机器人前速度前瞻控制算法:离散轨迹的平滑拼接与速度规划
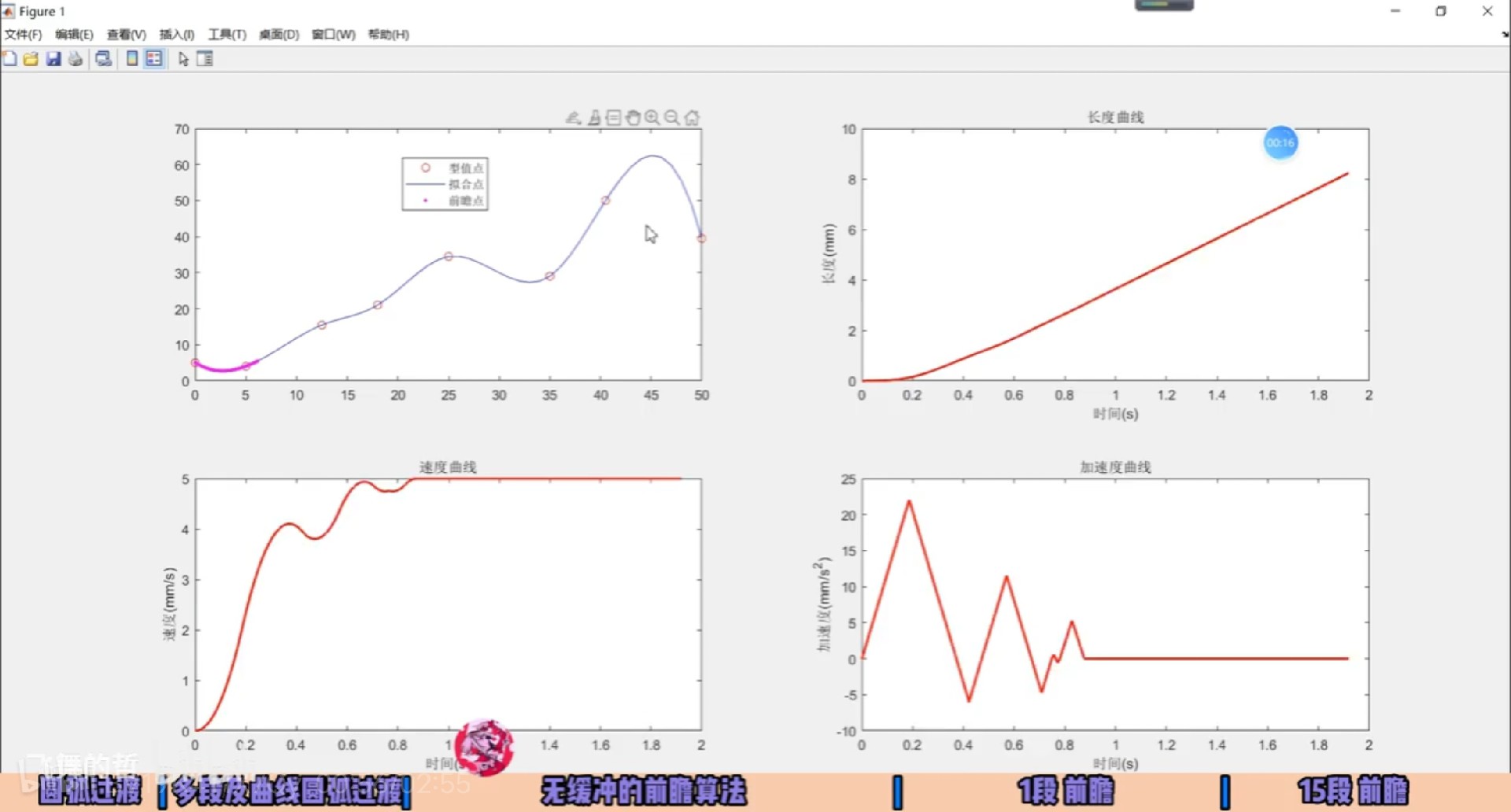
机器人前速度前瞻控制算法 机器人的前瞻控制算法,将机器人的行走轨迹进行拟合并将其离散成小段,根据弓高误差约束,采用直线圆弧的平滑拼接策略获得机器人用于前瞻的平滑轨迹。 根据曲率及最大进给速度、末端各轴最大加速度和加加速度获得各段曲线的最大速度约束条件,为了确定机器人最终速度,采用双向扫描的前瞻策略对各段衔接点速度进行调整,最后采用S型曲线规划速度曲线,采用反向插值算法,得到机器人末端各轴实时位置,以此完成前瞻速度规划,获得约束条件下加工时间最短的机器人加工轨迹。
机器人速度前瞻控制就像给机器人的大脑装了个预判系统。这玩意儿能让机器人在高速加工时,既不会跑偏,又能以最短时间完成任务。咱们今天不聊理论,直接拆解几个关键步骤,手撸点代码看看怎么落地。
轨迹处理:先切碎再拼起来
机器人原本的路径可能是复杂的曲线,直接跑容易急刹急启。这时候得把路径切成小段,再用直线和圆弧重新拼接。核心在于控制弓高误差——想象用多边形逼近曲线时的最大偏差。Python里可以这么干:
def discretize_path(original_path, max_error):
segments = []
current_point = original_path[0]
for point in original_path[1:]:
chord_error = compute_chord_error(current_point, point)
while chord_error > max_error:
mid_point = interpolate_midpoint(current_point, point)
segments.append(mid_point)
current_point = mid_point
