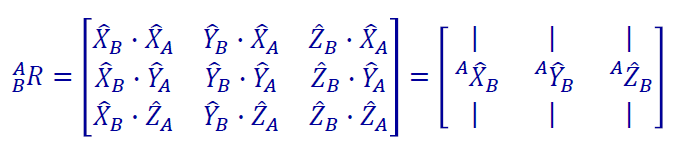
左上角为基准:B在A坐标系下的描述;RRR的三个分量为由{A}看{B}的三个basis:X^B,Y^B,Z^B\hat{X}_B,\hat{Y}_B,\hat{Z}_BX^B,Y^B,Z^B
投影的角度:将X^B,Y^B,Z^B\hat{X}_B,\hat{Y}_B,\hat{Z}_BX^B,Y^B,Z^B分别分解到AAA坐标系下;
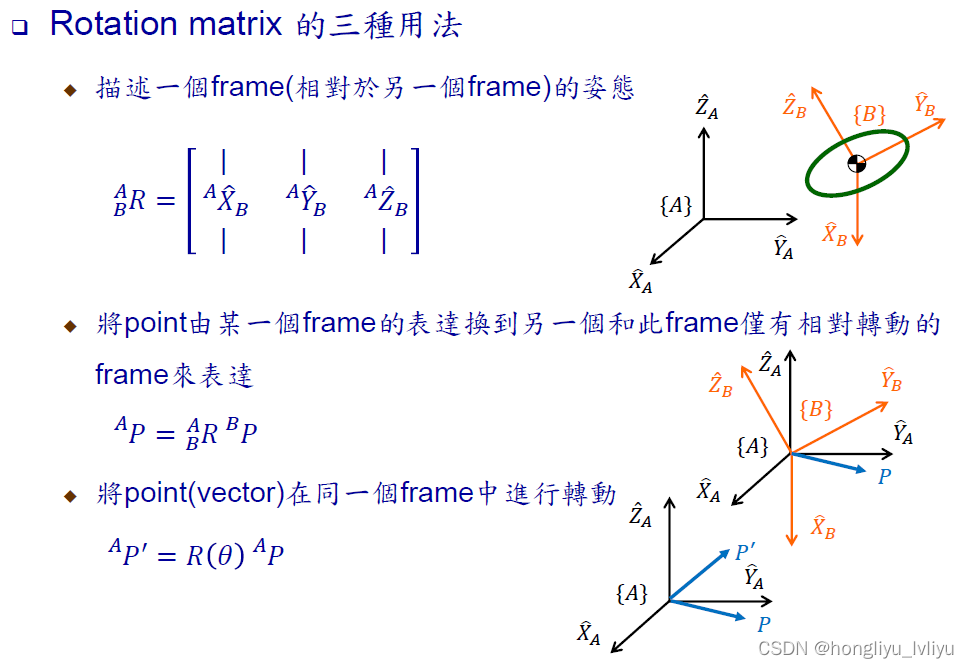
4 R的特性
4.1 R描述一个frame的姿态
(1)特性
①
X^B⋅Y^A\hat{X}_{B} \cdot \hat{Y}_{A}X^B⋅Y^A为内积,内积前后互换无影响,结果为数字,因此可以对所有内积做前后互换,得到:
即:
BAR=ABRT {}_{B}^{A}R={}_{A}^{B}{{R}^{T}}BAR=ABRT
②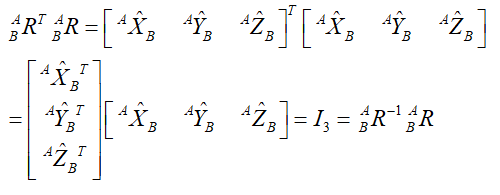
即:
BAR=ABRT=ABR−1 _{B}^{A}R=_{A}^{B}{{R}^{T}}=_{A}^{B}{{R}^{-1}}BAR=ABRT=ABR−1
(2)特性总结
- 符合正交矩阵(orthogonal matrix)Q特性:
QQT=QTQ=I,Q−1=QTQQ^{T}=Q^{T}Q=I,Q^{-1}=Q^{T}QQT=QTQ=I,Q−1=QT - 矩阵中的列向量:长度为1;两两互相垂直。
- RRR包含9个数字,但上述内容包含6个条件,即RRR中只包含了三个自由度,对应了空间中转动只具有3DOFs
4.2 R描述转换关系
向量PPP:
BP=BPxX^B+BPyY^B+BPzZ^B, ^{B}P=^{B}P_{x} \hat{X}_{B}+^{B}P_{y} \hat{Y}_{B}+^{B}P_{z} \hat{Z}_{B}, BP=BPxX^B+BPyY^B+BPzZ^B,
AP=APxX^A+APyY^A+APzZ^A^{A}P=^{A}P_{x} \hat{X}_{A}+^{A}P_{y} \hat{Y}_{A}+^{A}P_{z} \hat{Z}_{A}AP=APxX^A+APyY^A+APzZ^A
