开源OpenIPC和ROS对比分析
·
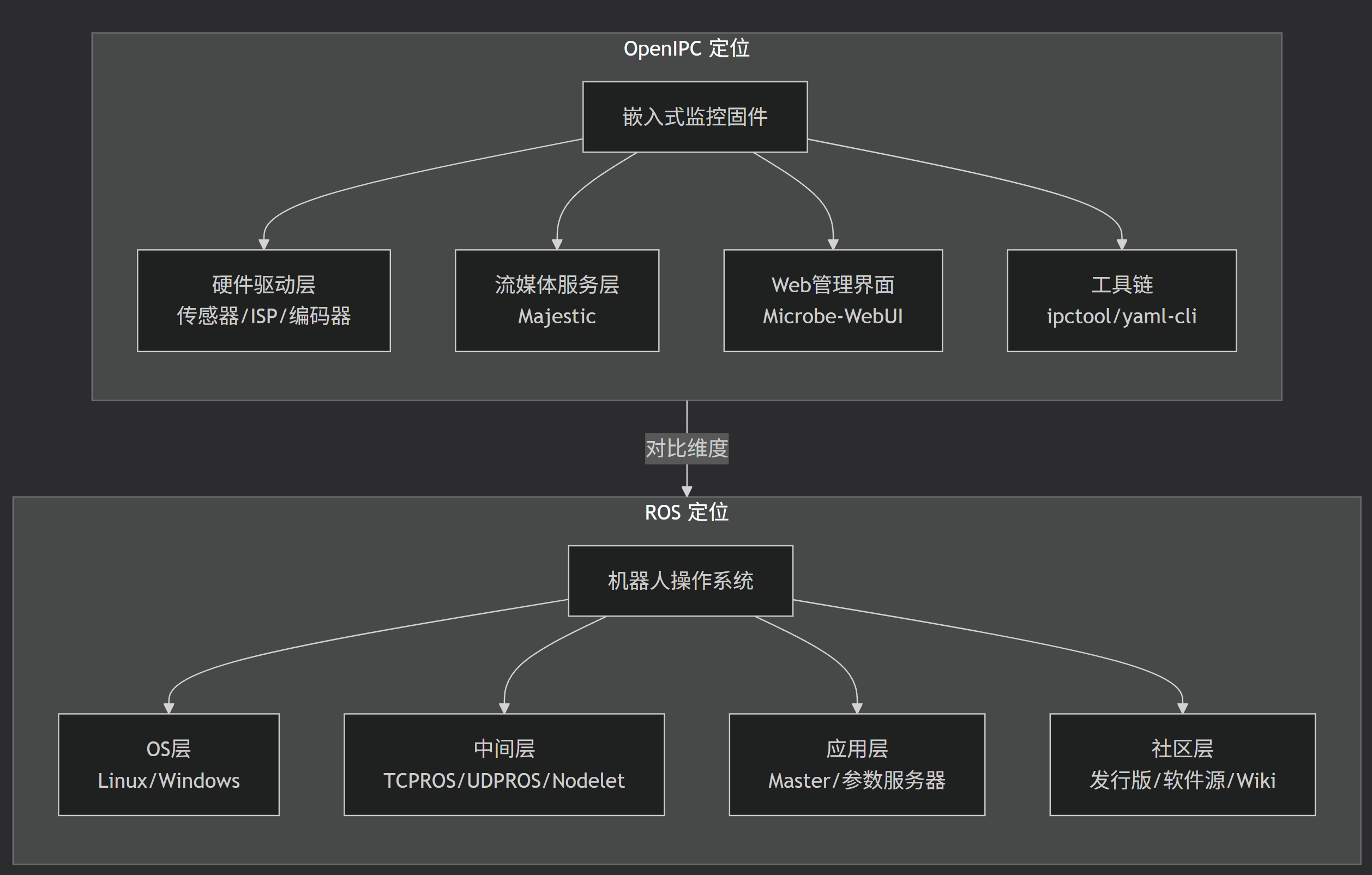
一. OpenIPC vs ROS:核心定位对比
二. 系统架构树形对比
2.1 OpenIPC 系统架构
openipc-system/ ├── 📁 硬件抽象层 │ ├── 📁 SoC适配层 │ │ ├── hisilicon/ # 海思平台驱动 │ │ │ ├── hi3516cv300/ │ │ │ └── hi3519v101/ │ │ ├── sigmastar/ # 星宸平台 │ │ │ ├── ssc335/ │ │ │ └── ssr305/ # 支持硬件IPC │ │ └── goke/ # 国科平台 │ └── 📁 外设驱动 │ ├── sensor/ # 图像传感器 │ │ ├── imx335.c # Sony传感器 │ │ └── sc2235.c # SmartSens │ └── spi-flash/ # 存储接口 │ ├── 📁 核心服务层 │ ├── 📁 Majestic流引擎 # 视频处理核心 │ │ ├── encoder/ # 硬件编码器 │ │ │ ├── h264_encoder.c # H.264编码 │ │ │ └── h265_encoder.c # H.265编码 │ │ ├── streaming/ # 流媒体服务 │ │ │ ├── rtsp_server.c # RTSP协议 │ │ │ └── onvif_server.c # ONVIF标准 │ │ └── osd/ # 图像叠加 │ └── 📁 系统管理 │ ├── init-scripts/ # 启动脚本 │ └── watchdog/ # 硬件看门狗 │ ├── 📁 工具链层 │ ├── ipctool # 硬件检测 │ │ ├── soc_detect.c # SoC型号识别 │ │ ├── sensor_detect.c # 传感器探测 │ │ └── temperature.c # 温度读取 │ └── yaml-cli # 配置管理 │ ├── parser.c # YAML解析 │ └── validator.c # 配置验证 │ └── 📁 应用层 ├── microbe-webui # 嵌入式Web界面 ├── majestic-plugins # 插件系统 │ ├── motion_detection/ # 运动检测 │ └── face_detection/ # 人脸识别 └── cloud-connect/ # 云平台对接
2.2 ROS 系统架构
ros-system/ ├── 📁 OS层 │ ├── Linux内核 # Ubuntu为首选 │ ├── Windows支持 # ROS2开始支持 │ └── 硬件抽象 │ ├── 设备驱动封装 │ └── 实时内核支持 │ ├── 📁 中间层 │ ├── 📁 通信系统 │ │ ├── TCPROS # 基于TCP的ROS协议 │ │ ├── UDPROS # 基于UDP的ROS协议 │ │ └── Nodelet # 进程内通信 │ ├── 📁 机器人库 │ │ ├── tf2 # 坐标变换 │ │ ├── urdf # 机器人模型描述 │ │ └── move_base # 运动规划 │ └── 📁 工具库 │ ├── roscpp # C++客户端库 │ └── rospy # Python客户端库 │ ├── 📁 应用层 │ ├── 📁 Master # 节点管理器 │ │ ├── 节点注册 │ │ ├── 参数服务器 │ │ └── 服务发现 │ ├── 📁 节点网络 │ │ ├── 发布/订阅模型 │ │ ├── 客户端/服务器模型 │ │ └── 动作服务器 # Actionlib │ └── 📁 功能包集 │ ├── navigation # 导航堆栈 │ ├── manipulation # 机械臂控制 │ └── perception # 感知模块 │ └── 📁 社区层 ├── 发行版 # 如Noetic, Humble ├── 软件源 # GitHub/Bitbucket ├── ROS Wiki # 文档中心 └── ROS Answers # 问答社区
三 通信机制深度对比
3.1 IPC(核间通信)在OpenIPC中的实现
/**
* @file ssr305_ipc.c
* @brief SSR305芯片IPC硬件加速实现
*
* OpenIPC使用硬件IPC实现多核异构通信:
* - 视频处理核 (ARM) ↔ DSP核 (图像处理)
* - 主控核 (Cortex-A) ↔ 网络协议核 (Cortex-M)
*/
/**
* @struct ipc_hw_config
* @brief 硬件IPC配置表
*/
typedef struct {
uint32_t channel_num; /**< 通道号 0-15 */
uint32_t direction; /**< 传输方向标识 */
void (*rx_callback)(void*); /**< 接收中断回调 */
void (*tx_callback)(void*); /**< 发送完成回调 */
uint32_t msg_type; /**< IPC_USER_DATA / IPC_USER_POINT */
} ipc_hw_config_t;
/**
* @brief IPC数据收发示例
* @note 硬件加速特性:共享SRAM + 专用中断
*/
void ipc_transfer_example(void)
{
/* 1. 通道选择 - 硬件隔离设计 */
ipc_hw_config_t chn_cfg = {
.channel_num = IPC_VIDEO_CHAN, // 专用视频通道
.direction = IPC_A7_TO_M4, // A7核→M4核
.msg_type = IPC_USER_POINT, // 指针传递大数据
};
/* 2. 数据发送 - 硬件触发中断 */
IPC_MSG_STRUCT msg = {
.msg_type = IPC_USER_POINT,
.msg = (uint32_t)&frame_buffer, // 共享内存地址
.msg_len = frame_size,
};
ipc_send_message(IPC_A7_TO_M4, IPC_VIDEO_CHAN, &msg);
/* 3. 接收端处理 - 中断上下文 */
void rx_isr_handler(void) {
