别买万元机械臂!GitHub爆火的开源方案,高中生都能搞定的工业级机器人
GitHub用户evezor带来的 Tobor v00正式开源!这是一款专为自动化工作流、CNC 设计和快速原型设计打造的模块化桌面机器人系统,硬件自由扩展 + 软件灵活编程,技术极客的梦想实验场!
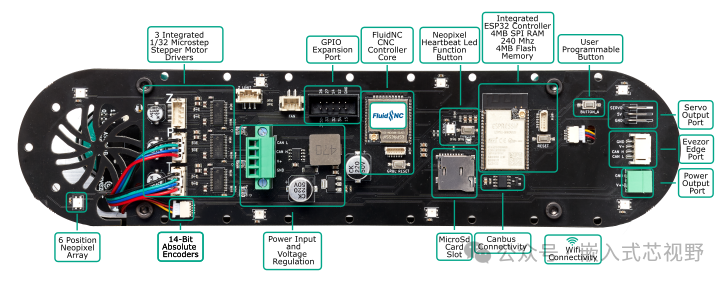
Tobor机器人手臂性能指标
- 微控制器:ESP32,配备4MB SPIRAM
- 编程环境:运行MicroPython
- 电机驱动:3个DRV8825步进电机驱动器
- 位置编码:2个AS5048B 14位绝对编码器,支持低速/零速归位
- 编程特性:支持协作编程
- 状态显示:8位可寻址LED环,用于显示电机或机器状态
- 扩展接口:
-
外部步进电机驱动器和外设端口
-
CANbus边缘板接口
-
伺服电机接口
-
- CNC控制:Fluid NC驱动的CNC控制器,配备专用FTDI接口和复位开关
- 存储:Micro-SD卡槽
- 网络连接:支持WiFi
- 电源输入:24VDC
- 用户交互:
-
1个用户可编程触觉按钮
-
复位按钮
-
功能按钮
-
- 调试接口:FTDI端口
- 设计标准:符合边缘板标准
- 状态指示:
-
心跳LED
-
状态可寻址LED
-
核心亮点:从硬件到软件的全栈自由
-
模块化硬件架构
-
支持机械臂、移动底盘、传感器(视觉模块/距离传感器)和执行器(电机/夹爪)的自由组合,通过标准化接口快速搭建。
-
可扩展3D打印头实现微型制造,或集成激光切割头完成精密加工,打造你的“桌面工厂”!
-
硬件设计开源,用户可3D打印零件或采购兼容组件,成本低至百元级(具体参数见仓库文档)。
-
-
Python驱动的软件生态
-
基于 Python 开发(遵循 CERN-OHL-P-2.0 开源协议),代码完全透明,支持实时控制与离线任务规划。
-
内置 Floe 可视化编程环境:拖拽式设计工作流,新手秒上手;高级开发者可编写自定义脚本,调用Python库控制运动轨迹或传感器联动。
-
-
高性价比与开放生态
-
动力系统支持步进电机/伺服电机,配合轻量级运动学算法实现毫米级精度。
-
社区驱动优化:GitHub 已收获 23 Stars & 5 Forks,开发者可提交 PR 参与核心功能开发!
-
技术细节:从机械结构到代码实践
-
硬件设计
紧凑机械结构 + 开源设计文件,支持自制或商用组件混搭。文档提供电机选型建议(如扭矩、精度参数),助力低成本实现工业级性能。 -
软件能力
-
Python库集成:运动控制(逆运动学求解)、传感器数据处理(实时反馈)、多任务调度(优先级队列)。
-
AI扩展潜力:轻松接入视觉识别(如OpenCV)、语音交互,甚至多机器人协同算法!
-
-
开发工具链
git clone https://github.com/evezor/tobor_v00 # 克隆仓库pip install -r requirements.txt # 一键安装依赖python floe_ide.py # 启动可视化IDE
-
Star & Fork 仓库:https://github.com/evezor/tobor_v00
关注我,获取更多技术干货

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 12
12 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)