chord_error = compute_chord_error(current_point, point)
segments.append(point)
return segments这个递归细分的关键在computechorderror函数,用向量叉乘算点到弦的垂直距离。切得越碎精度越高,但计算量也越大,得找个平衡点。
速度约束:别让机器人翻车
每个弯道都有安全限速,机器人同理。曲率半径越小,允许的最大速度越低。这里有个实用公式:
max_speed = min( sqrt( lateral_acceleration / curvature ),
jerk_limit * time_step )实际操作时还要考虑各关节电机的加速度极限。遇到过这样的坑:某次没算Z轴惯性,导致高速时机械臂颤抖,活像触电。
双向扫描:速度匹配的拉皮条
前后两段路径的速度要平滑过渡,这活儿得靠双向扫描。先正向扫一遍保守速度,再反向扫一遍压榨性能,就像这样:
def bidirectional_scan(segments):
# 正向限制
for i in range(1, len(segments)):
segments[i].v_in = min( segments[i-1].v_out,
segments[i].max_entry_speed )
# 反向压榨
for i in reversed(range(len(segments)-1)):
segments[i].v_out = min( segments[i+1].v_in,
sqrt( segments[i].v_in**2 + 2*accel*segment.length ) )
return segments这里有个骚操作:反向扫描时用运动学公式vend² = vstart² + 2as来提升速度,相当于把前面省下的加速距离用在后面。
S曲线规划:让加减速像德芙般顺滑
