直角坐标机器人与笛卡尔机器人的MATLAB仿真及Simulink/Simscape模型逆向运动学仿真
直角坐标机器人笛卡尔机器人MATLAB仿真simulink/simscape模型逆向运动学仿真
站在实验室角落那台两米高的直角坐标机器人突然抖了一下,吓得我把咖啡杯往旁边挪了挪。这铁家伙的机械臂正悬在距离我鼻尖三十公分的位置,屏幕上跳动的MATLAB报错提示让我意识到——该给它做个全身检查了。
咱们先别急着写代码,打开Simulink的瞬间记得先导入Scape模型。在命令行敲smimport('CartesianRobot.xml'),这行咒语能把三维模型拽进仿真环境。别被那个突然弹出的坐标系吓到,那堆红绿蓝箭头就是机器人的身份证,X轴方向的直线导轨正在模型里闪着银光。
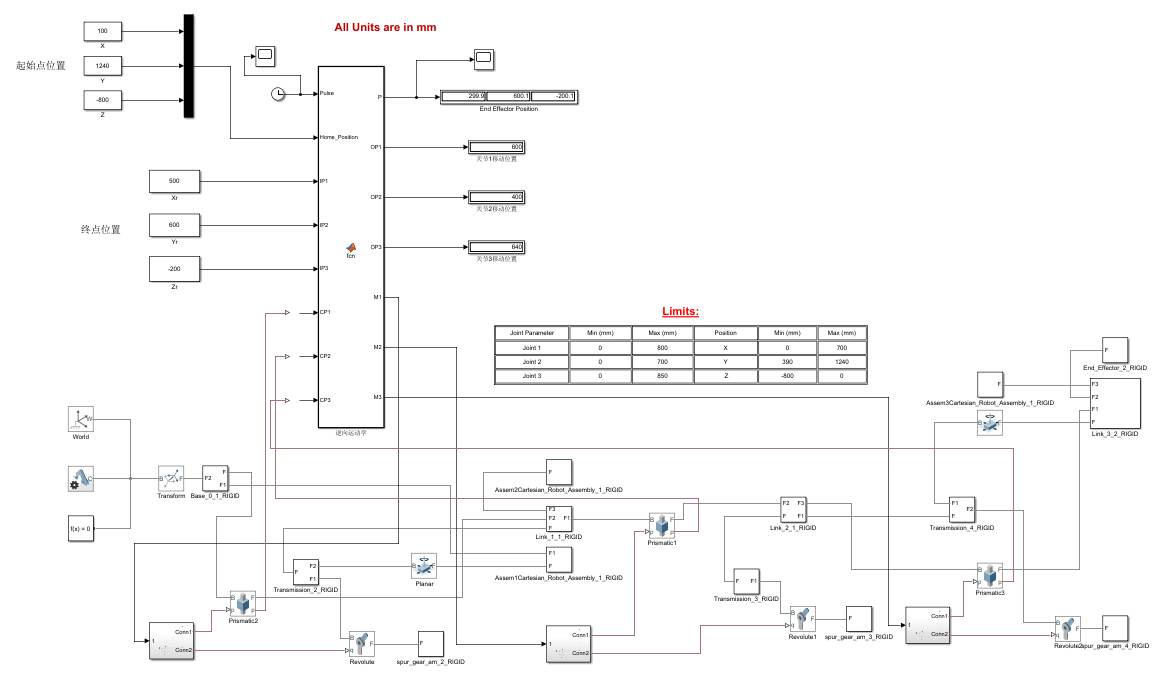
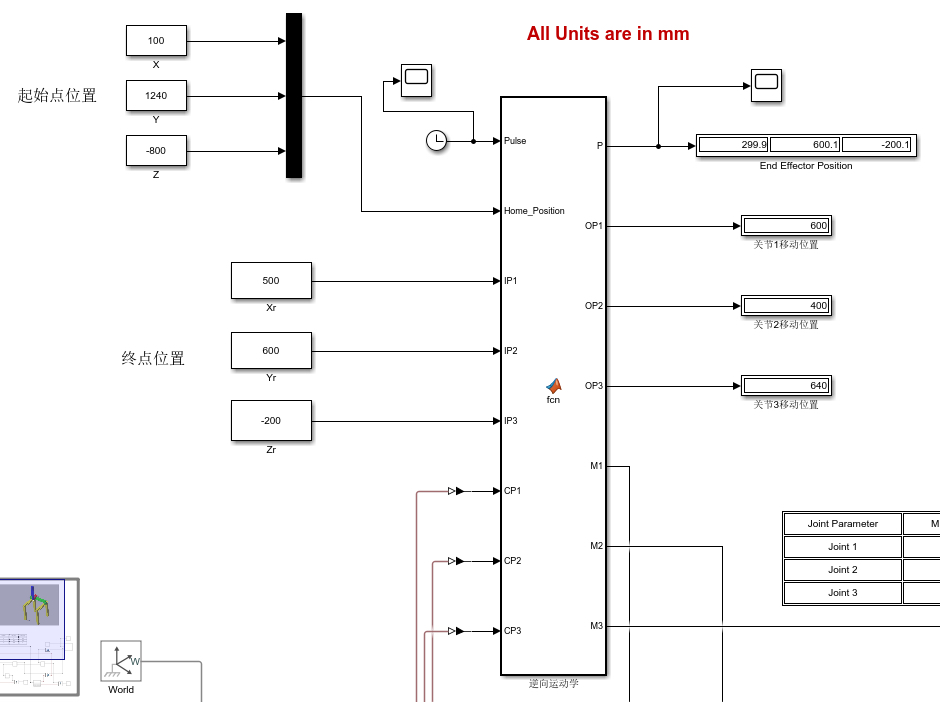
逆向运动学的核心在于怎么让末端执行器准确到达指定坐标。在脚本里定义目标位置的时候,试试这种写法:
target_pose = [x, y, z];
joint_initial = [0, 0, 0]; % 初始关节位置