// 硬件自动定位共享内存
PIPC_MSG_STRUCT rx_msg = ipc_get_message(IPC_A7_TO_M4, IPC_VIDEO_CHAN);
// 小数据直接读取,大数据拷贝到本地
if (rx_msg->msg_len <= 4) {
process_small_data(rx_msg->msg);
} else {
_memcpy(local_buffer, (void*)rx_msg->msg, rx_msg->msg_len);
rtos_sema_give(processing_sema); // 触发任务处理
}
}
}
3.2 ROS通信机制
"""
@file ros_communication.py
@brief ROS分布式通信实现
@note 基于TCP/UDP的网络通信,支持跨主机分布式部署
"""
import rospy
from std_msgs.msg import String
from geometry_msgs.msg import Twist
class ROSCommunicationExample:
"""
@class ROSCommunicationExample
@brief ROS三种核心通信机制示例
"""
def __init__(self):
# 1️⃣ 话题通信 (Topic) - 异步发布/订阅
"""
@details 适用于传感器数据流、状态发布
- 一对多通信
- 异步非阻塞
- 数据流式传输
"""
self.pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10)
self.sub = rospy.Subscriber('/camera/image', Image, self.image_callback)
# 2️⃣ 服务通信 (Service) - 同步请求/响应
"""
@details 适用于逻辑控制、查询操作
- 一对一通信
- 同步阻塞
- 立即返回结果
"""
self.get_pose_srv = rospy.Service('/get_robot_pose', GetPose, self.handle_get_pose)
# 3️⃣ 动作通信 (Action) - 带反馈的异步任务
"""
@details 适用于长时间运行的任务
- 可取消
- 实时反馈
- 最终结果返回
"""
self.move_base_ac = actionlib.SimpleActionClient('/move_base', MoveBaseAction)
def topic_example(self):
"""话题通信:发布机器人速度指令"""
twist = Twist()
twist.linear.x = 0.5
twist.angular.z = 0.2
self.pub.publish(twist) # 异步发布
def service_example(self):
"""服务通信:请求机器人位置"""
rospy.wait_for_service('/get_robot_pose')
try:
get_pose = rospy.ServiceProxy('/get_robot_pose', GetPose)
