六轴机器人仿真及轨迹规划:姿态插补与关节、笛卡尔空间轨迹规划自制353
六轴机器人仿真轨迹规划姿态插补关节空间轨迹规划笛卡尔空间轨迹规划 353轨迹规划自制
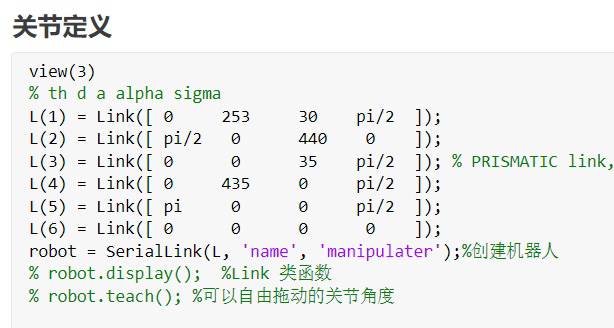
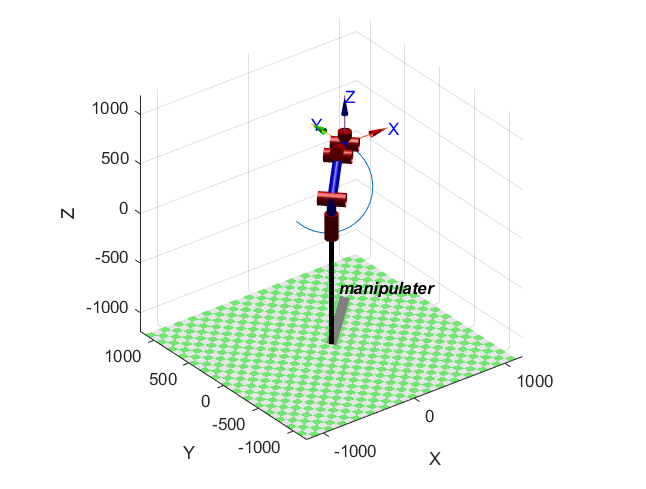
机器人轨迹规划一直是机器人学领域中的核心问题,尤其是在工业自动化中,六轴机器人因其灵活性和高精度而被广泛应用。今天,我想和大家分享一下六轴机器人轨迹规划的一些基本思路和一个简化的示例。
**轨迹规划的两类空间**
轨迹规划通常分为两类:关节空间轨迹规划和笛卡尔空间轨迹规划。前者是在关节空间中直接规划关节角随时间的变化,后者则是在笛卡尔空间中规划末端执行器的运动轨迹,再通过逆运动学映射到关节空间。
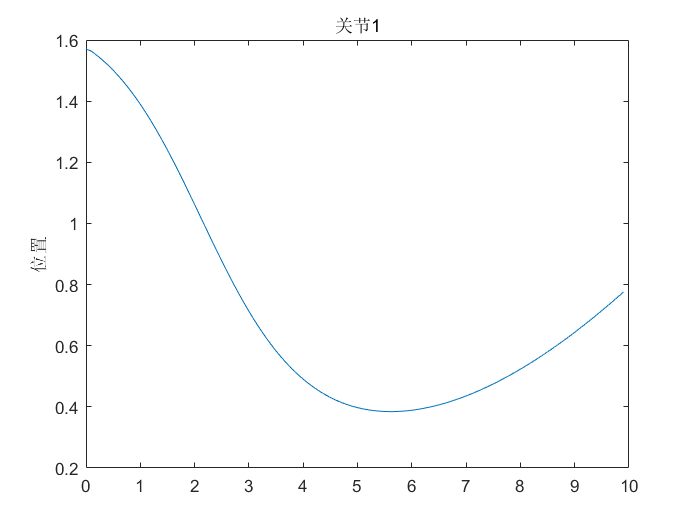
**关节空间轨迹规划**
关节空间轨迹规划相对简单,因为它直接操作机器人的关节参数。例如,可以采用多项式插值的方法来规划关节角随时间的变化。
def polynomial_interpolation(q0, q1, t):
# q0: 起始位置
# q1: 目标位置
# t: 当前时间
a = q0
b = q1 - q0
return a + b * t # 线性插值虽然这样简单的方法在某些情况下也能用,但在实际应用中,我们需要更平滑的轨迹,比如使用三次多项式或五次多项式插值,以确保轨迹的连续性和光滑性。
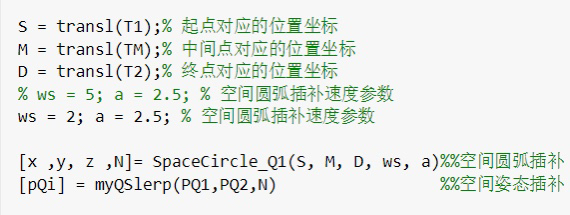
**笛卡尔空间轨迹规划**
笛卡尔空间轨迹规划更直观,因为它直接反映了机器人的实际运动路径。不过,笛卡尔空间规划需要考虑更多的约束条件,例如机器人的可达性、奇异点等。这里通常会用到逆运动学的知识。
# 一个简化的逆运动学示例
def ik(x, y, z):
# 根据笛卡尔坐标计算关节角
# 这里简化为直接返回一个固定值
# 实际应用中需要更复杂的计算
return [0.1, 0.2, 0.3, 0.4, 0.5, 0.6]**姿态插补**
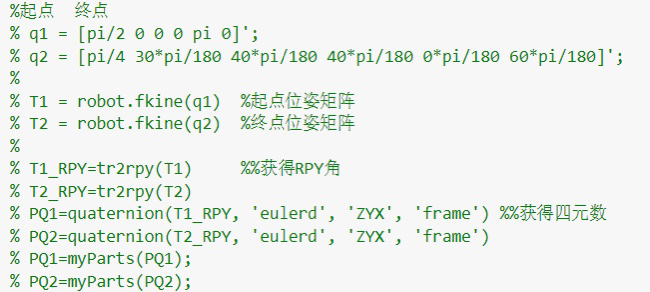
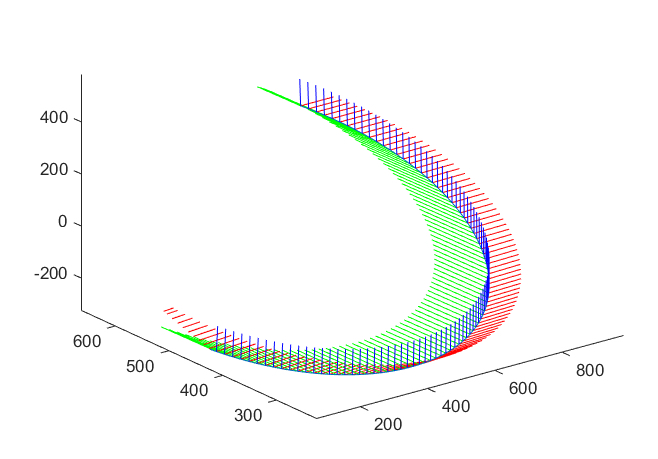
姿态插补是轨迹规划中的一个重要环节,尤其是在需要精确控制机器人末端执行器姿态的情况下。姿态插补通常用于插值两个姿态之间的过渡过程。
六轴机器人仿真轨迹规划姿态插补关节空间轨迹规划笛卡尔空间轨迹规划 353轨迹规划自制
一个常见的方法是使用Slerp(球面线性插值),这种方法可以平滑地插值两个四元数姿态,避免了欧拉角插值可能带来的“万向锁”问题。
import numpy as np
from scipy.spatial.transform import Rotation as R