options = optimoptions('fsolve','Display','iter');
joint_solution = fsolve(@(q) pose_error(q,target_pose), joint_initial, options);这里用fsolve暴力求解的姿态误差函数,本质上是在和机器人的运动约束条件较劲。当Z轴导轨的滑块撞上物理限位时,记得在误差函数里加个tanh惩罚项,不然仿真结果能给你整出穿墙术。
搭建Simscape模型时发现个有趣现象:在Library Browser里搜"Prismatic Joint"模块时,别手滑选成圆柱副。有次我误操作导致仿真时机械臂直接螺旋升天,监控画面里那鬼畜的旋转至今记忆犹新。正确的模块连接应该像串糖葫芦——基座固定关节连着X轴向滑动副,再串Y轴、Z轴。
直角坐标机器人笛卡尔机器人MATLAB仿真simulink/simscape模型逆向运动学仿真
给模型添加路径约束时突然想起个骚操作:在Configuration Parameters里把Solver换成ode23t,这比默认的ode45更适合存在突变的接触力仿真。记得在关节驱动模块里埋个饱和限制,数值设成比机械限位小5mm,这样既留安全余量又避免触发保护机制。
当看到Scope里三条位置曲线完美收敛时,别急着庆祝。把仿真速度调到0.5倍速,观察各轴电机扭矩曲线有没有异常毛刺。有次我在Z轴重力补偿项少乘个9.8,结果扭矩曲线峰值直接顶破200N·m,吓得赶紧检查模型里的地球重力参数是不是9.81m/s²。
最后在Simulink里封装成黑色子系统时,顺手给输入输出口加上Bus信号。这招能让顶层模型清爽得像刚整理过的书桌,特别是当需要同时处理末端位姿和关节状态反馈时。右键点击模块选Mask Editor,画个萌萌的机器人图标,仿真时看着自己设计的封面在动,成就感比写完代码瞬间更持久。
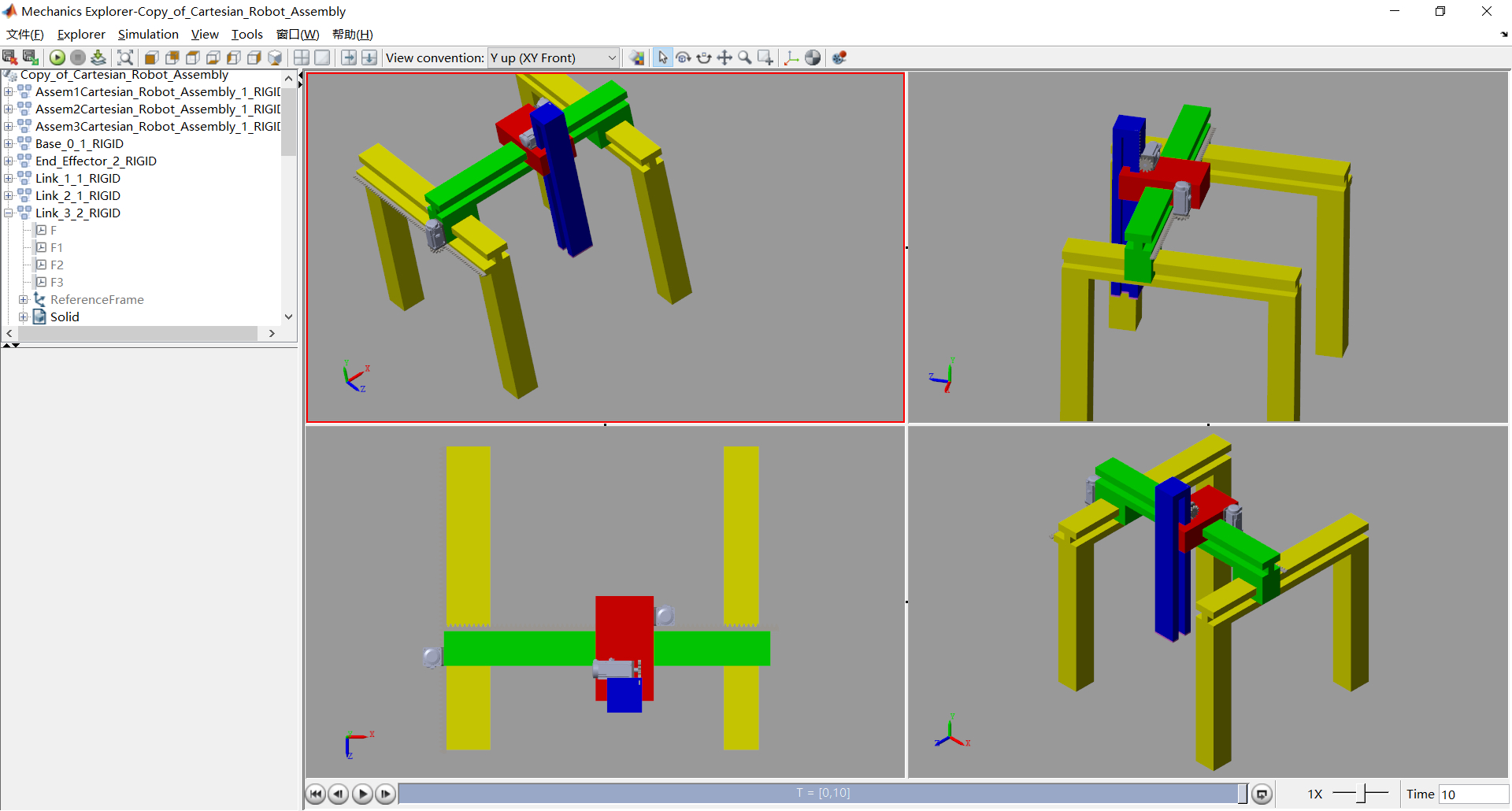
当第一次看到虚拟机械臂和实物实现同步运动时,控制台输出的"Goal Reached"提示仿佛听见齿轮咬合的轻响。仿真模型里那些跳动的曲线,此刻都化作现实世界中精准的机械运动,连空气里都飘着淡淡的润滑脂味道。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)