response = get_pose() # 同步等待
return response.pose
except rospy.ServiceException as e:
rospy.logerr(f"Service call failed: {e}")
def action_example(self):
"""动作通信:导航到目标点"""
goal = MoveBaseGoal()
goal.target_pose.header.frame_id = "map"
goal.target_pose.pose.position.x = 5.0
# 发送目标并等待结果(带反馈)
self.move_base_ac.send_goal(goal, feedback_cb=self.feedback_callback)
self.move_base_ac.wait_for_result()
return self.move_base_ac.get_result()
def feedback_callback(self, feedback):
"""动作执行过程中的实时反馈"""
rospy.loginfo(f"Distance remaining: {feedback.distance_to_goal}")
四 通信机制对比表
| 特性维度 | OpenIPC (硬件IPC) | ROS (软件通信) |
|---|---|---|
| 通信基础 | 硬件共享SRAM + 专用中断 | TCP/UDP网络协议 |
| 延迟级别 | 微秒级 (硬件加速) | 毫秒级 (网络栈) |
| 数据传输 | 共享内存指针传递 | 序列化消息拷贝 |
| 最大吞吐 | 数百MB/s (DMA) | 数十MB/s (受网络限制) |
| 通信模式 | 通道隔离 + 多路并行 | 发布/订阅 + 服务调用 |
| 跨平台性 | 仅限同一芯片多核 | 跨主机/跨网络 |
| 实时性 | 硬件中断保证 | 依赖操作系统调度 |
| 典型应用 | 传感器→ISP→编码器流水线 | 多机器人协作、分布式计算 |
五 应用场景树形对比
5.1 OpenIPC典型应用场景
openipc-applications/ ├── 📁 安防监控 │ ├── 网络摄像机 (IPC) │ │ ├── 4G低功耗摄像机 │ │ └── 黑光全彩摄像机 │ ├── NVR存储系统 │ │ ├── 多路视频接入 │ │ └── 智能检索回放 │ └── 边缘计算 │ ├── 人脸识别 │ └── 车辆检测 │ ├── 📁 工业视觉 │ ├── 生产线质检 │ ├── 机器人视觉引导 │ └── 远程设备监控 │ ├── 📁 智能家居 │ ├── 智能门铃 │ ├── 婴儿监护仪 │ └── 宠物摄像机 │ └── 📁 特种应用 ├── FPV无人机图传 ├── 水下机器人视觉 └── 医疗内窥镜
5.2 ROS典型应用场景