def slerp(q0, q1, t):
r0 = R.from_quat(q0)
r1 = R.from_quat(q1)
r = r0.slerp(t, r1)
return r.as_quat()通过Slerp方法,我们可以确保姿态过渡时的平滑性,这对于实际应用中的机器人操作至关重要。
**综合示例:基于ROS的轨迹规划**
在实际应用中,我们可以结合ROS(机器人操作系统)和MoveIt!来实现一个完整的轨迹规划系统。下面是一个简化的示例:
# ROS节点示例
import rospy
from trajectory_msgs.msg import JointTrajectory, JointTrajectoryPoint
def trajectory_planner():
pub = rospy.Publisher('/joint_trajectory', JointTrajectory, queue_size=10)
rospy.init_node('trajectory_planner', anonymous=True)
while not rospy.is_shutdown():
traj = JointTrajectory()
traj.joint_names = ['joint1', 'joint2', 'joint3', 'joint4', 'joint5', 'joint6']
point = JointTrajectoryPoint()
point.positions = [1.0, 0.2, 0.3, 0.4, 0.5, 0.6]
point.time_from_start = rospy.Duration(5.0)
traj.points.append(point)
pub.publish(traj)
rospy.sleep(0.1)
if __name__ == '__main__':
try:
trajectory_planner()
except rospy.ROSInterruptException:
pass这个示例展示了如何在ROS中发布一个简单的关节轨迹。实际应用中,我们可以结合更复杂的轨迹规划算法来生成平滑的运动轨迹。
**总结**
六轴机器人轨迹规划是一个复杂而有趣的问题,它涉及到运动学、动力学、控制理论等多个领域的知识。通过合理选择规划空间(关节空间或笛卡尔空间)、使用合适的方法(如Slerp)进行姿态插补,以及结合实际应用中的工具(如ROS和MoveIt!),我们可以实现一个高效且可靠的轨迹规划系统。
希望这篇文章对你理解六轴机器人轨迹规划有所帮助!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 15
15 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)