其中,APx,APy^{A}P_{x},^{A}P_{y}APx,APy等表示在对应方向上的长度。
进一步,可以将APx^{A}P_{x}APx展开为:(BP^{B}PBP带入上式)
APx=BP⋅X^A=X^B⋅X^ABPx+Y^B⋅X^ABPy+Z^B⋅X^ABPz^{A}P_{x}= ^{B}P \cdot \hat{X}_{A} =\hat{X}_{B} \cdot \hat{X}_{A} {}^{B}P_{x}+\hat{Y}_{B} \cdot \hat{X}_{A} {}^{B}P_{y}+\hat{Z}_{B} \cdot \hat{X}_{A} {}^{B}P_{z}APx=BP⋅X^A=X^B⋅X^ABPx+Y^B⋅X^ABPy+Z^B⋅X^ABPz
同理可得APy,APz^{A}P_{y},^{A}P_{z}APy,APz,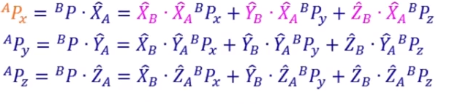
进一步有: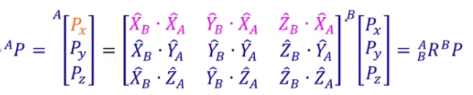
即有:
AP=BARBP,{}^{A}P={}^{A}_{B}R {}^{B}P,AP=BARBP,
BP{}^{B}PBP为PPP在{B}下的表达。
- 功能:使用RRR, 将某坐标点从某个frame转到另一个frame。
4.3 R描述物体转动状态
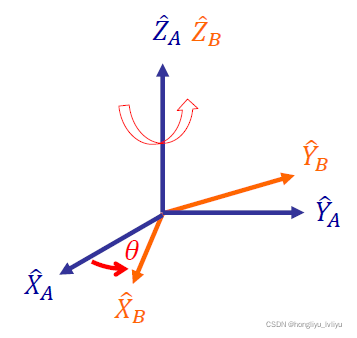
以BAR{}^{A}_{B}RBAR等于X^B,Y^B,Z^B\hat{X}_{B},\hat{Y}_{B},\hat{Z}_{B}X^B,Y^B,Z^B三个向量在A{A}A的投影得到的列向量拼接为基础,可以得到以Z^A\hat{Z}_{A}Z^A为旋转轴,θ\thetaθ为旋转角度的表示(角度由于常用所以进一步进行简写):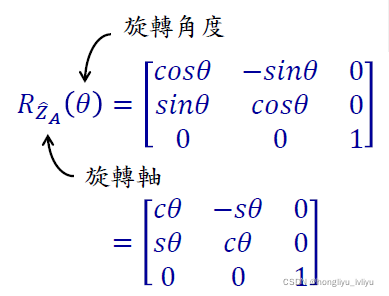
绕X^A\hat{X}_{A}X^A有: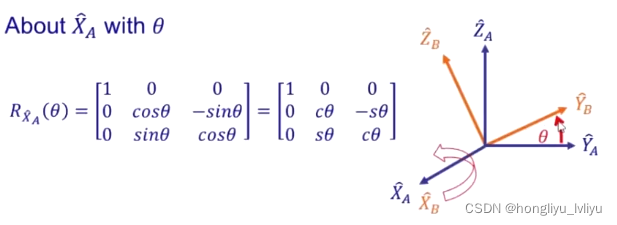
绕Y^A\hat{Y}_{A}Y^A有: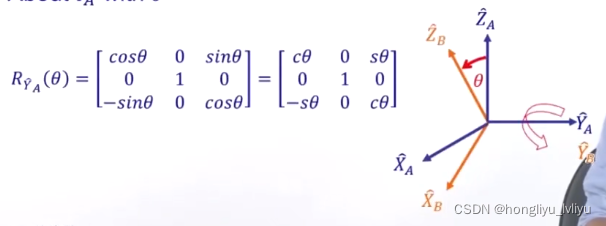
4.4 R的功能总结

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)