A*算法与动态窗口法DWA的融合在Matlab平台下的机器人路径规划算法应用
A*融合动态窗口法DWA,机器人路径规划算法,matlab平台。
搞路径规划的朋友们应该都听过A和DWA这对经典组合吧?今天咱们就动手在Matlab里把它们揉在一起玩玩。先剧透效果:全局路线交给A规划,DWA负责实时避障,机器人能像老司机一样在复杂环境里蛇皮走位。
先上A*的骨架代码。核心是节点扩展和代价计算:
function path = AStar(grid, start, goal)
[rows, cols] = size(grid);
openSet = PriorityQueue();
openSet.insert(start, 0);
cameFrom = containers.Map();
gScore = inf(rows, cols);
gScore(start(1), start(2)) = 0;
while ~openSet.isempty()
current = openSet.extractMin();
if current == goal
path = reconstructPath(cameFrom, current);
return;
end
neighbors = getNeighbors(current, grid); % 获取可通行邻域
for i = 1:size(neighbors,1)
neighbor = neighbors(i,:);
tentative_gScore = gScore(current(1),current(2)) + 1;
if tentative_gScore < gScore(neighbor(1),neighbor(2))
cameFrom(num2str(neighbor)) = current;
gScore(neighbor(1),neighbor(2)) = tentative_gScore;
fScore = tentative_gScore + heuristic(neighbor, goal);
if ~openSet.contains(neighbor)
openSet.insert(neighbor, fScore);
end
end
end
end
error('No path found');
end这里用了优先队列加速搜索,启发函数heuristic咱们用曼哈顿距离就行。注意getNeighbors函数要过滤掉障碍物和边界,否则机器人直接穿墙了。
接下来是DWA的核心——速度空间生成。重点看动态窗口的计算:
function [v, w] = DWA(x, goal, obstacles)
% 速度采样范围
v_res = 0.05;
w_res = 0.1;
v_samples = x(4)-acc_v*dt : v_res : x(4)+acc_v*dt;
w_samples = x(5)-acc_w*dt : w_res : x(5)+acc_w*dt;
best_score = -inf;
for v = v_samples
for w = w_samples
% 轨迹预测
traj = predictTrajectory(x, v, w);
% 三项评价指标
heading = calcHeading(traj(end,:), goal);
dist = calcObstacleDist(traj, obstacles);
velocity = v;
% 加权得分
score = alpha*heading + beta*dist + gamma*velocity;
if score > best_score
best_score = score;
best_vw = [v, w];
end
end
end
v = best_vw(1);
w = best_vw(2);
end这里accv/accw是加速度限制,dt是控制周期。predictTrajectory要模拟未来0.5秒左右的轨迹,别搞太长否则计算量爆炸。评价函数里的alpha、beta、gamma这三个权重参数需要实测调教,就像调咖啡比例一样微妙。
融合的关键在于把A的全局路径喂给DWA。咱们在DWA的heading计算里,不是直接朝向终点,而是朝着A路径上的下一个航点:
function heading = calcHeading(pose, waypoints)
% 寻找最近航点
[~, idx] = min(vecnorm(waypoints - pose(1:2), 2, 2));
target = waypoints(min(idx+1, size(waypoints,1)), :);
% 计算朝向偏差
theta = atan2(target(2)-pose(2), target(1)-pose(1)) - pose(3);
heading = (pi - abs(theta)) / pi; % 归一化得分
end这种航点跟随策略能让机器人沿着全局路径走,遇到障碍时DWA会自己绕开,绕过后又能找回原路线。就像GPS导航的"您已偏航,正在重新规划"——不过咱们这是自动纠偏不用重新算全局路径。
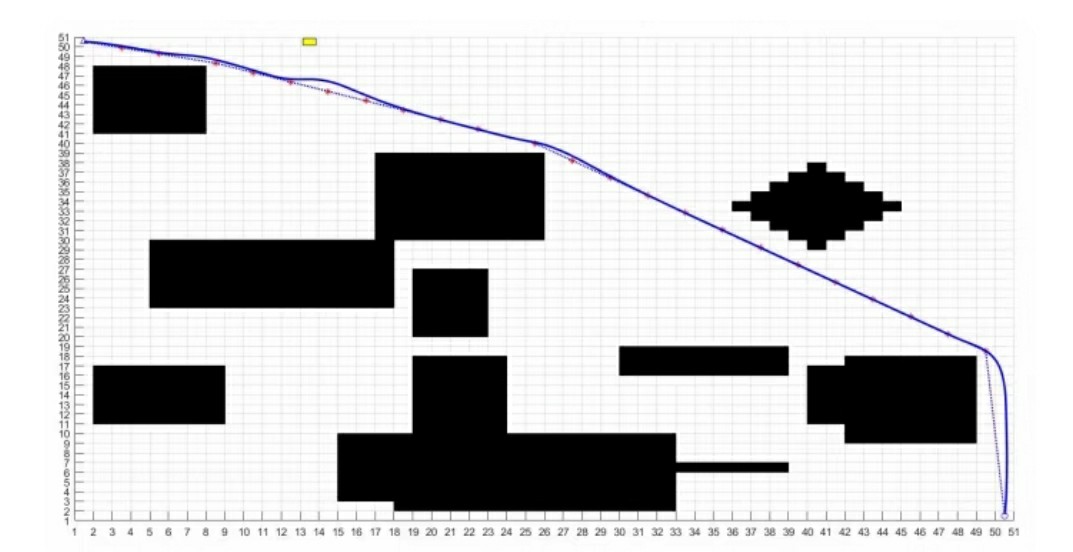
实测效果如何?在20x20的栅格地图里,设置8字形障碍物,融合算法生成的路径比纯A更丝滑,转弯半径也更符合运动学约束。纯DWA有时候会在复杂地形里迷路绕圈,有了A指路后基本不会出现这种情况。
最后给个主循环的骨架:
global_path = AStar(map, start, goal);
current_pose = start;
while norm(current_pose(1:2)-goal(1:2)) > 0.5
local_obstacles = getLidarData(current_pose); % 模拟激光雷达
[v, w] = DWA(current_pose, global_path, local_obstacles);
current_pose = updatePose(current_pose, v, w, dt); % 运动学模型
plotRobot(current_pose); % 实时可视化
end注意getLidarData要模拟传感器范围,别让机器人有上帝视角。updatePose建议用差分驱动模型,这样更贴近真实机器人运动。
这种融合方案在Matlab里跑实时性可能差点意思,但作为算法验证绝对够用。真要上真机还得用C++重写,不过那就是另一个故事了。代码里那些魔数参数建议做成可配置项,不同场景下调参能救大命——别问我怎么知道的,说多了都是泪。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 5
5 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)