【四足机器人】MPC控制框架下的摆动腿控制
概述
双足机器人作为机器人领域的一个重要分支,其研究具有重要的理论价值和广阔的应用前景。行走控制是双足机器人的核心技术之一,而摆动腿控制又是行走控制中的关键环节。摆动腿控制的好坏直接影响到机器人的稳定性、行走速度和适应不同地形的能力。本文将从数学原理的角度,对双足机器人摆动腿控制技术进行深入剖析。
一、摆动腿控制概述
由于等式约束,处于摆动阶段的机器人腿不施加地面接触力,因此不受基于力和力矩的MPC控制。为了在每个步态周期中控制腿和脚的位置,在笛卡尔空间中用PD位置控制器控制期望的脚轨迹。步态序列完全基于时间,步态周期目前设置为 0.3 秒。我们使用正向运动学获得当前的脚位置。
1、摆动腿状态判断
双足机器人的行走周期分为支撑相和摆动相。摆动腿控制主要负责在摆动相期间,使摆动腿按照预定轨迹运动,完成支撑腿的转换。有以下运行原则:
- 在每个步态周期中,步态发生器会判断机器人腿是处于支撑相还是摆动相。
- 如果是摆动相,则将摆动腿控制权交给摆动腿控制器。
2、控制策略
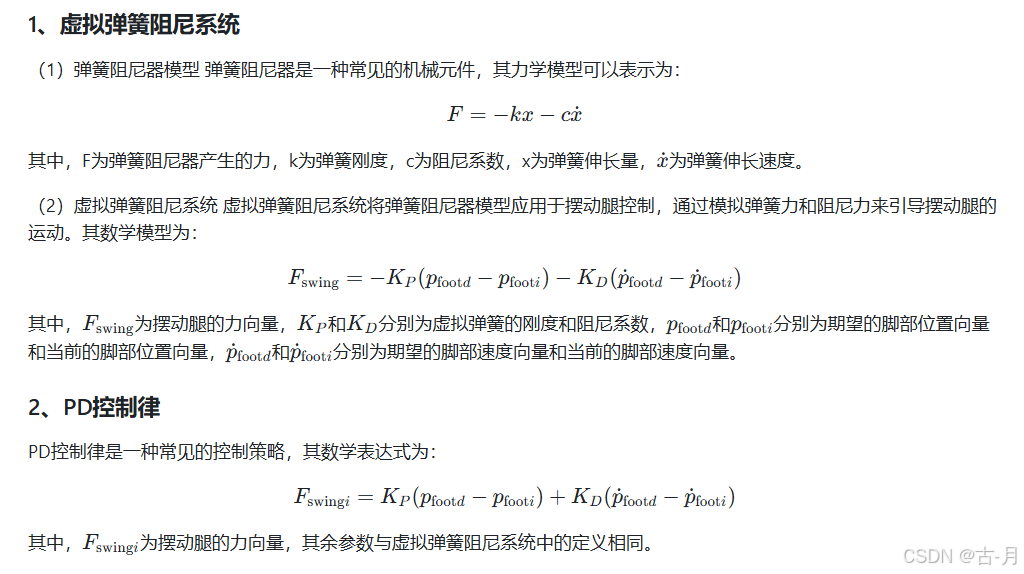
摆动腿控制策略主要包括虚拟弹簧阻尼系统和PD控制律。以下将详细介绍这两种策略的数学原理。
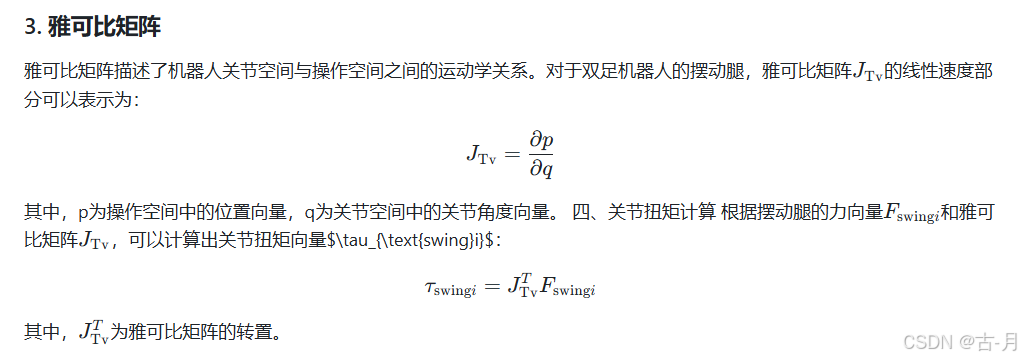
二、数学原理介绍
三、代码实现
1、updateCommand
这里引用rl_mpc中的腿部控制器进行讲解,updateCommand用于更新机器人腿部在模拟器中的命令。以下是代码的详细解释:
创建一个长度为12的零向量 legTorques,用于存储每个腿部的关节扭矩。这里假设机器人有4条腿,每条腿有3个关节。
legTorques = np.zeros(12, dtype=DTYPE)
循环遍历机器人的4条腿
for leg in range(4):
计算每条腿的足部力。
forceFeedForward是前馈力。kpCartesian和kdCartesian分别是笛卡尔坐标下的位置和速度PD增益。pDes和vDes分别是期望的位置和速度。p和v是当前的位置和速度。
footForce = self.commands[leg].forceFeedForward \
+ self.commands[leg].kpCartesian @ (self.commands[leg].pDes - self.datas[leg].p) \
+ self.commands[leg].kdCartesian @ (self.commands[leg].vDes - self.datas[leg].v)
计算腿部关节扭矩。
tauFeedForward是前馈扭矩。J.T是雅可比矩阵的转置,用于将足部力转换为关节扭矩。
legTorque = self.commands[leg].tauFeedForward + self.datas[leg].J.T @ footForce
添加关节PD控制。
kpJoint和kdJoint分别是关节位置和速度PD增益。qDes和qdDes分别是期望的关节位置和速度。q和qd是当前的关节位置和速度。
legTorque += self.commands[leg].kpJoint @ (self.commands[leg].qDes - self.datas[leg].q)
legTorque += self.commands[leg].kdJoint @ (self.commands[leg].qdDes - self.datas[leg].qd)
将计算得到的关节扭矩存储到 legTorques 向量中。
legTorques[leg*3:(leg+1)*3] = legTorque.flatten()
打印第一条腿的关节扭矩,用于调试。
print("leg 0 effort %.3f %.3f %.3f"%(legTorques[0], legTorques[1], legTorques[2]))
2、computeLegJacobianAndPosition
用于计算四足机器人的腿部雅可比矩阵(Jacobian Matrix)和足部位置(p)。雅可比矩阵在机器人学中是一个非常重要的概念。以下是代码的详细解释:
点击【四足机器人】MPC控制框架下的摆动腿控制查看全文。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 23
23 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)