梯形加速太生硬,S型曲线才是王道。用Python生成七段式S曲线:
def s_curve(t, a_max, j_max):
# 加加速阶段
if t < t1:
j = j_max
# 匀加速阶段
elif t < t2:
j = 0
# 减加速阶段
else:
j = -j_max
# 积分得到加速度、速度
# ...(具体积分计算略)
return velocity实际调试时发现,当目标速度低于最大加速度能达到的速度时,需要砍掉匀加速段,直接进减加速。这就像开车时刚踩油门就得松油门的憋屈感。
反向插值:时间倒流魔法
最后从终点反推各轴位置,比正向计算更稳定。核心是牛顿迭代:
def inverse_interpolation(target_time):
t_guess = 0
for _ in range(10): # 迭代10次
pos = forward_kinematics(t_guess)
error = target_pos - pos
jacobian = compute_jacobian(t_guess)
t_guess += np.linalg.pinv(jacobian) @ error
return t_guess曾经被雅可比矩阵的奇异性坑过,后来加了阻尼因子才解决。这步处理不好,机器人会在奇异点附近抽风。
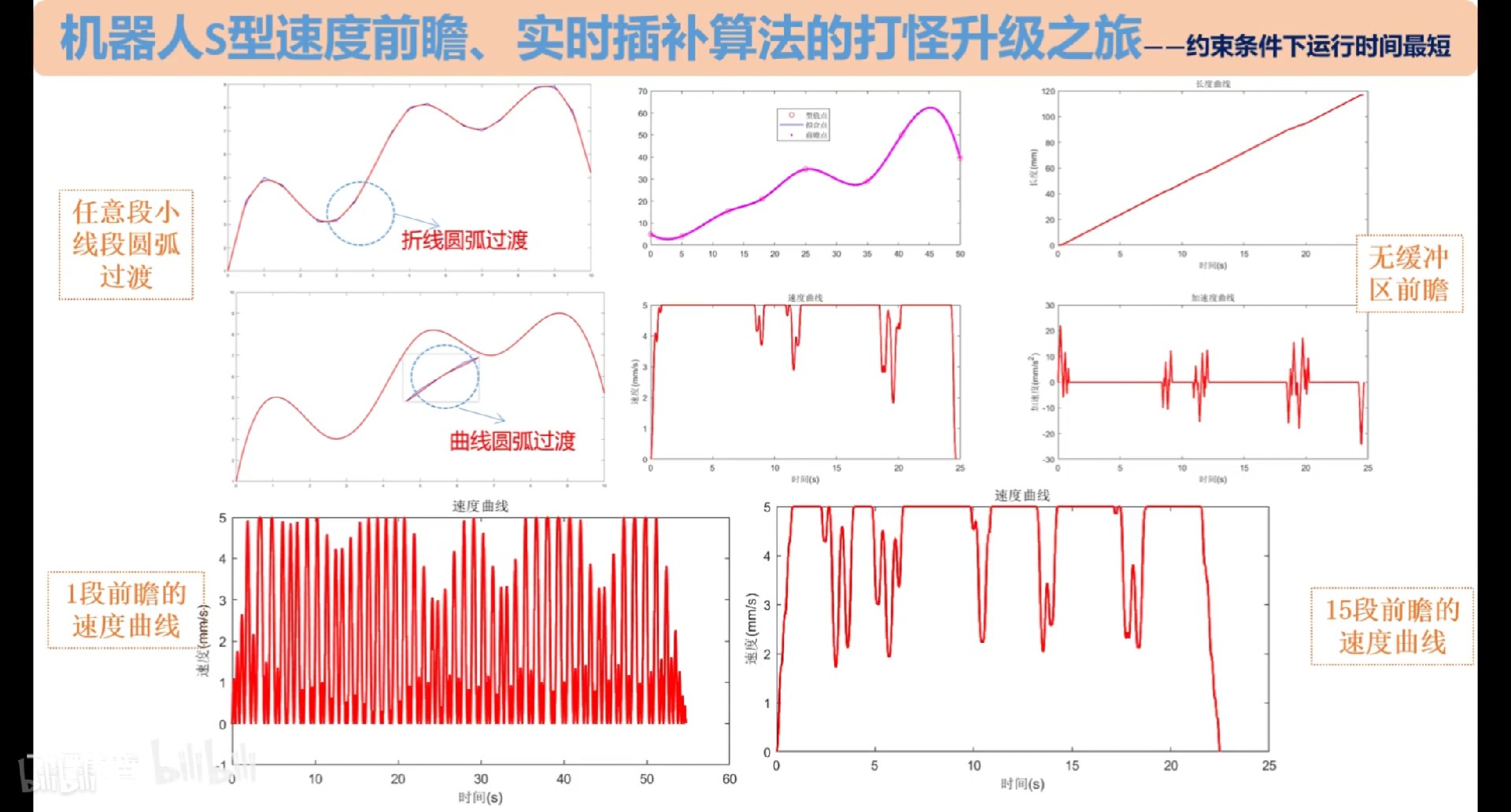
整套算法落地后,某焊接项目的节拍从53秒压到41秒,效果拔群。但别迷信理论参数,现场还得根据电机发热情况动态调整——毕竟算法再牛,硬件过热罢工也是白搭。下次可以聊聊怎么用温度反馈实时限速,那又是另一个踩坑故事了。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 3
3 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)