ros-applications/ ├── 📁 移动机器人 │ ├── 自主导航 │ │ ├── SLAM建图 │ │ ├── 路径规划 │ │ └── 避障控制 │ ├── 多机器人协作 │ │ ├── 编队控制 │ │ └── 任务分配 │ └── 服务机器人 │ ├── 配送机器人 │ └── 清洁机器人 │ ├── 📁 机械臂控制 │ ├── MoveIt!框架 │ │ ├── 运动规划 │ │ ├── 逆运动学求解 │ │ └── 碰撞检测 │ ├── 抓取规划 │ └── 人机协作 │ ├── 📁 无人驾驶 │ ├── 感知模块 │ │ ├── 激光雷达点云处理 │ │ ├── 视觉目标检测 │ │ └── 传感器融合 │ ├── 决策规划 │ │ ├── 行为预测 │ │ └── 轨迹规划 │ └── 控制执行 │ └── 📁 研究与教育 ├── 算法验证 ├── 仿真测试 └── 机器人竞赛
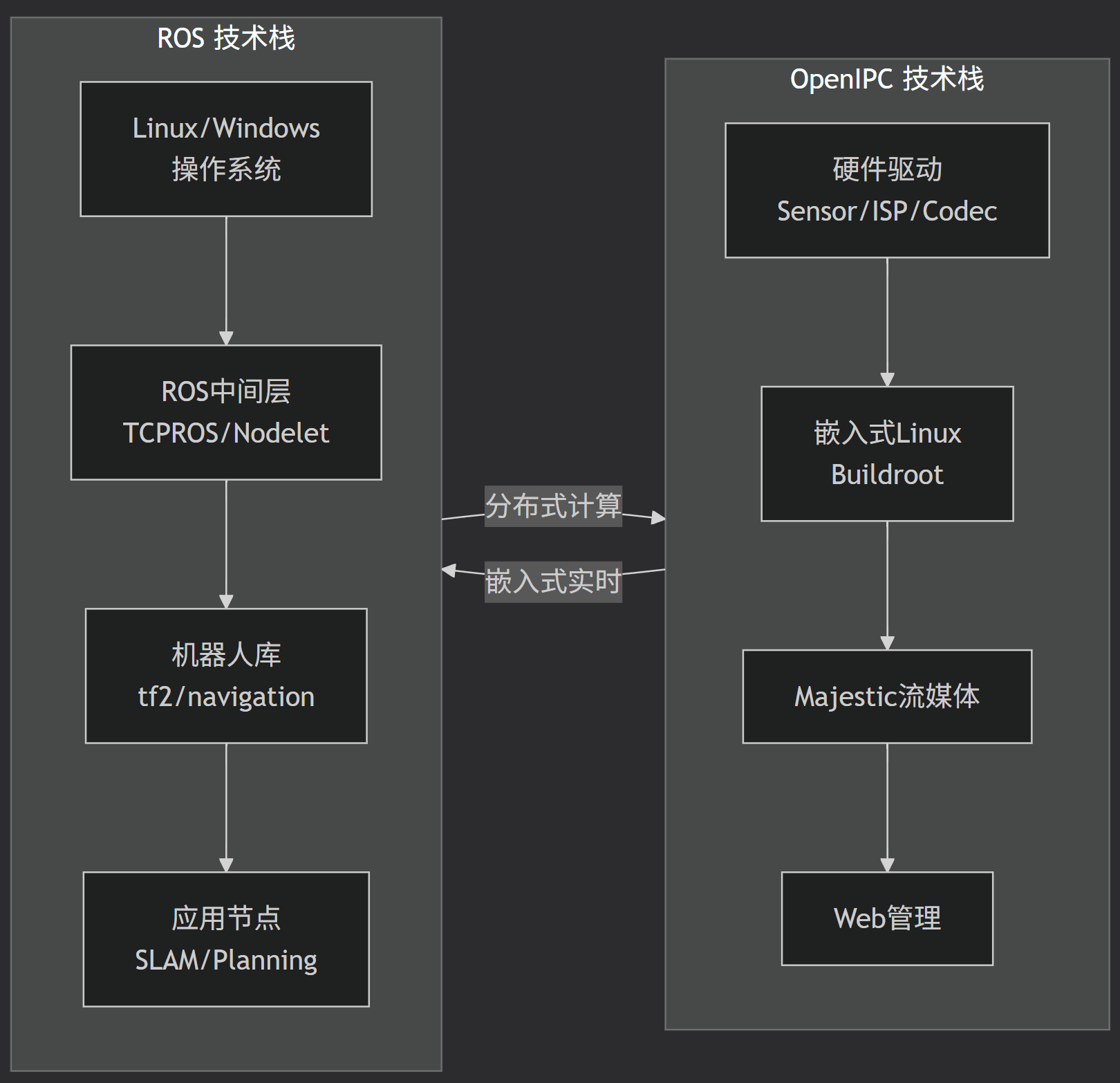
六. 关键差异总结
技术栈对比
核心差异点
| 维度 | OpenIPC | ROS |
|---|---|---|
| 本质定位 | 嵌入式监控固件 | 机器人应用框架 |
| 运行环境 | 资源受限嵌入式系统 (32-128MB RAM) | 高性能计算平台 (GB级RAM) |
| 开发语言 | C为主,少量C++ | C++/Python为主 |
| 通信实时性 | 硬件IPC保证 (微秒级) | 软件协议保证 (毫秒级) |
| 部署方式 | 固件烧录到Flash | 软件包安装到Linux |
| 社区规模 | 垂直领域专业社区 | 全球性大规模社区 |
| 扩展性 | 插件系统 (有限) | 功能包系统 (无限) |
| 硬件绑定 | 强绑定特定SoC (海思/星宸) | 硬件无关,驱动抽象层 |
| 典型用户 | 安防设备厂商 | 机器人研究机构/企业 |
七. 开源地址验证
| 项目 | 地址 | 类型 |
|---|---|---|
| OpenIPC | github.com/OpenIPC | 主组织 |
| ├─ firmware | github.com/OpenIPC/firmware | 固件源码 |
| ├─ ipctool | github.com/OpenIPC/ipctool | 硬件检测工具 |
| ├─ yaml-cli | github.com/OpenIPC/yaml-cli | 配置工具 |
| └─ majestic | github.com/OpenIPC/majestic | 流媒体服务 |
| ROS | github.com/ros2 | 主组织 |
| ├─ ros2 | github.com/ros2/ros2 | 核心元包 |
| ├─ rcl | github.com/ros2/rcl | 客户端库支持 |
| └─ examples | github.com/ros2/examples | 示例代码 |
以上对比分析展示了OpenIPC和ROS在技术定位、系统架构、通信机制和应用场景上的本质差异。OpenIPC专注于嵌入式视频监控的硬件优化和实时性,而ROS则致力于机器人领域的分布式计算和软件复用。两者在物联网和智能系统中各有侧重,互为补充。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 11
11 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)