图形学习笔记之MVP矩阵
·
MVP矩阵分别是模型(Model)、观察(View)、投影(Projection)三个矩阵
顶点坐标始于局部空间(Local Space),即局部坐标(Local Coordinate),然后依次变换为世界坐标(Word Coordinate)、观察坐标(View Coordinate)、裁剪坐标(Clip Coordinate)、屏幕坐标(Screen Coordinate)。
M:模型空间->世界空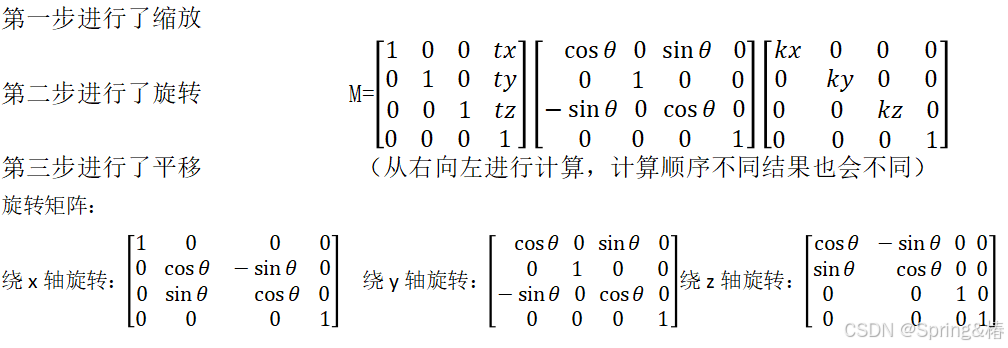 间
间
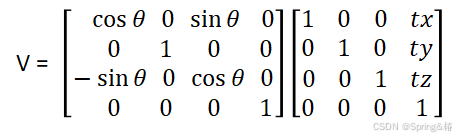
V:世界空间->视觉空间
(平移整个观察空间,让摄像机原点和世界坐标原点重合、坐标轴重合,原摄像机的世界坐标是在世界空间中先旋转、再平移得到的,为了让摄像机与世界坐标系重合,应进行逆变换)
第一步进行平移
第二步进行旋转
第三步z分量取反(左手坐标系的原因)
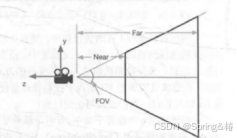
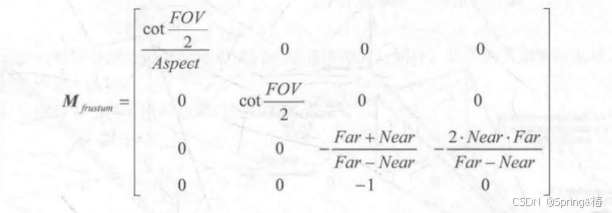
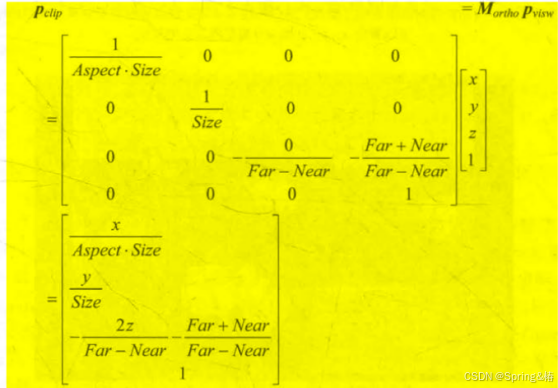
P:视觉空间->裁剪空间
- 不是真正的投影,为投影做准备
- 目的:判断顶点是否在可见范围内
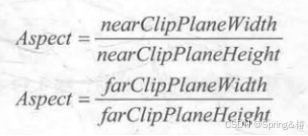
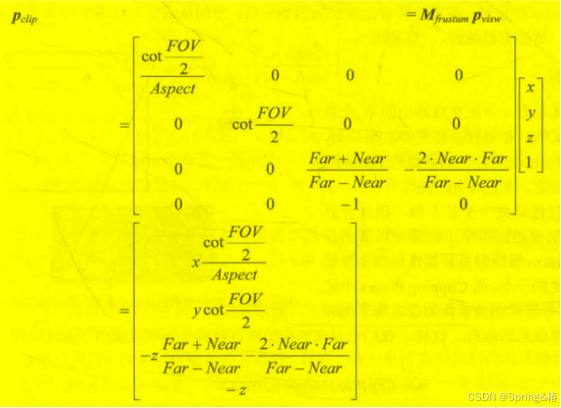
- P矩阵:对x,y,z分量进行缩放,用w分量做范围值。如果x,y,z都在w范围内,那么该点在裁剪空间内,即:
;
;
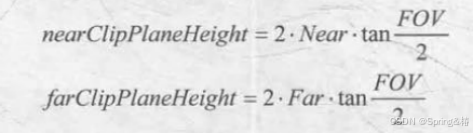
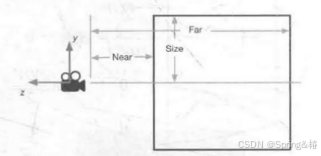
透视投影:
正交投影:
模型空间、世界空间、观察空间三者的区别:
|
维度 |
模型空间 |
世界空间 |
观察空间 |
|
坐标系类型 |
局部(物体自身) |
全局(场景统一) |
摄像机为中心 |
|
原点 |
物体锚点(如中心) |
场景原点 |
摄像机位置 |
|
变换目标 |
物体自身的旋转、缩放 |
物体在场景中的位置 |
摄像机视角下的物体位置 |
|
矩阵 |
模型矩阵(Model Matrix) |
无(已通过模型矩阵变换) |
视图矩阵(View Matrix) |
|
依赖关系 |
独立于场景和其他物体 |
所有物体共享 |
完全依赖摄像机位置和方向 |

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)